2025年测绘程序设计模拟赛一--地形图图幅编号及图廓点经纬度计算
想要在2026年参加这个比赛的,可以加入小编和其它大佬所建的群242845175一起来备赛,为2026年的比赛打基础,也可以私信小编,为你答疑解惑
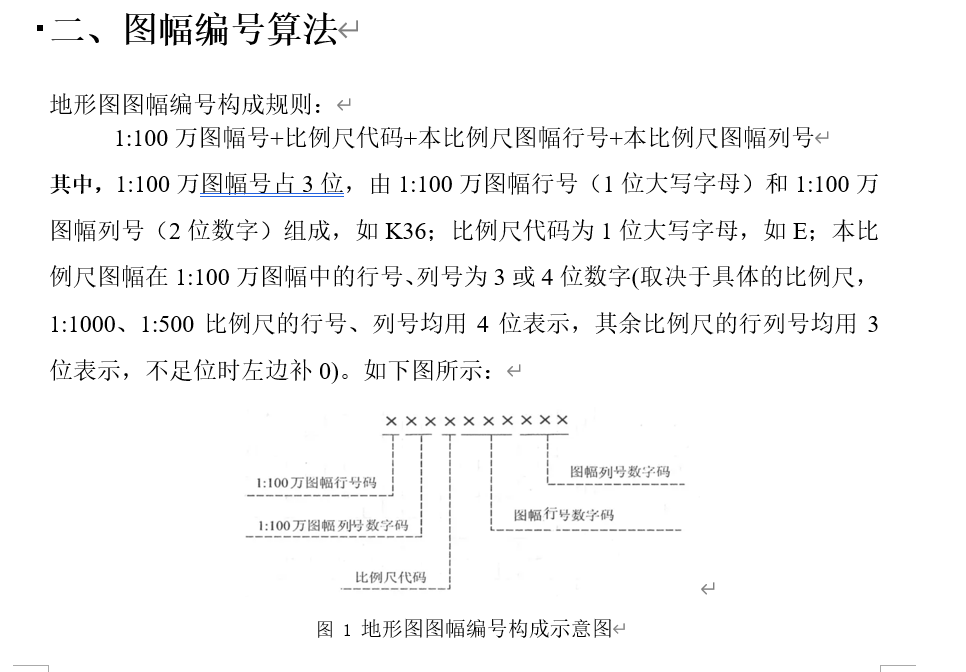
一、读取文件
这里有两种文件需要读取,所以要额外处理
internal class Read
{public static List<Point> Points = new List<Point>();public static List<Point> BLdms = new List<Point>();public static List<Point> Newmap = new List<Point>();public static List<Point> ReadfileBL(string filename){string str;StreamReader sr = new StreamReader(filename);while(!sr.EndOfStream){str = sr.ReadLine();string[]Buf= str.Split(new char[] { ',', '\t', ' ' }, StringSplitOptions.RemoveEmptyEntries);Point pt=new Point(Buf[0], double.Parse(Buf[1]), double.Parse(Buf[2]));Points.Add(pt);BLdms.Add(pt);}return Points;}public static List<Point> ReadfileNewmap(string filename){string str;StreamReader sr = new StreamReader(filename);while (!sr.EndOfStream){str = sr.ReadLine();string[] Buf = str.Split(new char[] { ',', '\t', ' ' }, StringSplitOptions.RemoveEmptyEntries);Point pt = new Point(int.Parse(Buf[0]), Buf[1]);Points.Add(pt);Newmap.Add(pt);}return Points;}
}
二、度与dms之间的转化
public static double dL_100w = dms_rad(6);
public static double dB_100w = dms_rad(4);
public static double dL_50w=dms_rad(3);
public static double dB_50w=dms_rad(2);
public static double dL_25w = dms_rad(1.30);
public static double dB_25w = dms_rad(1);
public static double dL_10w = dms_rad(0.30);
public static double dB_10w = dms_rad(0.20);
public static double dL_5w = dms_rad(0.15);
public static double dB_5w = dms_rad(0.10);
public static double dL_2d5w = dms_rad(0.073);
public static double dB_2d5w = dms_rad(0.05);
public static double dL_1w = dms_rad(0.0345);
public static double dB_1w = dms_rad(0.0230);
public static double dL_5k = dms_rad(0.01525);
public static double dB_5k = dms_rad(0.0115);
public static double dL_2k = dms_rad(0.00375);
public static double dB_2k = dms_rad(0.0025);
public static double dL_1k = dms_rad(0.001875);
public static double dB_1k = dms_rad(0.00125);
public static double dL_5b = dms_rad(0.0009375);
public static double dB_5b = dms_rad(0.000625);//dms转化为度进制
public static double dms_rad(double dms)
{int a = (int)dms;double b = (int)((dms - a) * 100) * 60;double c = ((int)(dms * 10000 % 100) + b) / 3600;return (a+c);}
//十进制转化为dms
public static double rad_dms(double rad)
{double d = (int)rad;double m = (int)((rad - d) * 60);double s = ((rad - d) * 60 - m) * 60;double dms = d + m / 100 + s / 10000;if (s >= 59.999)//出现了 115度30分60秒的结果错误{dms = dms - 0.0060 + 0.01;if (m + 1 >= 59.999){dms = dms + 1 - 0.60;}}return dms;
}
三、经纬度转化为新版图幅
public static void avg(){double sumb = 0;double suml = 0;for (int i = 0; i < Read.BLdms.Count; i++){sumb += Read.BLdms[i].B_dms;suml += Read.BLdms[i].L_dms;}Point avgpt = new Point("avg", sumb / Read.BLdms.Count, suml / Read.BLdms.Count);Read.BLdms.Add(avgpt);}public static void Selectnumber(double scale,out double dertaB,out double dertaL,out string sc){dertaB = 0;dertaL = 0;sc = null;switch (scale){case 1000000:dertaB = dB_100w;dertaL=dL_100w;sc = "A";break;case 500000:dertaB = dB_50w;dertaL=dL_50w;sc = "B";break;case 250000:dertaB = dB_25w;dertaL=dL_25w;sc = "C";break;case 100000:dertaB = dB_10w;dertaL=dL_10w;sc = "D";break;case 50000:dertaB = dB_5w;dertaL=dL_5w;sc = "E";break;case 25000:dertaB = dB_2d5w;dertaL=dL_2d5w;sc = "F";break;case 10000:dertaB = dB_1w;dertaL=dL_1w;sc = "G";break;case 5000:dertaB = dB_5k;dertaL = dL_5k;sc = "H";break;case 2000:dertaB = dB_2k;dertaL=dL_2k;sc = "I";break;case 1000:dertaB = dB_1k;dertaL=dL_1k;sc = "J";break;case 500:dertaB = dB_5b;dertaL=dL_5b;sc = "K";break;}}//把经纬度转化为新版图幅public static void Bl_newmap(Point point){Selectnumber(point.scale, out double dertaB, out double dertaL,out string sc);int a = (int)(point.B_rad / 4) + 1;char c = (char)(a - 'A' + 1);int b = (int)(point.L_rad / 6) + 31;int m = (int)((point.L_rad % 6)/dertaL)+1;string e = m.ToString();string f = null;string h = null;int n =(int) (4/dertaB)-(int)((point.B_rad % 4)/dertaB);string g=n.ToString();if (point.scale == 1000 || point.scale == 500){f = e.PadLeft(4, '0');h = g.PadLeft(4, '0');}else{f = e.PadLeft(3, '0');h = g.PadLeft(3, '0');}point.newmap=a.ToString()+b.ToString()+sc.ToString()+h.ToString()+f.ToString(); }
四、新版图幅转化为西南角经纬度
public static void Selectid(string id, out double dertaB, out double dertaL, out double scale)
{dertaB = 0;dertaL = 0;scale = 0;switch (id){case "A":dertaB = dB_100w;dertaL = dL_100w;scale = 1000000;break;case "B":dertaB = dB_50w;dertaL = dL_50w;scale = 500000;break;case "C":dertaB = dB_25w;dertaL = dL_25w;scale = 250000;break;case "D":dertaB = dB_10w;dertaL = dL_10w;scale = 10000;break;case "E":dertaB = dB_5w;dertaL = dL_5w;scale=50000;break;case "F":dertaB = dB_2d5w;dertaL = dL_2d5w;scale = 25000;break;case "G":dertaB = dB_1w;dertaL = dL_1w;scale = 10000;break;case "H":dertaB = dB_5k;dertaL = dL_5k;scale = 5000;break;case "I":dertaB = dB_2k;dertaL = dL_2k;scale = 2000;break;case "J":dertaB = dB_1k;dertaL = dL_1k;scale = 1000;break;case "K":dertaB = dB_5b;dertaL = dL_5b;scale = 500;break;}}public static void Nmap_bl(Point point)
{string nem = point.newmap;int line_100 = (int)(nem[0] - 'A' + 1);int up_100=int.Parse(nem.Substring(1,2));point.lin_100=line_100;point.u_100=up_100;point. B_100=(line_100-1) * 4;point. L_100 = (up_100 - 31) * 6;string c = nem[3].ToString();Selectid(c, out double dertaB, out double dertaL, out double scale);point.scale = scale;int n=(int)(4/dertaB);double cc = 0;double d = 0;if (point.scale == 1000 || point.scale == 500){cc=int.Parse(nem.Substring(4,4));d=int.Parse(nem.Substring(8, 4));}else{cc = int.Parse(nem.Substring(4, 3));d = int.Parse(nem.Substring(7, 3));}point.leftdownB=point.B_100+dertaB*(n-cc);point.leftdownL = point.L_100 + dertaL * (d - 1);point.rightdownB = point.leftdownB;point.rightdownL = point.leftdownL + dertaL;point.leftupB = point.leftdownB + dertaB;point.leftupL = point.leftdownL;point.rightupL = point.leftdownL + dertaL;point.rightupB=point.leftdownB + dertaB;
}
五、事件交互
public partial class Form1 : Form
{public Form1(){InitializeComponent();openFile.FileOk += openFile_FileOk;}public static List<Point> bBLdms= new List<Point>();public static List<Point> bNewmap= new List<Point>();public string report = null;private void openFile_FileOk(object sender, CancelEventArgs e){}private void toolStripLabel1_Click(object sender, EventArgs e){if(openFile.ShowDialog() == DialogResult.OK){string file=openFile.FileName;Read.ReadfileBL(file);bBLdms=Read.BLdms;dataGridView1.RowCount = bBLdms.Count;for(int i=0;i<bBLdms.Count;i++) {dataGridView1[0, i].Value = bBLdms[i].name;dataGridView1[2, i].Value = bBLdms[i].B_dms;dataGridView1[3, i].Value = bBLdms[i].L_dms;}}}private void toolStripLabel2_Click(object sender, EventArgs e){if (openFile.ShowDialog() == DialogResult.OK){string file = openFile.FileName;Read.ReadfileNewmap(file);bNewmap = Read.Newmap;dataGridView2.RowCount = bNewmap.Count;for (int i = 0; i < bNewmap.Count; i++){dataGridView2[1, i].Value = bNewmap[i].ID;dataGridView2[4, i].Value = bNewmap[i].newmap;}}}private void toolStripLabel3_Click(object sender, EventArgs e){Alth.avg();report += Read.BLdms[0].L_dms.ToString("F5")+"\n";report += Read.BLdms[2].B_dms.ToString("F5")+"\n";report += Read.BLdms[2].L_rad.ToString("F6")+"\n";report += Read.BLdms[2].B_rad.ToString("F6") + "\n";report += Alth.rad_dms(Read.BLdms[3].B_rad).ToString("F6") + "\n";report += Alth.rad_dms(Read.BLdms[3].L_rad).ToString("F6") + "\n";report += Read.BLdms[3].B_rad.ToString("F6") + "\n";report += Read.BLdms[3].L_rad.ToString("F6") + "\n";Read.BLdms[3].scale = 250000;Alth.Bl_newmap(Read.BLdms[3]);report += Read.BLdms[3].newmap.Substring(4, 3)+"\n";report += Read.BLdms[3].newmap.Substring(7, 3)+"\n";Read.BLdms[3].scale = 500;Alth.Bl_newmap(Read.BLdms[3]);report += Read.BLdms[3].newmap.Substring(4, 4) + "\n";report += Read.BLdms[3].newmap.Substring(8, 4) + "\n";richTextBox1.Text = report;}private void toolStripLabel5_Click(object sender, EventArgs e){Alth.Nmap_bl(Read.Newmap[0]);report += Read.Newmap[0].lin_100 + "\n";report += Read.Newmap[0].u_100 + "\n";Alth.Nmap_bl(Read.Newmap[1]);report += Read.Newmap[1].lin_100 + "\n";report += Read.Newmap[1].u_100 + "\n";report += Read.Newmap[0].scale + "\n";report += Read.Newmap[1].scale + "\n";report += Alth.rad_dms(Read.Newmap[0].leftdownL).ToString("F5")+ "\n";report += Alth.rad_dms(Read.Newmap[0].leftdownB).ToString("F5") + "\n";report += Alth.rad_dms(Read.Newmap[1].leftdownL).ToString("F5") + "\n";report += Alth.rad_dms(Read.Newmap[1].leftdownB).ToString("F5") + "\n";report += Alth.rad_dms(Read.Newmap[0].rightdownL).ToString("F5") + "\n";report += Alth.rad_dms(Read.Newmap[0].rightdownB).ToString("F5") + "\n";report += Alth.rad_dms(Read.Newmap[0].rightupL).ToString("F5") + "\n";report += Alth.rad_dms(Read.Newmap[0].rightupB).ToString("F5") + "\n";report += Alth.rad_dms(Read.Newmap[0].leftupL).ToString("F5") + "\n";report += Alth.rad_dms(Read.Newmap[0].leftupB).ToString("F5") + "\n";report += Alth.rad_dms(Read.Newmap[1].rightdownL).ToString("F5") + "\n";report += Alth.rad_dms(Read.Newmap[1].rightdownB).ToString("F5") + "\n";report += Alth.rad_dms(Read.Newmap[1].rightupL).ToString("F5") + "\n";report += Alth.rad_dms(Read.Newmap[1].rightupB).ToString("F5") + "\n";report += Alth.rad_dms(Read.Newmap[1].leftupL).ToString("F5") + "\n";report += Alth.rad_dms(Read.Newmap[1].leftupB).ToString("F5") + "\n";richTextBox1.Text = report;}private void toolStripLabel4_Click(object sender, EventArgs e){SaveFileDialog sf = new SaveFileDialog();sf.Filter = "文本数据|*.txt";sf.Title = "选择保存路径";sf.FileName = "result";if(sf.ShowDialog() == DialogResult.OK){StreamWriter sw = new StreamWriter(sf.FileName);sw.Write(report);sw.Flush();}}
}
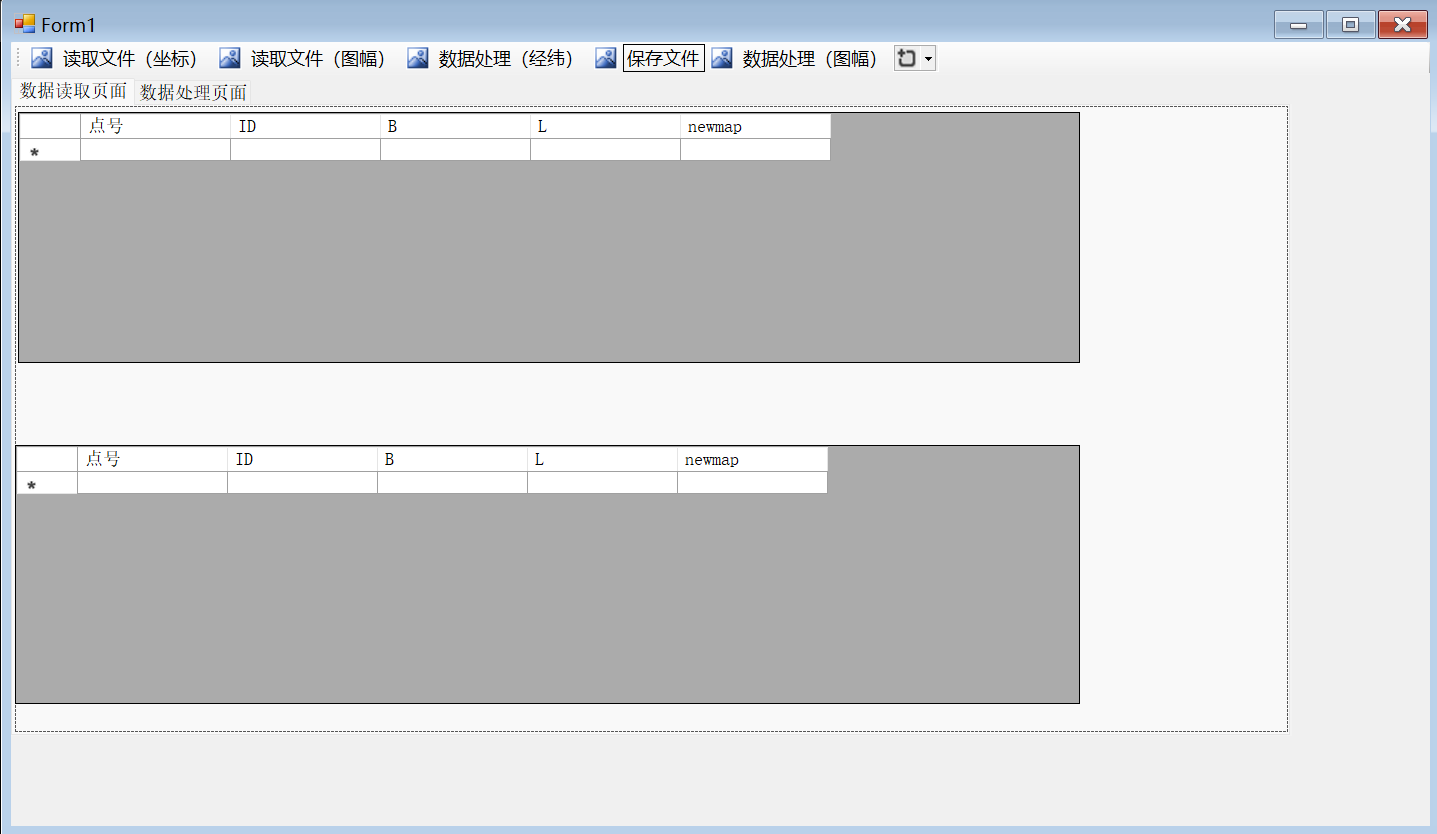
六、页面布局
七、结果
114.12353
35.30250
116.483333
35.506944
34.103300
116.022600
34.175833
116.040556
002
002
1095
0817
10
50
9
50
50000
10000
116.00000
39.50000
119.52300
32.40000
116.15000
39.50000
116.15000
40.00000
116.00000
40.00000
119.56150
32.40000
119.56150
32.42300
119.52300
32.42300