基于RPR模型的机械臂手写器simulink建模与仿真
目录
1.课题概述
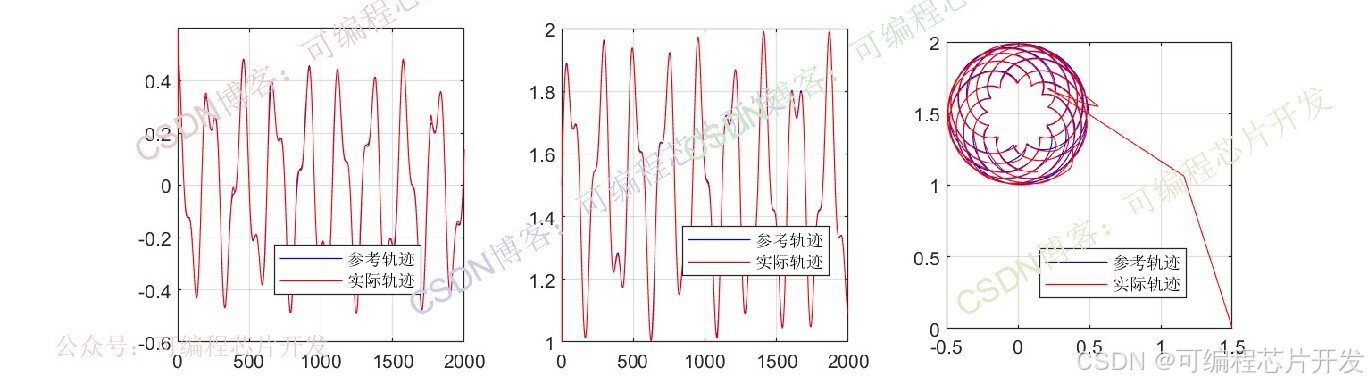
2.系统仿真结果
3.核心程序
4.系统原理简介
5.参考文献
6.完整工程文件
1.课题概述
机械臂手写器是融合机械设计、运动控制与轨迹规划的综合系统,能够模拟人类手写行为,在自动化书写、工业标记、教育演示等领域具有重要应用。RPR(Revolute-Prismatic-Revolute,旋转 - 移动 - 旋转)模型是一种典型的三自由度机械臂结构,其由旋转关节(R)、移动关节(P)和旋转关节(R)依次串联组成,兼具旋转灵活性与直线运动稳定性,特别适合平面手写任务。
2.系统仿真结果
3.核心程序
matlab2024b
figure;
S0 = 6;
% 从动画开始索引循环到数据的最后一行(以第4列的长度为准)
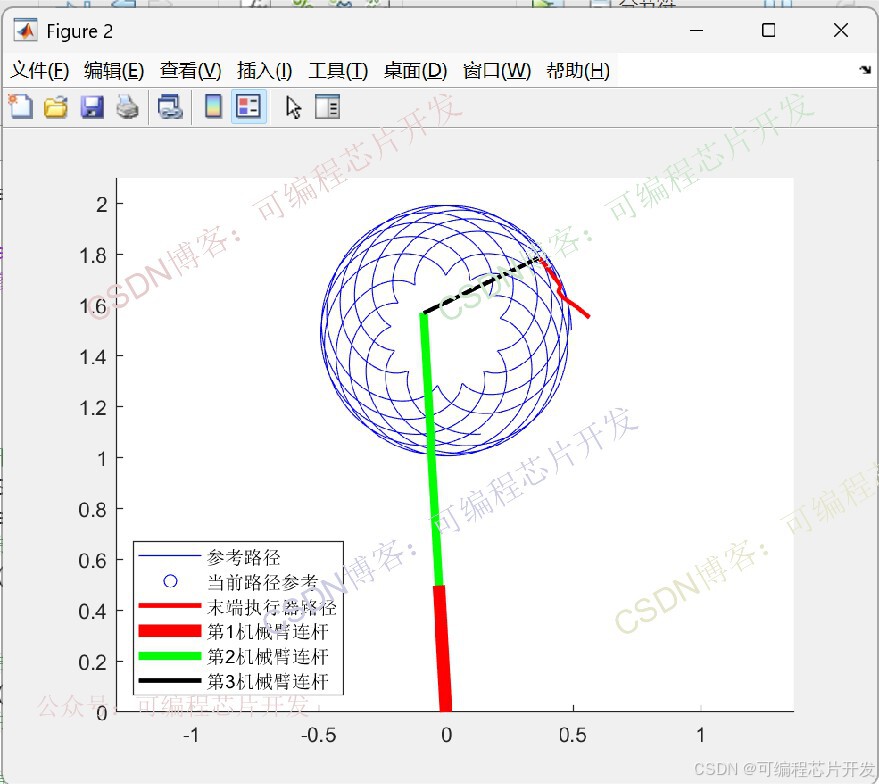
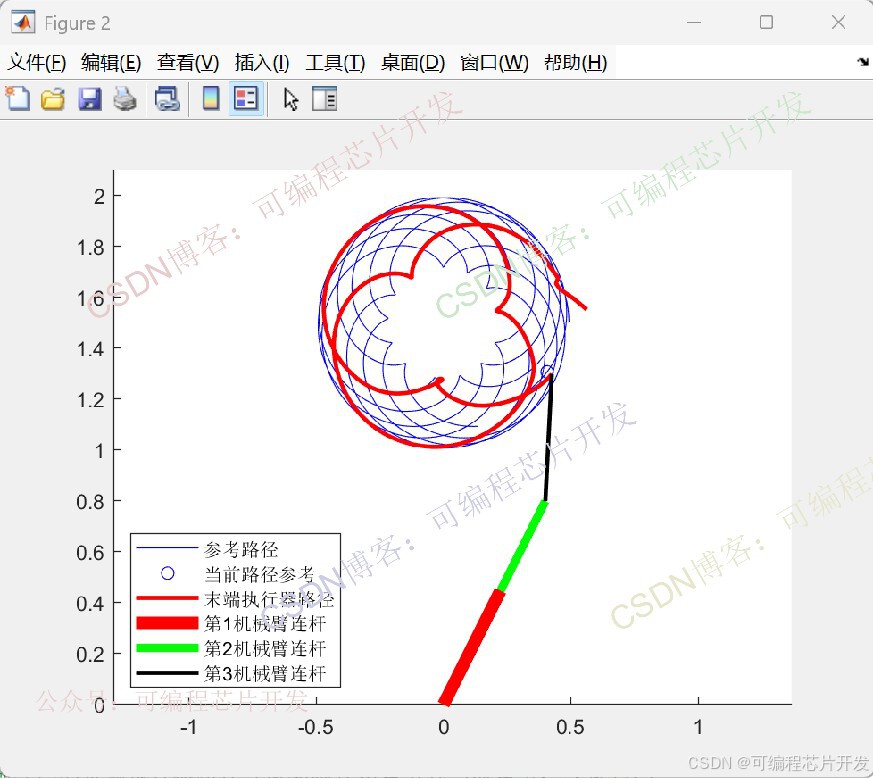
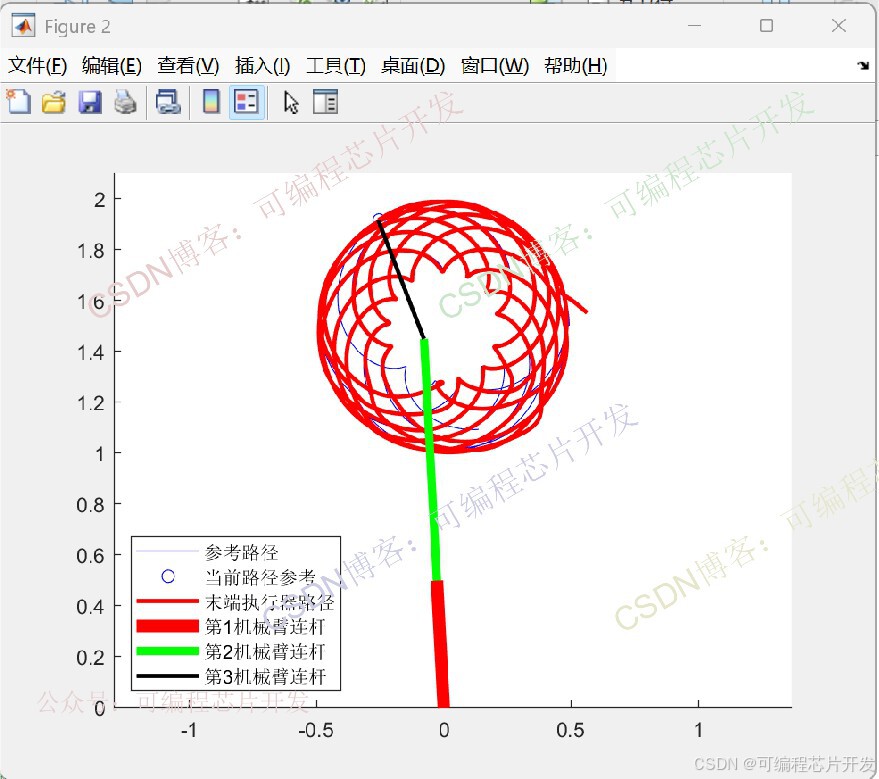
for n = S0:length(inverse1.Data(:,4))[n,length(inverse1.Data(:,4))]% 显示当前循环索引和总长度(用于跟踪进度)% 绘制y = x.^n的图像(注释可能与实际代码不完全匹配,此处为原注释保留)axis([-.75 1 0 2.1]) axis equal;hold on;% 绘制蓝色的参考路径(使用数据的第1列和第2列)plot(inverse1.Data(:,1), inverse1.Data(:,2), 'b');% 绘制当前路径参考点(蓝色圆圈标记)ref = plot(inverse1.Data(n,1), inverse1.Data(n,2),'bO');% 绘制红色的末端执行器路径(从动画开始索引到当前索引,线宽为2)plot(inverse1.Data(S0:n,4), inverse1.Data(S0:n,5), 'r', 'LineWidth',2);% 绘制第一机械臂连杆(从原点到第一个关节点,黑色,线宽为2)Link1 = line([0 inverse1.Data(n,10)], [0 inverse1.Data(n,11)],'Color','red', 'LineWidth',6);% 绘制第二机械臂连杆(从第一个关节点到第二个关节点,绿色,线宽为2)Link2 = line([inverse1.Data(n,10), inverse1.Data(n,7)],[inverse1.Data(n,11) inverse1.Data(n,8)],'Color', 'green', 'LineWidth',4);% 绘制第三机械臂连杆(从第二个关节点到末端执行器,黑色,线宽为2)Link3 = line([inverse1.Data(n,7), inverse1.Data(n,4)],[inverse1.Data(n,8) inverse1.Data(n,5)],'Color', 'black', 'LineWidth',2);legend('参考路径', '当前路径参考','末端执行器路径', '第1机械臂连杆', '第2机械臂连杆', '第3机械臂连杆', 'Location', 'southwest');hold off;drawnow if n<length(inverse1.Data(:,4))clfend
end
1234.系统原理简介
RPR机械臂手写器的物理结构由基座、三个关节、连杆及末端执行器(笔)组成,各部分功能如下:
基座:固定机械臂,为整个系统提供支撑;
关节1(R,旋转关节):绕基座垂直轴(Z轴)旋转,角度范围通常为-π~π,决定手写平面内的方位角;
连杆1:连接关节1与关节2,长度为L1(固定值),随关节1旋转;
关节2(P,移动关节):沿连杆1的径向(X 轴)伸缩,位移范围为d2∈[dmin,dmax],控制手写半径;
连杆2:连接关节2与关节3,长度为L2(固定值),末端安装关节3;
关节3(R,旋转关节):绕连杆2轴线旋转,角度范围为-π/2~π/2,控制末端笔的倾斜角度(确保书写方向与轨迹切线一致);
末端执行器:安装在关节3末端的笔,通过弹簧机构维持与书写平面的稳定接触力(通常为 5~10N)。
该结构的优势是:通过R-P-R的组合,可在平面内实现任意位置(x,y)的到达及任意姿态(笔的倾斜角)的调整,满足手写对位置精度(±0.1mm)和姿态连续性的要求。
运动学是机械臂控制的核心,分为正运动学(已知关节参数求末端位姿)和逆运动学(已知末端位姿求关节参数)。对于RPR模型,末端执行器的位姿由三个关节参数决定:
关节1旋转角θ1(单位:rad);
关节2位移d2(单位:m);
关节3旋转角θ3(单位:rad)。
末端位姿用位置坐标(x,y)和姿态角φ(笔与X轴的夹角)描述,三者需满足严格的几何约束,为轨迹规划和控制提供数学基础。
其DH参数表如下:

基于RPR模型的机械臂手写器通过“旋转-移动-旋转”的关节组合,实现了平面内高精度手写。其核心流程为:机械结构设计→运动学建模(正逆解)→字符轨迹生成→伺服控制→系统校准,各环节通过严格的数学公式保证精度与稳定性。
5.参考文献
[1]姚晔.鉴别Axidraw V3机械臂签名字迹与手写签名笔迹的实验研究[D].中国政法大学,2022.
6.完整工程文件
v