该程序通过点云预处理、差异检测和边界优化三阶段流程,实现路面坑洞的自动化识别与特征提取。
效果图
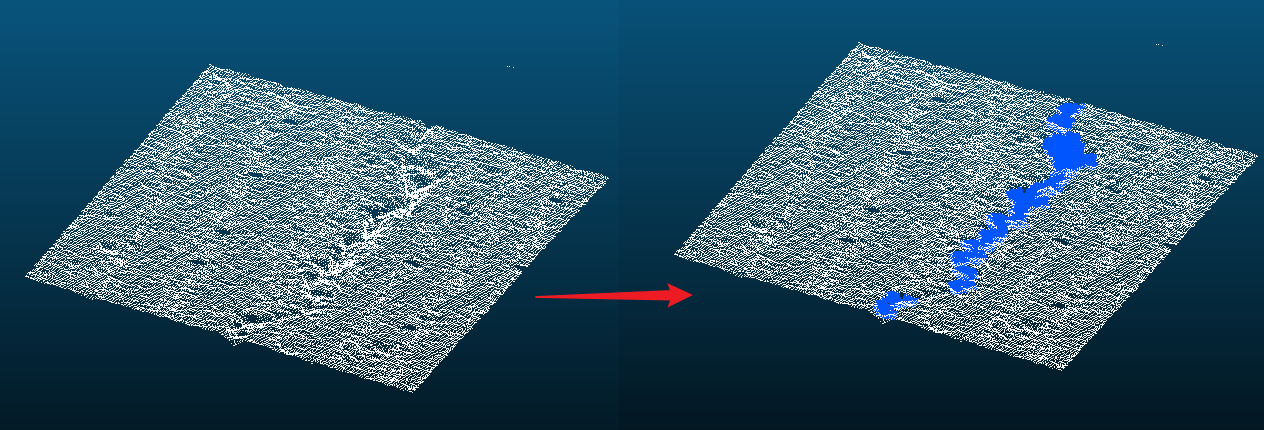
1. 系统整体流程
1.1 文件遍历与初始化
- 遍历指定路径下的点云文件
- 为每个文件创建独立的结果目录
- 初始化所有点为白色(RGB=255,255,255)
1.2 核心处理流程
- 体素化下采样
- 移动最小二乘平滑
- 点云差异检测
- 聚类滤波
- 球形搜索扩展
- 结果保存
2. 关键处理步骤详解
2.1 点云预处理
2.1.1 体素化下采样
- 使用体素网格过滤器降低点云密度
- 创建空间三维网格(体素尺寸2.0×2.0×2.0)
- 每个体素保留单个代表性点
- 减少后续计算复杂度
<