初识opencv02——图像预处理1
初识opencv
初识opencv01——基本api操作
文章目录
- 初识opencv
- 一、图像变换
- 1.1 图像翻转
- 1.2 仿射变换
- 1.2.1 图像旋转
- 1.2.2 图像平移
- 1.2.3 图像缩放
- 1.2.4 图像剪切
- 1.3 图像叠加
- 二、图像色彩空间
- 2.1 RGB
- 2.2 HSV
- 三、灰度化
- 3.1 灰度图
- 3.2 灰度化的常用方法
- 四、二值化
- 4.1 二值图像
- 4.2 阈值化与反阈值化
- 4.3 超阈值零处理与低阈值零处理
- 4.4 截断阈值法
- 4.5 OSTU阈值法
- 4.6 自适应阈值法
- 总结
一、图像变换
1.1 图像翻转
图像翻转是图像处理中基础但重要的操作,OpenCV通过cv2.flip()函数实现镜像翻转,常用于数据增强或图像对称性分析。
这里给出一份示例代码:
import cv2 as cvimg = cv.imread("cat.jpg")
# 水平翻转(左右镜像)
horizontal_flip = cv.flip(img, 1)
# 垂直翻转(上下翻转)
vertical_flip = cv.flip(img, 0)
# 同时水平和垂直翻转
both_flip = cv.flip(img, -1) cv.imshow("Original", img)
cv.imshow("Horizontal Flip", horizontal_flip)
cv.imshow("Vertical Flip", vertical_flip)
cv.waitKey(0)
其中所使用的api为:
- cv2.flip(img,flipcode)
在OpenCV中,图片的镜像旋转是以图像的中心为原点进行镜像翻转的。参数img为要翻转的图像,flipcode为指定翻转类型的标志。
- flipcode=0: 垂直翻转,图片像素点沿x轴翻转
- flipcode>0: 水平翻转,图片像素点沿y轴翻转
- flipcode<0: 水平垂直翻转,水平翻转和垂直翻转的结合
1.2 仿射变换
仿射变换(Affine Transformation)是一种线性变换,保持了点之间的相对距离不变,具体来说就是变换后直线仍旧是直线,平行线依旧是平行线,线段间比例不变。
在opencv中仿射变换所使用的api为cv2.warpAffine()函数,用法如下:
cv2.warpAffine(img,M,dsize)
- img:输入图像。
- M:2x3的变换矩阵,类型为
np.float32。- dsize:输出图像的尺寸,形式为
(width,height)。
- 变换矩阵
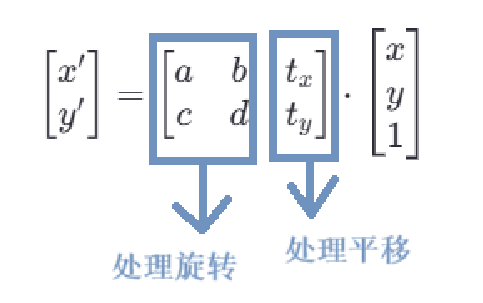
在二维空间中,图像点坐标为(x,y)(x,y)(x,y),仿射变换的目标是将这些点映射到新的位置(x′,y′)(x', y')(x′,y′),仿射变换是一种线性变换,类似于x′=kx+bx'=kx+bx′=kx+b。为了实现这种映射,通常会使用一个矩阵乘法的形式:
[x′y′1]=[abtxcdty001]∗[xy1]\left[\begin{array}{l l}{{x'}}\\{{y'}}\\{{1}}\end{array}\right]=\left[\begin{array}{l l}{{a~~~~b~~~~tx}}\\{{c~~~~d~~~~ty}}\\{{0~~~~0~~~~1}}\\ \end{array}\right]*\left[\begin{array}{c}{{x}}\\{{y}}\\{{1}}\end{array}\right] x′y′1=a b txc d ty0 0 1∗xy1
其中[abtxcdty001]\left[\begin{array}{ll}{{a~~~~b~~~~tx}}\\{{c~~~~d~~~~ty}}\\{{0~~~~0~~~~1}}\\ \end{array}\right]a b txc d ty0 0 1即为变换矩阵,其第三行并不参与变换,去掉后[abtxcdty]\left[\begin{array}{ll}{{a~~~~b~~~~tx}}\\{{c~~~~d~~~~ty}}\\\end{array}\right][a b txc d ty],即可作为函数cv2.warpAffine(img,M,dsize)的参数使用
- 齐次坐标
将[xy]\left[\begin{array}{c}{{x}}\\{{y}}\end{array}\right][xy]扩展为[xy1]\left[\begin{array}{c}{{x}}\\{{y}}\\{{1}}\end{array}\right]xy1,这种扩展后的坐标称之为齐次坐标。这种形式能够同时统一旋转、平移、缩放、剪切这四种变换。
既然变换矩阵的第三行不参与变换,那为什么还需要写成这种形式呢?
而将[abtxcdty]\left[\begin{array}{ll}{{a~~~~b~~~~tx}}\\{{c~~~~d~~~~ty}}\\\end{array}\right][a b txc d ty]扩展为[abtxcdty001]\left[\begin{array}{ll}{{a~~~~b~~~~tx}}\\{{c~~~~d~~~~ty}}\\{{0~~~~0~~~~1}}\\ \end{array}\right]a b txc d ty0 0 1,能够使原来的2*3矩阵变为方阵,这样就可以可求解矩阵的逆,也即是该变换的逆变换。
常见仿射变换有以下几种:
1.2.1 图像旋转
在计算机中所有图像都由像素点组成,故在此先探究单个点绕中心旋转的情况。
令旋转中心为坐标系中心O(0,0),假设有一点P0(x0,y0)P_{0}(x_{0},y_{0})P0(x0,y0),P0P_{0}P0离旋转中心O的距离为r,OP0OP_{0}OP0与坐标轴x轴的夹角为α\alphaα,P0P_{0}P0绕O顺时针旋转θ\thetaθ角后对应的点为P(x,y)P(x,y)P(x,y)。
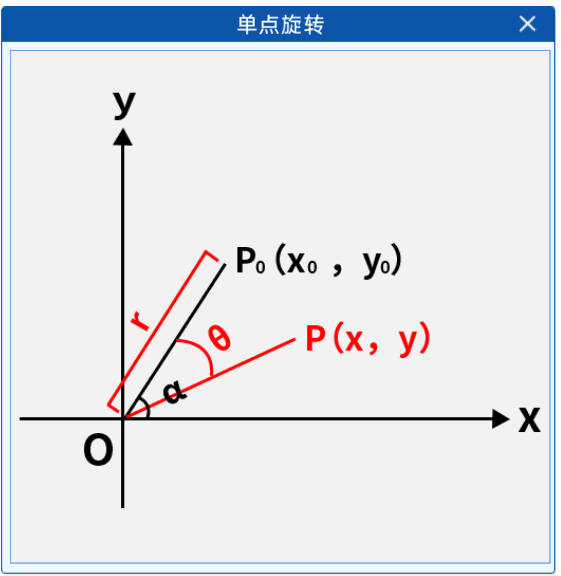
以极坐标形式表示坐标可得:
x0=r×cosαx_{0}=r\times\cos\alphax0=r×cosα,y0=r×sinαy_{0}=r\times\sin\alphay0=r×sinα
x=r×cos(α−θ)=rcosαcosθ+rsinαsinθ=x0cosθ+y0sinθx=r\times\cos(\alpha-\theta)=r\cos\alpha\cos\theta+r\sin\alpha\sin\theta=x_{0}\cos\theta+y_{0}\sin\thetax=r×cos(α−θ)=rcosαcosθ+rsinαsinθ=x0cosθ+y0sinθ
y=r×sin(α−θ)=rsinαcosθ−rcosαsinθ=−x0sinθ+y0cosθy=r\times\sin(\alpha-\theta)=r\sin\alpha\cos\theta-r\cos\alpha\sin\theta=-x_{0}\sin\theta+y_{0}\cos\thetay=r×sin(α−θ)=rsinαcosθ−rcosαsinθ=−x0sinθ+y0cosθ
用矩阵来表示就是:
[xy]=[cosθsinθ−sinθcosθ]∗[x0y0]\left[\begin{array}{l l}{{x}}\\{{y}}\end{array}\right]=\left[\begin{array}{l l}{{\cos\theta~~~~\sin\theta}}\\{{-\sin\theta~~~~\cos\theta}}\\ \end{array}\right]*\left[\begin{array}{c}{{x_{0}}}\\{{y_{0}}}\end{array}\right] [xy]=[cosθ sinθ−sinθ cosθ]∗[x0y0]
然而,在OpenCV中,旋转时是以图像的左上角为旋转中心,且以逆时针为正方向,因此上面的例子中其实是个负值,那么该矩阵可写为:
[xy]=[cosθ−sinθsinθcosθ]∗[x0y0]\left[\begin{array}{l l}{{x}}\\{{y}}\end{array}\right]=\left[\begin{array}{l l}{{\cos\theta~~~~-\sin\theta}}\\{{\sin\theta~~~~\cos\theta}}\\ \end{array}\right]*\left[\begin{array}{c}{{x_{0}}}\\{{y_{0}}}\end{array}\right] [xy]=[cosθ −sinθsinθ cosθ]∗[x0y0]
若需要围绕任意点进行旋转。那么我们可以将其转化成绕原点的旋转,其过程为:
- 首先将旋转点移到原点
- 按照上面的旋转矩阵进行旋转得到新的坐标点
- 再将得到的旋转点移回原来的位置
1.2.2 图像平移
平移操作即是将图像中的每个点沿着某个方向移动一定的距离。假设我们有一个点 P(x,y)P(x,y)P(x,y),希望将其沿x轴方向平移txt_xtx个单位,沿y轴方向平移tyt_yty个单位到新的位置P′(x′,y′)P′(x′,y′)P′(x′,y′),那么平移公式如下:
x′=x+tx,y′=y+tyx′=x+tx,y′=y+ty x′=x+tx,y′=y+ty
在矩阵形式下,该变换可以表示为:
[x′y′]=[10tx01ty]∗[xy1]\left[\begin{array}{l l}{{x'}}\\{{y'}}\end{array}\right]=\left[\begin{array}{l l}{{1~~~~0~~~~tx}}\\{{0~~~~1~~~~ty}}\\ \end{array}\right]*\left[\begin{array}{c}{{x}}\\{{y}}\\{{1}}\end{array}\right][x′y′]=[1 0 tx0 1 ty]∗xy1
这里的txt_xtx和tyt_yty分别代表在x轴和y轴上的平移量。
1.2.3 图像缩放
缩放操作可以改变图片的大小。设图像的宽高所对应的缩放因子分别为sx,sy则
点P(x,y)P(x,y)P(x,y)对应到新的位置P′(x′,y′)P'(x',y')P′(x′,y′),缩放公式为:
x′=sx∗x,y′=sy∗yx′=s_x*x,y′=s_y*yx′=sx∗x,y′=sy∗y
在矩阵形式下,该变换可以表示为:
[x′y′]=[sx000sy0]∗[xy1]\left[\begin{array}{l l}{{x'}}\\{{y'}}\end{array}\right]=\left[\begin{array}{l l}{{sx~~~~0~~~~0}}\\{{0~~~~sy~~~~0}}\\ \end{array}\right]*\left[\begin{array}{c}{{x}}\\{{y}}\\{{1}}\end{array}\right][x′y′]=[sx 0 00 sy 0]∗xy1
1.2.4 图像剪切
剪切操作可以改变图形的形状,以便其在某个方向上倾斜,它将对象的形状改变为斜边平行四边形,而不改变其面积。
对于二维空间中的点P(x,y)P(x,y)P(x,y),对他进行剪切变换:
沿x轴剪切:x′=x+shy∗yx'=x+sh_y*yx′=x+shy∗y
沿y轴剪切:y′=shx∗x+yy'=sh_x*x+yy′=shx∗x+y
在矩阵形式下,该变换可以表示为:
[x′y′]=[1sh0sh10]∗[xy1]\left[\begin{array}{l l}{{x'}}\\{{y'}}\end{array}\right]=\left[\begin{array}{l l}{{1~~~~sh~~~~0}}\\{{sh~~~~1~~~~0}}\\ \end{array}\right]*\left[\begin{array}{c}{{x}}\\{{y}}\\{{1}}\end{array}\right][x′y′]=[1 sh 0sh 1 0]∗xy1
1.3 图像叠加
可以使用OpenCV的cv.add()函数把两幅图像相加,或者可以简单地通过numpy操作添加两个图像,如res = img1 + img2。两个图像应该具有相同的大小和类型。
**OpenCV加法和Numpy加法之间存在差异。OpenCV的加法是饱和操作,而Numpy添加是模运算。**
示例:OpenCV加法
import cv2 as cvimg1 = cv.imread("background.jpg")
img2 = cv.imread("overlay.jpg")# 确保两图尺寸一致
assert img1.shape == img2.shape, "图像尺寸需相同"# OpenCV加法(饱和操作)
result = cv.add(img1, img2)cv.imshow("OpenCV Add", result)
cv.waitKey(0)
也可使用**cv2.addWeighted(src1,alpha,src2,deta,gamma)**对图片进行加权叠加。
示例:Numpy加法
# Numpy加法(模运算)
result_np = img1 + img2cv.imshow("Numpy Add", result_np)
cv.waitKey(0)
二、图像色彩空间
2.1 RGB
RGB(Red, Green, Blue)是最常见的色彩空间,通过红、绿、蓝三原色通道的线性叠加表示颜色。在OpenCV中,图像默认以BGR格式存储(通道顺序不同),需注意与标准RGB的差异。

2.2 HSV
HSV(Hue, Saturation, Value)色彩空间将颜色信息(色相H)、纯度(饱和度S)与亮度(明度V)分离,更适合颜色识别与分割。

三、灰度化
3.1 灰度图
灰度图(Grayscale Image)是每个像素仅表示亮度信息的单通道图像,像素值范围通常为0(黑)到255(白)。与彩色图像相比,灰度图丢失了颜色信息,但保留了亮度结构。

灰度图常用于以下场景:
- 图像预处理 :边缘检测、轮廓提取的前置步骤(如Canny算子)。
- 特征提取 :减少计算量,提升文本识别、模板匹配效率。
- 医学成像 :CT/MRI图像的亮度直接反映组织密度。
这里给出一个获取灰度图像的示例代码:
import cv2 as cv# 读取彩色图像
img = cv.imread("color_image.jpg")
# 将BGR图像转换为灰度图
gray_img = cv.cvtColor(img, cv2.COLOR_BGR2GRAY) cv.imshow("Original", img)
cv.imshow("Grayscale", gray_img)
cv.waitKey(0)
3.2 灰度化的常用方法
灰度化本质是将三通道彩色值映射为单通道灰度值,常见方法包括平均法、加权平均法 和OpenCV内置函数 。
-
最大值法
取R、G、B三通道中的最大值:
Gray=Max(R,G,B)Gray= Max(R,G,B)Gray=Max(R,G,B) -
平均法
对R、G、B三通道取算术平均值:
Gray=R+G+B3Gray= \frac{R+G+B}{3}Gray=3R+G+B -
加权平均法
根据人眼对不同颜色的敏感度分配权重(如NTSC标准):
Gray=0.299R+0.587G+0.114BGray=0.299R+0.587G+0.114BGray=0.299R+0.587G+0.114B -
OpenCV内置函数
cv2.cvtColor()内部优化了颜色空间转换效率,推荐用于实际项目:
gray_cv = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
cv.imshow("OpenCV Grayscale", gray_cv)
四、二值化
4.1 二值图像
二值图像是指每个像素仅取两个值(通常为0和255)的图像,常用于图像分割、目标检测 等场景。通过二值化可将复杂图像简化为黑白两部分,突出目标与背景的边界。与灰度图一样,二值图为单通道图像,仅保留目标与背景的区分,丢失细节信息。
4.2 阈值化与反阈值化
-
阈值法
就是通过设置一个阈值,将灰度图中的每一个像素值与该阈值进行比较,小于等于阈值的像素就被设置为0(通常代表背景),大于阈值的像素就被设置为maxval(通常代表前景)。对于我们的8位图像(0~255)来说,通常是设置为255。 -
反阈值化
顾名思义,就是与阈值法相反。反阈值法是当灰度图的像素值大于阈值时,该像素值将会变成0(黑),当灰度图的像素值小于等于阈值时,该像素值将会变成maxval。
这里给出一个对比阈值化与反阈值化图像的示例代码:
import cv2 as cvgray_img = cv.imread("logo.jpg", 0)
# 阈值化
_, binary = cv.threshold(gray_img, 127, 255, cv.THRESH_BINARY)
# 反阈值化
_, binary_inv = cv.threshold(gray_img, 127, 255, cv.THRESH_BINARY_INV) cv.imshow("Original", gray_img)
cv.imshow("Binary", binary)
cv.imshow("Binary Inverse", binary_inv)
cv.waitKey(0)
4.3 超阈值零处理与低阈值零处理
- 超阈值零处理
就是将灰度图中的每个像素与阈值进行比较,像素值大于阈值的部分置为0(也就是黑色),像素值小于等于阈值的部分不变。
示例:
import cv2 as cv# 读取过曝图像
img = cv.imread("overexposed.jpg", 0)
# 设置阈值127,超阈值零处理
_, result = cv.threshold(img, 127, 255, cv.THRESH_TOZERO_INV) cv.imshow("Original", img)
cv.imshow("Threshold TOZERO_INV", result)
cv.waitKey(0)
- 低阈值零处理
字面意思,就是像素值小于等于阈值的部分被置为0(也就是黑色),大于阈值的部分不变。
示例:
import cv2 as cv# 读取暗背景图像
img = cv.imread("dark_background.jpg", 0)
# 设置阈值127,低阈值零处理
_, result = cv.threshold(img, 127, 255, cv2.THRESH_TOZERO) cv.imshow("Original", img)
cv.imshow("Threshold TOZERO", result)
cv.waitKey(0)
4.4 截断阈值法
截断阈值法,指将灰度图中的所有像素与阈值进行比较,像素值大于阈值的部分将会被修改为阈值,小于等于阈值的部分不变。换句话说,经过截断阈值法处理过的二值化图中的最大像素值就是阈值。
4.5 OSTU阈值法
也称大津法,是一种自动获取最佳阈值的方法。THRESH_OTSU 本身并不是一个独立的阈值化方法,而是与 OpenCV 中的二值化方法结合使用的一个标志,默认情况下它会与 THRESH_BINARY 结合使用。
OTSU阈值法适用于双峰图片,双峰图片就是指灰度图的直方图上有两个峰值,直方图就是对灰度图中每个像素值的点的个数的统计图,如下图所示。

使用OTSU算法计算阈值时,组件中的thresh参数将不再有任何作用。
4.6 自适应阈值法
自适应阈值法(Adaptive Thresholding)通过为图像的每个局部区域动态计算阈值,解决光照不均 或复杂背景 下的图像分割问题。与全局阈值法(如OSTU)不同,它能适应不同区域的亮度变化,常用于文档扫描、手写识别 等场景。
- 取均值(ADAPTIVE_THRESH_MEAN_C)
阈值 T(x,y) 为局部区域像素的平均值减去常数 C ,适用于光照变化较均匀 的场景。
这里给出一个均值自适应阈值的示例代码:
import cv2 as cv# 读取灰度图像(如扫描文档)
gray_img = cv.imread("uneven_lighting_doc.jpg", 0)
# 均值自适应阈值(局部区域11x11,常数C=2)
binary_mean = cv.adaptiveThreshold(gray_img, 255, cv.ADAPTIVE_THRESH_MEAN_C, cv.THRESH_BINARY, blockSize=11, C=2) cv.imshow("Mean Adaptive Binary", binary_mean)
cv.waitKey(0)
- 加权求和(ADAPTIVE_THRESH_GAUSSIAN_C)
阈值 T(x,y) 为局部区域像素的高斯加权和减去常数 C ,权重由像素距离中心点的远近决定(距离越近权重越高)。
这里给出一个高斯加权自适应阈值的示例代码:
# 高斯加权自适应阈值(局部区域11x11,常数C=2)
binary_gaussian = cv2.adaptiveThreshold(gray_img, 255, cv2.ADAPTIVE_THRESH_GAUSSIAN_C, cv2.THRESH_BINARY, blockSize=11, C=2) cv2.imshow("Gaussian Adaptive Binary", binary_gaussian)
cv2.waitKey(0)
总结
本文介绍了OpenCV图像预处理的五大基础操作,这些方法是后续图像分析的重要基础。实际应用中可根据需求组合使用,并调整参数以获得最佳效果。