从密度到聚类:DBSCAN算法的第一性原理解析
从密度到聚类:DBSCAN算法的第一性原理解析
“如果你不能简单地解释它,说明你还没有完全理解它。” —— 理查德·费曼
一、📚引言:为什么需要基于密度的聚类?
想象你在夜空中观察星星。有些星星聚集成星座,有些散落各处,还有些形成了银河。如果让你对这些星星分组,你会怎么做?
🎯 第一性原理思考:聚类的本质是什么?
聚类就是找到数据的自然分组,让组内相似度高,组间相似度低。但"相似"可以有不同的定义:
- 距离相似:K-means关注的是到中心点的距离
- 密度相似:DBSCAN关注的是局部密度
传统的K-means算法假设簇是球形的,但现实世界的数据往往不是这样。DBSCAN应运而生,它能发现任意形状的簇。
二、DBSCAN的核心思想:密度定义一切
DBSCAN (Density-Based Spatial Clustering of Applications with Noise) 的核心洞察是:簇是高密度区域,由低密度区域分隔。
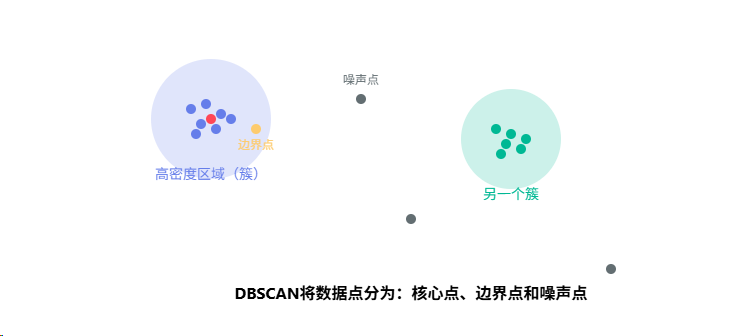
三、三种样本类型:核心、边界与噪声
🔥 用费曼的方式理解三种点
想象你在一个派对上:
- 🔴 核心样本(Core Point):派对中心的活跃分子,周围总是围着很多人(≥min_samples)
- 🟡 边界样本(Border Point):站在圈子边缘的人,虽然属于这个圈子,但自己周围人不多
- ⚫ 噪声样本(Noise Point):独自站在角落的人,既不在中心,也不属于任何圈子
数学定义
点p是核心点 ⟺ |N_ε§| ≥ min_samples
其中 N_ε§ = {q ∈ D | dist(p,q) ≤ ε}
简单说就是:
- 以p为中心、半径为ε的圆内,至少有min_samples个点(包括p自己)
四、算法原理:密度可达与密度相连
核心概念解析
- 直接密度可达:如果点p在点q的ε-邻域内,且q是核心点,则p从q直接密度可达
- 密度可达:存在一个点的序列p1, p2, …, pn,其中p1=q,pn=p,每个pi+1从pi直接密度可达
- 密度相连:如果存在点o,使得p和q都从o密度可达,则p和q密度相连
DBSCAN算法流程
def DBSCAN(D, eps, MinPts):"""D: 数据集eps: 邻域半径MinPts: 最小点数(min_samples)"""C = 0 # 簇计数器for P in D:if P.visited:continueP.visited = True# 获取P的ε-邻域NeighborPts = getNeighbors(P, eps)if len(NeighborPts) < MinPts:P.label = NOISE # 标记为噪声else:C += 1expandCluster(P, NeighborPts, C, eps, MinPts)return clusters
五、代码实现:从理论到实践
1. 训练阶段:发现簇结构
from sklearn.cluster import DBSCAN
import numpy as np# DBSCAN训练:使用预计算的距离矩阵
# 关键参数解释:
# eps: 邻域半径(派对圈子的大小)
# min_samples: 成为核心点的最小邻居数(活跃分子的标准)clustering_model = DBSCAN(eps=0.3, # 半径阈值min_samples=10, # 最小样本数metric='precomputed', # 使用预计算的距离矩阵n_jobs=4 # 并行计算
)# 拟合数据
clustering_model.fit(dist_mat)# 获取核心样本索引
core_indices = clustering_model.core_sample_indices_
print(f"发现了 {len(core_indices)} 个核心样本")# 查看簇的分布
unique_labels = set(clustering_model.labels_)
n_clusters = len(unique_labels) - (1 if -1 in unique_labels else 0)
print(f"簇的数量: {n_clusters}")
print(f"噪声点数量: {list(clustering_model.labels_).count(-1)}")
2. 预测阶段:为新样本分配簇标签

def dbscan_predict_text(model: DBSCAN, pre_datas: List[str], vectorizer: CountVectorizer, x: List[str]) -> np.ndarray:"""DBSCAN预测新样本的簇标签核心思想:1. 提取所有核心样本2. 计算新样本到核心样本的距离3. 如果最小距离 ≤ eps,归属到对应簇4. 否则标记为噪声(-1)参数:model: 训练好的DBSCAN模型pre_datas: 聚类时用到的所有数据vectorizer: 文本向量化器x: 待预测的新样本返回:预测的簇标签数组"""# 获取核心样本(簇的代表)components = [pre_datas[i] for i in model.core_sample_indices_]# 特征转换components_feat = vectorizer.transform(components)x_feat = vectorizer.transform(x)# 计算距离矩阵(使用Jaccard距离)dist_mat = 1 - jaccard_similarity_sparse(x_feat, components_feat).toarray()# 找最近的核心点shortest_dist_idx = dist_mat.argmin(axis=1) # x对应距离最近的components# 取距离最近的components对应的clustery_new = model.labels_[model.core_sample_indices_[shortest_dist_idx]]# 距离大于eps则置-1(噪声)y_new = np.where(dist_mat.min(axis=1) < model.eps, y_new, -1)return y_new
3. 简化版预测实现
def dbscan_predict_simple(model, X_new, X_train, eps):"""简化版DBSCAN预测"""# 获取核心样本core_indices = model.core_sample_indices_core_samples = X_train[core_indices]# 计算距离distances = compute_distances(X_new, core_samples)# 找最近的核心点min_distances = distances.min(axis=1)nearest_core_idx = distances.argmin(axis=1)# 分配标签y_pred = np.full(len(X_new), -1) # 默认噪声mask = min_distances <= epsy_pred[mask] = model.labels_[core_indices[nearest_core_idx[mask]]]return y_pred
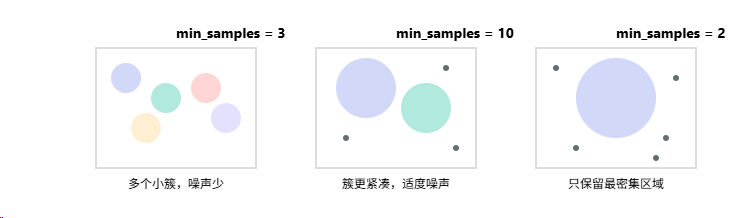
六、参数调优:min_samples的影响
参数影响对比
| min_samples值 | 密度门槛 | 核心点数量 | 簇的特征 | 适用场景 |
|---|---|---|---|---|
| 较小 (3-5) | 低 | 多 | 多个小簇,链状结构 | 发现微小模式 |
| 中等 (10-15) | 中 | 适中 | 平衡的簇大小 | 一般用途 |
| 较大 (20+) | 高 | 少 | 只保留高密度核心 | 强噪声过滤 |
🎯 参数选择经验法则
- min_samples ≈ 维度 + 1:这是最小值,保证在d维空间中形成有意义的邻域
- min_samples ≈ 2 × 维度:对于高维稀疏数据的推荐值
- eps的选择:使用k-距离图,找到"肘点"
# eps参数选择:k-距离图方法
from sklearn.neighbors import NearestNeighborsdef plot_k_distance(X, k):"""绘制k-距离图,帮助选择eps"""nbrs = NearestNeighbors(n_neighbors=k).fit(X)distances, indices = nbrs.kneighbors(X)# 获取第k个最近邻的距离k_distances = distances[:, k-1]k_distances = np.sort(k_distances)# 绘图plt.plot(k_distances)plt.ylabel(f'{k}-NN Distance')plt.xlabel('Data Points sorted by distance')plt.title('K-distance Graph')plt.show()# 使用方法:观察曲线的"肘点"作为eps的参考值
plot_k_distance(X, k=min_samples)
七、高级话题:核心样本的分布分析
统计每个簇的核心样本数
from collections import Counter# 获取核心样本的簇标签
core_labels = model.labels_[model.core_sample_indices_]# 统计分布
core_count = Counter(core_labels)
for cluster_id, count in sorted(core_count.items()):if cluster_id != -1: # 排除噪声print(f"簇 {cluster_id}: {count} 个核心样本")# 分析簇的密度特征
total_samples_per_cluster = Counter(model.labels_)
for cluster_id in core_count:if cluster_id != -1:density = core_count[cluster_id] / total_samples_per_cluster[cluster_id]print(f"簇 {cluster_id} 的核心密度: {density:.2%}")
💡 关键洞察
核心样本数量反映了簇的"密度质量":
- 核心样本占比高 → 簇内部紧密,质量好
- 核心样本占比低 → 簇较松散,可能包含较多边界点
- 没有核心样本 → 不可能形成簇(这是DBSCAN的基本原理)
八、DBSCAN vs K-means:本质区别
| 特征 | DBSCAN | K-means |
|---|---|---|
| 基本假设 | 簇是高密度区域 | 簇是球形分布 |
| 簇的形状 | 任意形状 | 凸形(球形) |
| 簇的数量 | 自动发现 | 需要预设 |
| 噪声处理 | 自然识别噪声 | 强制分配到簇 |
| 参数敏感性 | 对eps和min_samples敏感 | 对初始中心敏感 |
| 计算复杂度 | O(n²)最坏情况,O(nlogn)使用索引 | O(nkt),t是迭代次数 |
九、常见问题与解答
Q1: 每个簇的核心样本数是固定的吗?
不是固定的。min_samples只是判断一个点是否是核心样本的阈值。每个簇里究竟有多少核心样本,取决于该簇的密度分布:
- 若某簇内部点非常稠密,几乎每个点的邻居都 ≥ min_samples,那么这个簇会有很多核心样本
- 若另一簇比较"松散",只有少数几个点周围才够得上min_samples,那它的核心点就比较少
Q2: 如果没有噪声,是不是所有样本都是核心样本?
不一定。没有噪声只说明每个点都能"可达"到某个核心点,但并不意味着它本身就是核心样本。簇的外围那些与核心区连接但邻居 < min_samples的点,虽然被归到该簇(作为边界点),却不是核心样本。
Q3: 边界样本和核心样本的区别是什么?
核心区域(密集)●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●●● ← 核心样本(周围点≥min_samples)●●●●●●●●●●○○○○○ ← 边界样本(在核心点邻域内,但自己不是核心)○○○· ← 噪声(既不是核心,也不在核心邻域内)
十、实战技巧总结
1. 数据预处理
# 对于文本数据,使用合适的距离度量
from sklearn.feature_extraction.text import TfidfVectorizervectorizer = TfidfVectorizer(max_features=5000)
X = vectorizer.fit_transform(texts)# 计算距离矩阵
from sklearn.metrics.pairwise import cosine_distances
dist_matrix = cosine_distances(X)
2. 参数网格搜索
# 参数优化
from sklearn.metrics import silhouette_scorebest_score = -1
best_params = {}for eps in np.arange(0.1, 1.0, 0.1):for min_samples in range(5, 20, 5):db = DBSCAN(eps=eps, min_samples=min_samples)labels = db.fit_predict(X)# 忽略噪声点计算轮廓系数if len(set(labels)) > 1:score = silhouette_score(X[labels != -1], labels[labels != -1])if score > best_score:best_score = scorebest_params = {'eps': eps, 'min_samples': min_samples}print(f"最佳参数: {best_params}")
print(f"轮廓系数: {best_score}")
3. 可视化结果
import matplotlib.pyplot as plt
from sklearn.decomposition import PCA# 降维可视化
pca = PCA(n_components=2)
X_reduced = pca.fit_transform(X.toarray())# 绘制聚类结果
plt.figure(figsize=(10, 8))
unique_labels = set(labels)
colors = plt.cm.Spectral(np.linspace(0, 1, len(unique_labels)))for k, col in zip(unique_labels, colors):if k == -1:col = 'black' # 噪声用黑色marker = 'x'else:marker = 'o'class_members = labels == kplt.scatter(X_reduced[class_members, 0], X_reduced[class_members, 1],c=[col], marker=marker, s=50, label=f'Cluster {k}')plt.title('DBSCAN Clustering Results')
plt.legend()
plt.show()
十一、总结:DBSCAN的第一性原理
🎯 核心原理回顾
- 密度定义簇:高密度区域形成簇,低密度区域是边界
- 局部视角:只看ε-邻域,不需要全局信息
- 三元分类:每个点必然是核心、边界或噪声之一
- 密度可达:通过核心点的连接定义簇的扩展
🌟 记住这个类比
DBSCAN就像在地图上找城市:
- 人口密集的地方是城市中心(核心点)
- 郊区是城市边缘(边界点)
- 荒野中的孤立房屋(噪声点)
eps决定了"城市"的范围,min_samples决定了多密集才算"市中心"。
十二、展望与扩展
DBSCAN的局限性
- 密度不均:当不同簇的密度差异很大时,单一的eps难以适应
- 高维诅咒:在高维空间中,距离度量失效,密度概念变得模糊
- 参数选择:eps和min_samples的选择仍需经验和实验
改进算法
- HDBSCAN:层次化DBSCAN,自动选择eps
- OPTICS:排序点识别聚类结构,生成可达性图
- Mean Shift:另一种基于密度的方法,使用核密度估计
应用场景
- 异常检测:噪声点天然就是异常
- 图像分割:发现任意形状的目标
- 客户细分:发现自然的客户群体
- 地理数据分析:识别热点区域
学习的最好方法是教授,实践的最好方法是创造。
理解了原理,下一步就是动手实践。希望这篇文章能帮助你真正理解DBSCAN不仅是"如何工作",更重要的是"为什么这样工作"。
参考资源
- DBSCAN原论文
- Scikit-learn DBSCAN文档
- HDBSCAN项目