AAAI爆款:目标检测新范式,模块化设计封神之作
本文选自gongzhonghao【图灵学术SCI论文辅导】
关注我们,掌握更多顶会顶刊发文资讯
今天,为大家推荐一个兼具前沿性与实用价值的研究方向:目标检测。
从近年顶会论文和工业落地的双重热度来看,该方向仍是智能感知领域的核心焦点,尤其在自动驾驶实时环境感知、工业质检缺陷定位、医疗影像病灶分析等垂直场景中,持续推动技术边界的突破。目标检测通过融合轻量化架构设计、跨模态关联增强以及动态环境适应机制,提升了复杂场景下的检测精度与系统鲁棒性。其技术通用性更在安防监控、农业无人机巡检、智能零售等多样化领域展现强大潜力,无论是学术创新性还是产业落地价值,均具备可观的发展空间和持续的生命力。
今天小图给大家精选3篇AAAI有关目标检测方向的论文,请注意查收!
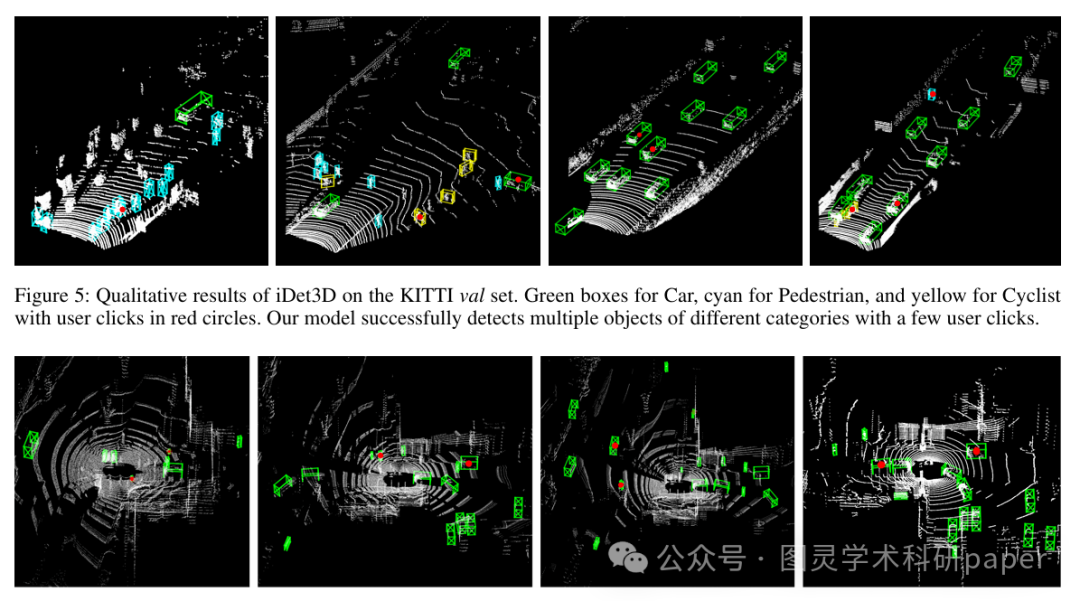
iDet3D: Towards Efficient Interactive Object Detection for LiDAR Point Clouds
方法:
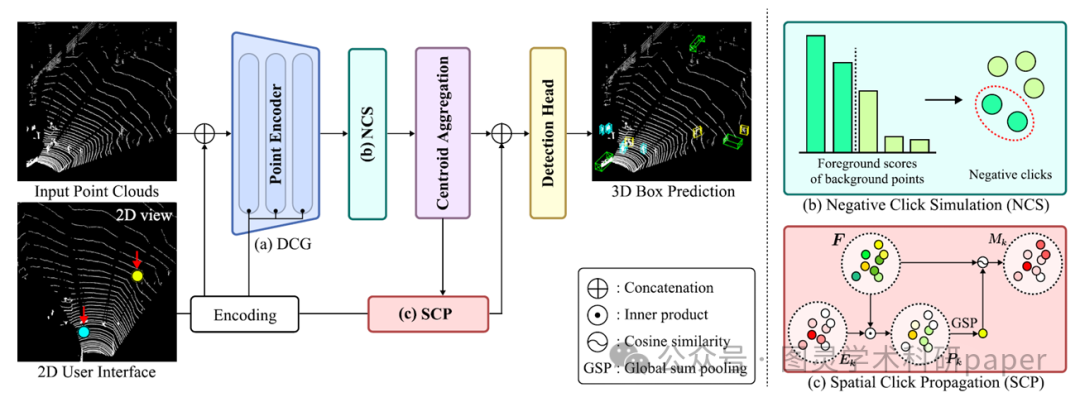
该方法首先将用户在2D界面上提供的点击转化为距离热图,并生成类别编码,然后将这些编码与输入点云进行拼接,并利用密集点击引导(DCG)将信息融合到网络深层。在此基础上,通过负点击模拟(NCS)策略,在训练时选择易错判为前景的背景点作为负点击进行编码以减少误报,最后,通过空间点击传播(SCP)模块基于特征相似性将用户点击传播至场景中同类别的其他物体,最终由检测头进行3D边界框预测。
创新点:
提出了负点击模拟(NCS),通过在训练时模拟具有高前景分数但实为背景点的“负点击”,有效减少了错误预测。
引入了密集点击引导(DCG),将编码后的点击信息不仅融合到输入点云中,也融合到编码器的中间层,以确保用户意图在整个网络中得到有效保留。
设计了空间点击传播(SCP)模块,通过计算特征嵌入之间的相似性,将用户对单一物体的点击有效地传播到同一类别中其他未被点击的物体上,大大提高了标注效率。
论文链接:
https://ojs.aaai.org/index.php/AAAI/article/view/27897
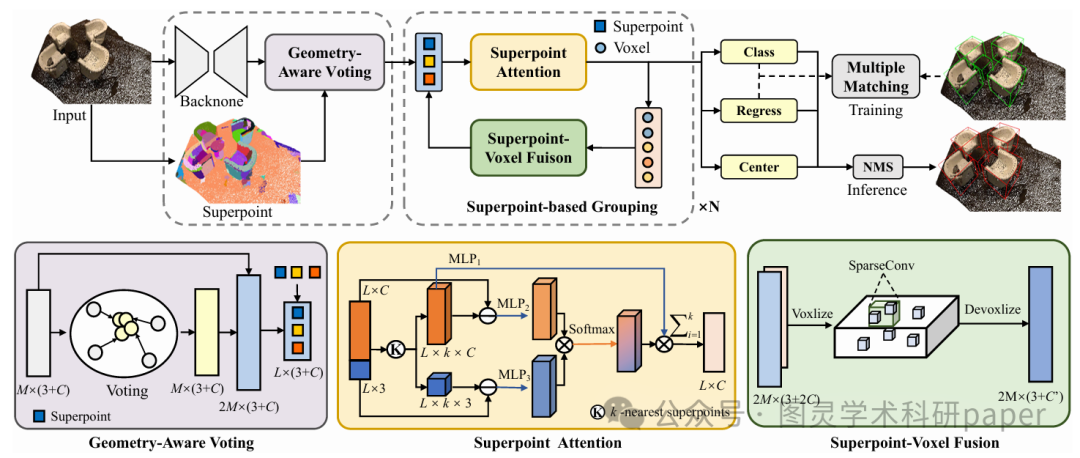
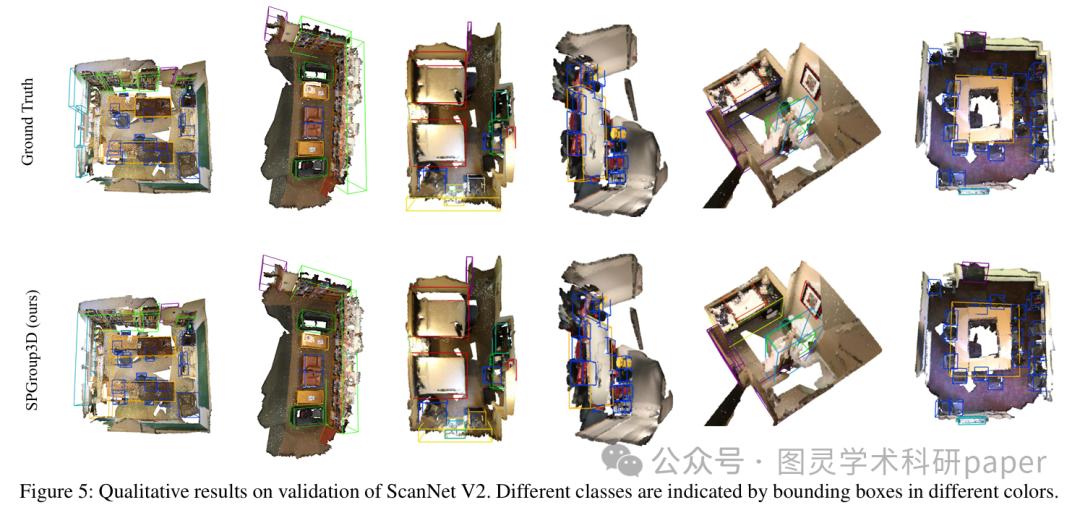
SPGroup3D: Superpoint Grouping Network for Indoor 3D Object Detection
方法:
该方法首先通过稀疏卷积骨干网络提取体素,并利用几何感知投票模块融合种子体素与投票体素,以保留超点相对于物体中心的几何位置信息。接着,通过包含超点注意力与超点-体素融合的超点分组模块,迭代地增强超点特征表示并实现粗粒度超点与细粒度体素之间的信息交互。最后,在训练阶段采用多重匹配策略,通过同时考虑分类和回归损失来为每个真值目标选择多个正样本。
创新点:
引入了几何感知投票模块,通过保留超点与物体中心之间的相对几何关系来适应无锚点检测。
设计了基于超点的分组模块,通过超点注意力层和超点-体素融合层来实现超点间及超点与体素间的信息交互。
提出了一种多重匹配策略,可以在训练过程中根据动态感受野的超点来有效筛选出正样本。
论文链接:
https://ojs.aaai.org/index.php/AAAI/article/view/28616
UN-DETR: Promoting Objectness Learning via Joint Supervision for Unknown Object Detection
方法:
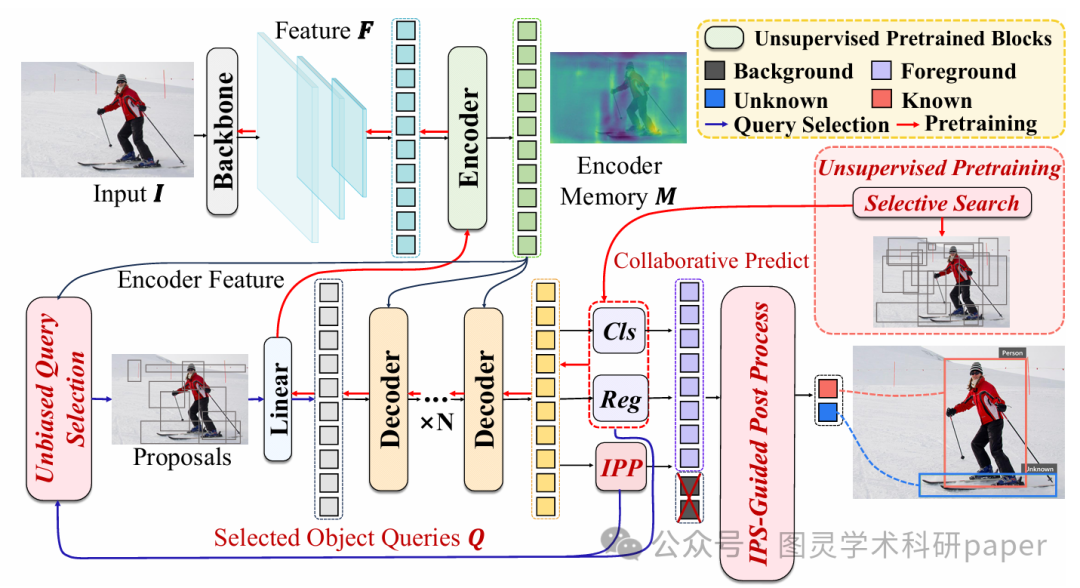
UN-DETR模型首先通过一个骨干网络和编码器提取图像特征,然后通过其专有的IPS预测器、分类头和回归头处理这些特征,得到预测的边界框和IPS;为了训练IPS预测器,作者采用了一种联合监督策略,将来自位置和类别潜在空间的通用物体特征属性作为监督信号,并通过L1损失进行优化;最后,利用IPS引导的后处理步骤,根据IPS和分类置信度来筛选最终的检测结果,并通过无监督预训练获取物体先验知识,进一步增强模型的泛化能力。
创新点:
提出了实例存在分数(IPS)机制,将互补的位置信息和类别信息相结合,为通用物体特征的学习提供联合监督信号。
引入了一种“一对多”的分配策略来提供更多正样本,以增强IPS的学习,并提出了无偏查询选择,用IPS预测器取代传统的分类头,以优化初始查询向量。
设计了IPS引导的后处理策略,利用IPS来过滤冗余边界框并区分已知和未知物体,同时在无监督预训练阶段获取物体先验知识以提升模型的泛化能力。
论文链接:
https://doi.org/10.1609/aaai.v39i5.32579
本文选自gongzhonghao【图灵学术SCI论文辅导】
关注我们,掌握更多顶会顶刊发文资讯