智驾系统架构解析
汽车智驾域软件设计总结
一段话总结
本文围绕汽车智驾域软件设计展开,详细阐述了Autosar 规范下 ADAS 功能的 VMC 分层架构,涵盖传感器数据采集融合、ADAS 应用层、ADAS 管理器层、车辆管理层和执行器层等核心层级,介绍了ACC、AEB 和 LKA 三个典型 ADAS 应用的软件架构设计,明确了各层接口标准化及数据交互规则,还涉及车辆坐标系定义、传感器信号类型等基础概念,为理解汽车智驾域软件的运行逻辑与架构设计提供了全面参考。
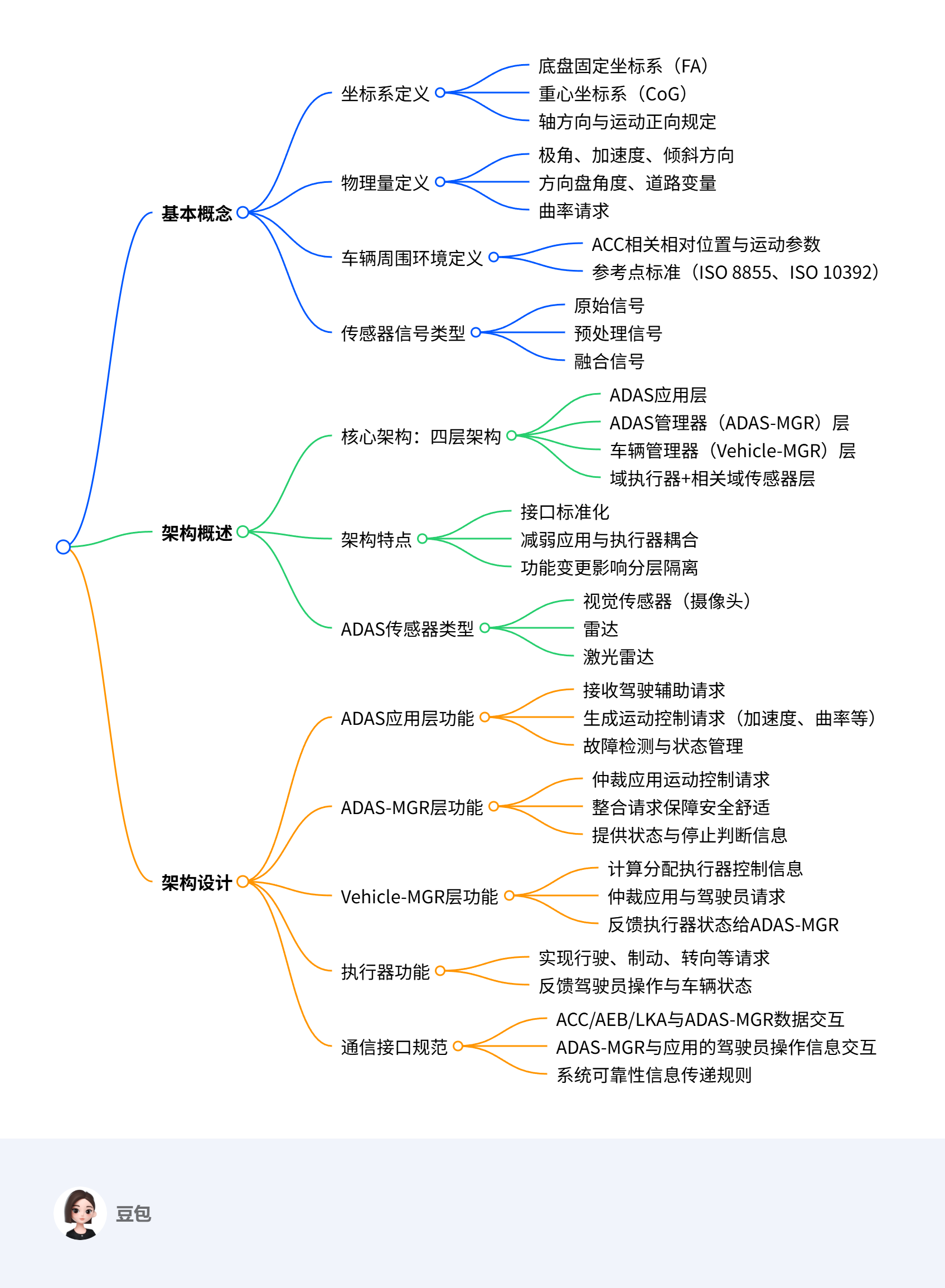
思维导图
详细总结
一、基本概念
- 坐标系定义
-
底盘固定坐标系(FA):原点位于前轴(FA)中间,x 轴正向为汽车前方,y 轴正向为汽车左侧,z 轴正向为汽车上方。
-
重心坐标系(CoG):原点为汽车重心,相对 FA 坐标系定位,轴方向与 FA 坐标系一致。
-
运动正向规定:左转弯车身右侧倾斜为侧倾正方向,刹车车身向前倾斜为俯仰正方向,左转弯为偏航正方向;极角 ϕ 逆时针为正,方向盘向左转动为正,倾斜左高右低为正。
- 核心物理量
-
道路变量:包括道路曲率、偏航角、车道中心线、左右车道边缘、偏移量等,用于描述道路状况。
-
曲率请求:基于车辆期望轨迹计算,相对重心(CoG)定义,如 LKA 目标轨迹的曲率请求。
-
车辆周围环境参数:ACC 中涉及纵向 / 横向相对距离、速度、加速度,目标方向 α 等,参考点遵循 ISO 8855(自身车辆)和 ISO 10392 标准。
- 传感器信号类型
-
原始信号:未经预处理的传感器数据。
-
预处理信号:抽象的传感器硬件数据。
-
融合信号:多个传感器信号处理后生成的综合信号。
二、架构概述
-
ADAS 传感器组成:包括视觉传感器(如摄像头)、雷达和激光雷达,用于监测周围环境,将原始或预处理信号发送至融合层,融合层识别环境状况后传递给 ADAS 应用层。
-
四层架构体系
| 层级 | 名称 | 核心功能 |
|---|---|---|
| 1 | ADAS 应用层 | 接收驾驶辅助请求,生成运动控制请求(纵向加速度 / 减速度、曲率等),执行故障检测与状态管理 |
| 2 | ADAS 管理器(ADAS-MGR)层 | 仲裁各应用运动控制请求,整合请求保障安全舒适,向车辆管理器发送控制命令,提供状态与停止判断信息 |
| 3 | 车辆管理器(Vehicle-MGR)层 | 计算分配执行器控制信息,仲裁应用与驾驶员请求,反馈执行器状态给 ADAS-MGR |
| 4 | 域执行器 + 相关域传感器层 | 实现行驶、制动、转向等运动请求,反馈驾驶员操作(油门、制动、方向盘)和车辆状态信息 |
- 架构优势:各层接口标准化,减弱 ADAS 应用程序和执行器之间的耦合关系,ADAS 功能变更仅在 ADAS-MGR 层处理,执行器变更不影响上层逻辑。
三、架构设计细节
- ADAS 应用层关键功能
-
典型应用:ACC(自适应巡航控制)、AEB(自动紧急制动)、LKA(车道保持辅助)。
-
核心操作:根据用户界面请求生成运动控制请求(如 ACC 的加速度请求、LKA 的曲率请求),进行状态管理(ON/OFF/STANDBY 等)和故障诊断。
- ADAS-MGR 层核心职责
-
请求仲裁:优先选择纵向加速度请求,生成目标纵向加速度,确定转向辅助扭矩上下限。
-
信息交互:向应用层提供驾驶员操作信息、执行器状态、功能停止判断元素;向车辆管理器发送运动控制命令。
- Vehicle-MGR 层功能要点
-
控制实现:将 ADAS-MGR 的运动控制命令转化为执行器具体控制信息,如驾驶加速度、制动加速度、横摆率。
-
状态处理:解析执行器和车辆传感器状态,进行扭矩分配(动力系统和制动系统)。
-
执行器功能范畴:响应驾驶员和 Vehicle-MGR 的运动请求,反馈油门踏板、制动踏板、方向盘的操作状态及车辆行驶、制动、转向、动量状态。
-
通信接口规范(部分关键接口)
| 数据名称 | 输出源 | 输出目标 | 单位 | 核心说明 |
|---|---|---|---|---|
| ACC 目标加速度 | ACC | AMG | m/s² | 保障 ACC 性能的目标加速度,初始值 0 |
| AEB 目标加速度 | AEB | AMG | m/s² | 保障 AEB 性能的目标加速度,初始值 0 |
| LKA 目标曲率 | LKA | AMG | 1/m | LKA 的目标曲率,初始值 0 |
| 驾驶员驾驶操作 override | AMG | ACC/AEB/LKA | - | 0: 未定义,1: 未操作,2: 操作,初始值 0 |
| PT 系统可靠性信息 | AMG | ACC/AEB/LKA | - | 0: 初始化,1: 校准中,2: 正常,3: 保护控制中,4: 无效,5: 故障等 |
关键问题
-
问题:ADAS 系统的四层架构中,各层之间如何通过接口设计实现耦合减弱?
答案:ADAS 系统的四层架构(ADAS 应用层、ADAS-MGR 层、Vehicle-MGR 层、执行器层)通过标准化接口实现耦合减弱。ADAS 应用层仅向 ADAS-MGR 层发送运动控制请求,不直接与执行器交互;ADAS-MGR 层通过标准化接口与 Vehicle-MGR 层通信,处理功能变更影响;Vehicle-MGR 层统一向执行器发送控制命令,执行器状态仅反馈给 Vehicle-MGR 层。这种分层接口设计使上层应用功能变更或底层执行器更换时,无需修改其他层级逻辑,有效降低了耦合度。
-
问题:在 ACC、AEB、LKA 三个 ADAS 应用中,各自向 ADAS-MGR 层发送的核心请求参数是什么?有何单位或状态定义?
答案:- ACC 向 ADAS-MGR 层发送的核心请求参数为ACC 目标加速度(单位:m/s²,初始值 0)和ACC 停车控制请求(0: 未请求,1: 请求,初始值 0)。
-
AEB 的核心请求参数为AEB 目标加速度(单位:m/s²,初始值 0)和AEB 停车控制请求(0: 未请求,1: 请求,初始值 0)。
-
LKA 的核心请求参数为LKA 目标曲率(单位:1/m,初始值 0)。同时,三者均需发送请求有效性信息(0: 无效,1: 有效)和自身状态信息(如 ACC 状态:0:OFF,1:STANDBY,2:ON)。
-
问题:ADAS-MGR 层在接收各应用请求后,如何保障驾驶安全与舒适?其核心仲裁逻辑是什么?
答案:ADAS-MGR 层通过请求仲裁与整合保障驾驶安全与舒适。核心仲裁逻辑包括:优先选择和排序各 ADAS 应用的纵向加速度请求,生成目标纵向加速度并补充完善;根据各应用需求确定转向辅助扭矩的上下限,确保转向操作合理。同时,ADAS-MGR 层会判断驾驶员是否进行 override 操作(驾驶、制动、转向),并结合执行器系统可靠性信息(如 PT、BRK 系统状态),将仲裁后的运动控制请求发送给 Vehicle-MGR 层,避免冲突请求导致的不安全状态,平衡各应用功能实现与驾驶体验。
(注:文档部分内容可能由 AI 生成)