202506 电子学会青少年等级考试机器人二级理论综合真题
=========================================================================
更多内容和历年真题请查看网站:【试卷中心 -----> 电子学会 ----> 机器人技术 ----> 二级】
网站链接
青少年软件编程历年真题模拟题实时更新
=========================================================================
2025年6月 青少年等级考试机器人理论真题二级
第 1 题
如图,这是中国古代发明的指南车模型,指南车的作用是?( )

A:运送军粮
B:指示方向
C:播放音乐
D:载人载物
第 2 题
以下哪个选项不属于机器人的组成部分?( )
A:传感部分
B:控制部分
C:机械部分
D:漂亮的外观
第 3 题
关于恐怖谷理论说法正确的是?( )
A:机器人太过于与人相似会让人产生恐惧心理
B:人类觉得机器人很恐怖
C:机器人觉得人类很恐怖
D:机器人的外形不可以太恐怖
第 4 题
一节5号干电池的电压是?( )
A:1.5V
B:36V
C:1000V
D:220V
第 5 题
如图,在打台球时涂抹台球杆头部是为了?( )

A:增大台球杆头部的摩擦力
B:增大台球杆的重力
C:增大台球杆的弹力
D:增大台球杆的支持力
第 6 题
下列常见物品哪个受到的重力最大?( )
A:一个西瓜
B:一个黄豆
C:一个瓜子
D:一个芝麻
第 7 题
飞机飞行时,机翼上方的空气流速比下方快,根据伯努利定理,机翼上方的压强与下方相比如何?( )
A:更大
B:更小
C:无法确定
D:相等
第 8 题
在差速驱动的机器人中,若要使机器人向右转弯,通常应如何调整左右两侧驱动轮的速度?( )
A:左侧轮加速,右侧轮减速
B:左侧轮减速,右侧轮加速
C:左右两侧轮同时加速
D:左右两侧轮同时减速
第 9 题
电动机工作时,主要是将什么形式的能量转化为另一种什么形式的能量?( )
A:电能转化为机械能
B:机械能转化为电能
C:热能转化为电能
D:电能转化为热能
第 10 题
以下齿轮啮合能实现加速作用的是?( )
A:主动轮48齿,从动轮16齿
B:主动轮16齿,从动轮24齿
C:主动轮24齿,从动轮48齿
D:主动轮8齿,从动轮24齿
第 11 题
曲柄滑块机构中滑块做什么动作?( )
A:做回转运动
B:无规律动作
C:在既定的轨道上滑动
D:往复摇摆
第 12 题
下列凸轮机构哪个使用了圆柱凸轮?( )
A: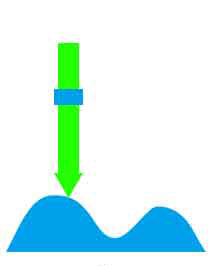
B: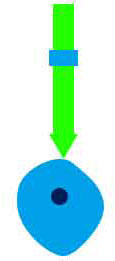
C:
D: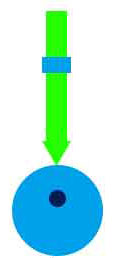
第 13 题
如图,该机构是?( )
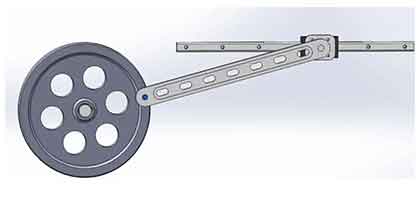
A:曲柄摇杆机构
B:曲柄滑块机构
C:双曲柄机构
D:双摇杆机构
第 14 题
下列哪个是单动式棘轮机构?( )
A:
B:
C:
D:
第 15 题
如果凸轮机构中使用了平底型从动件,凸轮需要满足的条件是?( )
A:必须有内凹处
B:必须是外凸的
C:必须是红色的
D:必须是金属的
第 16 题
下列选项不影响凸轮机构中从动件的运动规律和运动轨迹的是?( )
A:凸轮的材质
B:凸轮的转速
C:凸轮的轮廓曲线
D:从动件的运动方式
第 17 题
双摇杆机构中有几个部件做摇摆动作?( )
A:0个
B:1个
C:2个
D:3个
第 18 题
下列哪个是槽凸轮机构?( )
A:
B:
C:
D:
第 19 题
如图,关于该机构的说法正确的是?( )
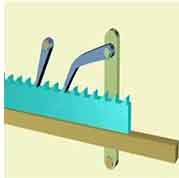
A:这是齿式棘轮机构
B:这是摩擦式棘轮机构
C:这是凸轮机构
D:这是蜗轮蜗杆机构
第 20 题
以下不属于凸轮机构组成的是?( )
A:凸轮
B:从动件
C:机体
D:棘爪
=========================================================================
更多内容和历年真题请查看网站:【试卷中心 -----> 电子学会 ----> 机器人技术 ----> 二级】
网站链接
青少年软件编程历年真题模拟题实时更新
=========================================================================