202506 电子学会青少年等级考试机器人三级器人理论真题
=========================================================================
更多内容和历年真题请查看网站:【试卷中心 -----> 电子学会 ----> 机器人技术 ----> 三级】
网站链接
青少年软件编程历年真题模拟题实时更新
=========================================================================
2025年6月 青少年等级考试机器人理论真题三级
第 1 题
控制装置中,将非电的物理量转化为电信号的器件是?( )
A:执行器
B:控制器
C:传感器
D:发生器
第 2 题
下列选项中,属于执行器的是?( )
A:按键
B:电位器
C:LED
D:红外接收模块
第 3 题
下列电路符号中,用于标识LED的是?( )
A:
B:
C: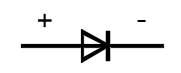
D: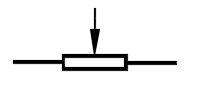
第 4 题
下列选项中,说法正确的是?( )
A:电路搭设完毕,直接通电运行,无需检查电路
B:电路搭设时,无需注意元器件的工作电压
C:电路搭设时,无需注意LED引脚的极性
D:电路搭设时,不可以带电插拔元器件
第 5 题
下图面包板所示的四个标注点中,与中间蓝色点连通的是?( )
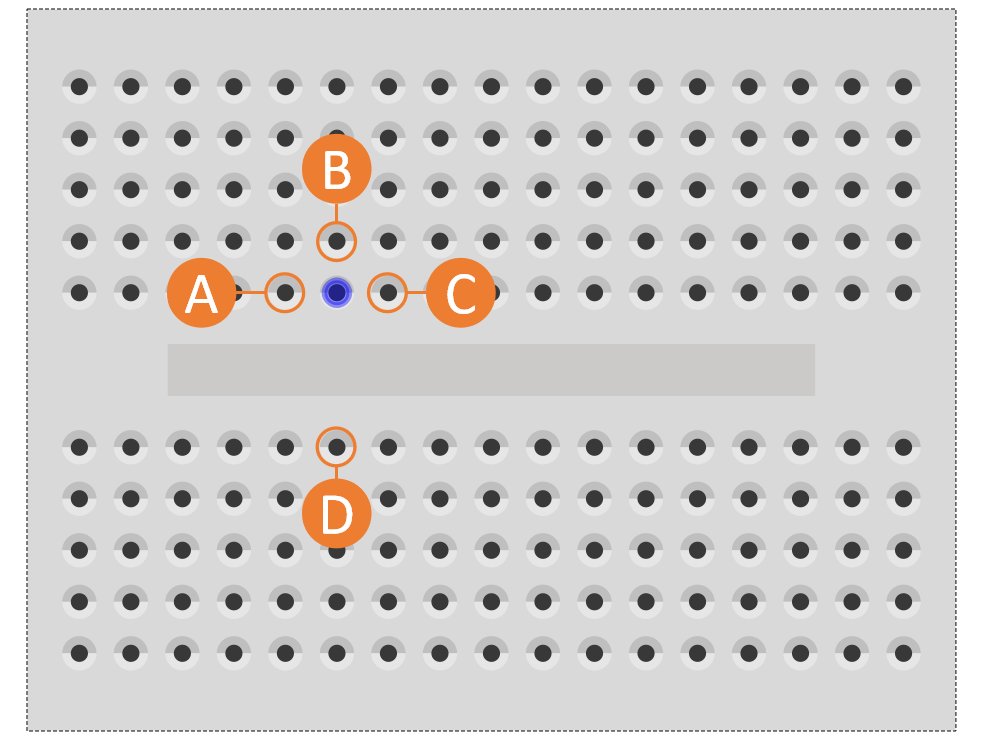
A:A点
B:B点
C:C点
D:D点
第 6 题
下列选项中,用于表示电流单位的是?( )
A:I
B:U
C:R
D:A
第 7 题
下列选项中,一般用做传感器的是?( )
A:LED
B:舵机
C:蜂鸣器
D:按键
第 8 题
Arduino UNO/Nano主控板中,同时具有数字信号和模拟信号输出功能的引脚数量有?( )
A:0个
B:6个
C:14个
D:20个
第 9 题
Arduino UNO/Nano主控板,程序模块如下,程序中变量val值的范围是?( )

A:0/1
B:0/1023
C:0~255
D:0~1023
第 10 题
下列选项中,读取电位器模块的返回值,所对应的模块是?( )
A:
B:
C: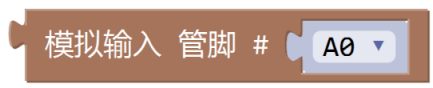
D:
第 11 题
流程图如下,与该流程图对应的程序模块是?( )
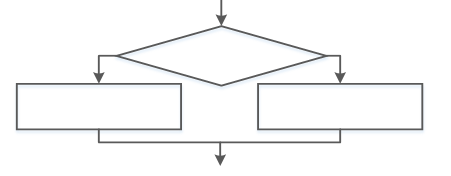
A: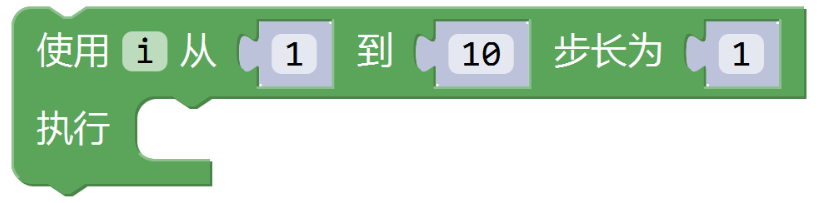
B: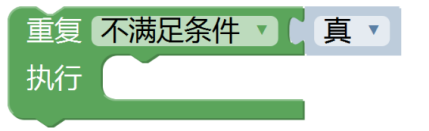
C:
D:
第 12 题
楼道灯一般通过光敏电阻传感器和声音传感器的返回值作为输入,控制灯的点亮和熄灭,下列选项中,通常用于表示两个传感器返回值之间逻辑关系的是?( )
A:
B: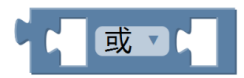
C: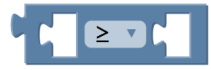
D: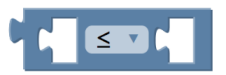
第 13 题
程序模块如下,程序运行后,串口监视器输出的值是?( )

A:3
B:3.00
C:3.5
D:3.50
第 14 题
程序如下,该程序运行后串口监视器显示的结果是?( )
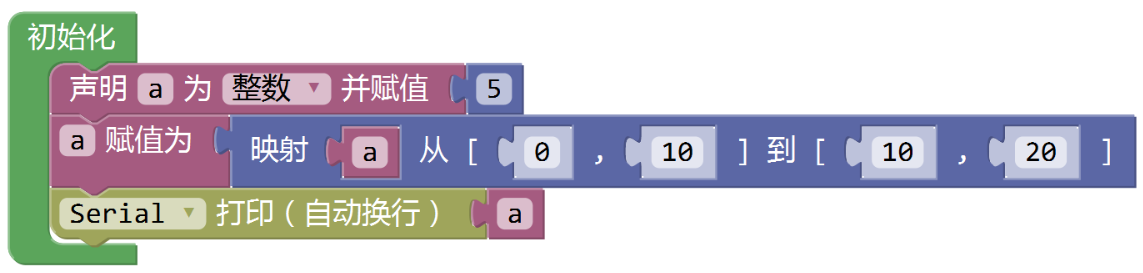
A:0
B:5
C:10
D:15
第 15 题
程序模块如下,程序运行后,串口监视器输出的结果是?( )
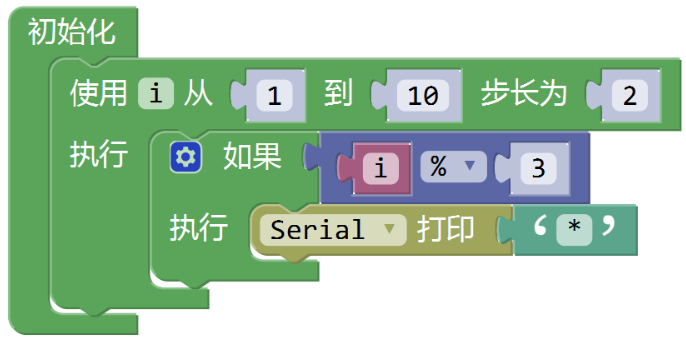
A:*
B:***
C:*******
D:**********
=========================================================================
更多内容和历年真题请查看网站:【试卷中心 -----> 电子学会 ----> 机器人技术 ----> 三级】
网站链接
青少年软件编程历年真题模拟题实时更新
=========================================================================