Python-初学openCV——图像预处理(一)
目录
一、图像翻转
二、颜色加法
三、颜色加权加法
四、灰度化
1、最大值法
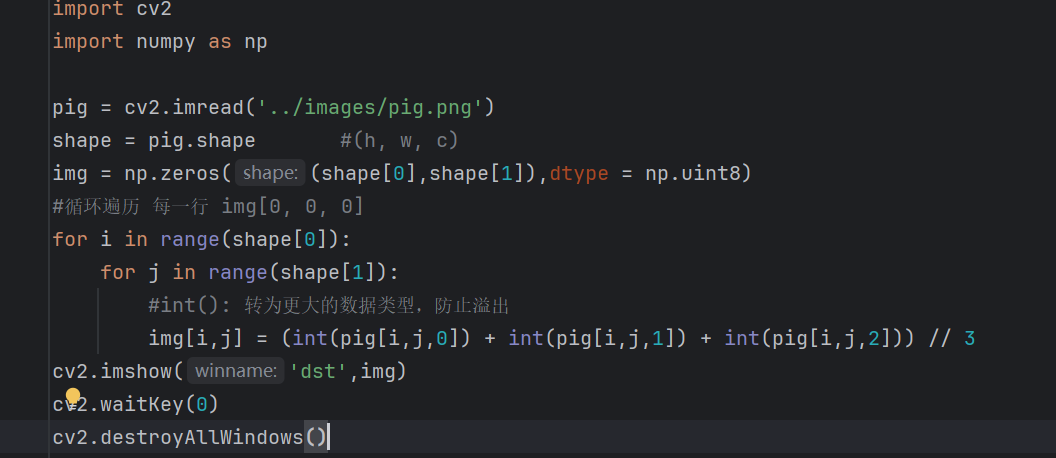
2、平均值法
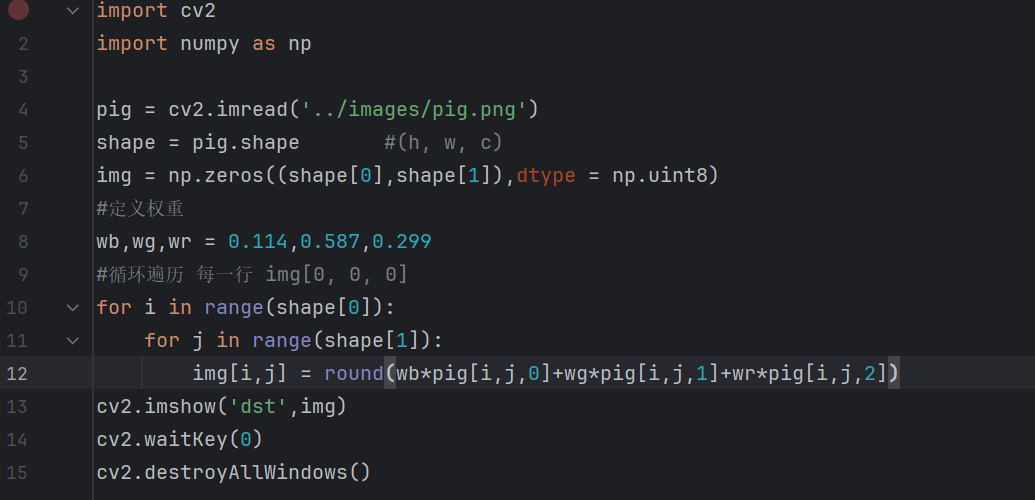
3、加权均值法
五、二值化处理
1、说明
2、全局阈值法
2.1 阈值法(THRESH_BINARY)——(二值化)
2.2 反阈值法(THRESH_BINARY_INV)
2.3 截断阈值法(THRESH_TRUNC)
2.4 低阈值零处理(THRESH_TOZERO)
2.5 超阈值零处理(THRESH_TOZERO_INV)
3、OTSU阈值法
4、自适应二值化
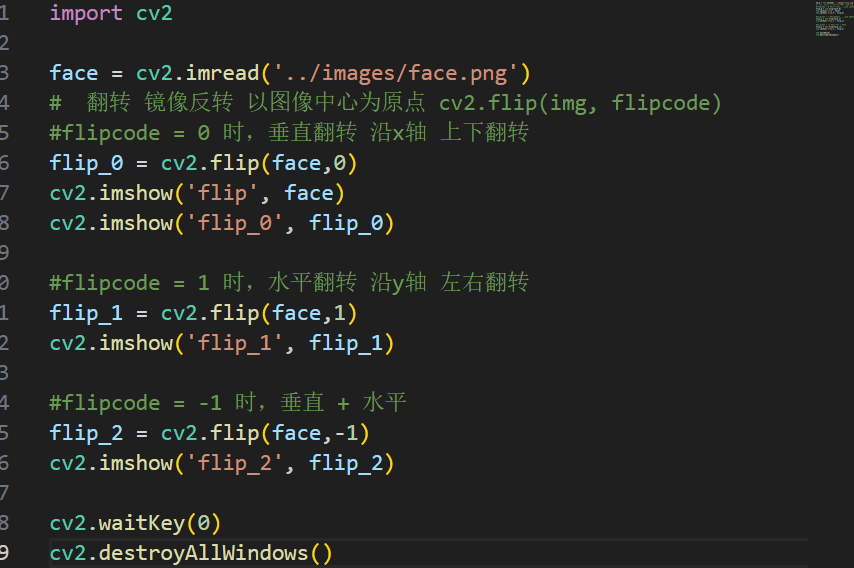
一、图像翻转
在OpenCV中,图片的镜像旋转是以图像的中心为原点进行镜像翻转的
cv2.flip(img,flipcode)
flipcode: 指定翻转类型的标志
flipcode = 0时,垂直翻转,图像像素点沿x轴翻转
flipcode = 1时,水平翻转,图片像素点沿y轴翻转
flipcode = -1时,水平垂直翻转,两者的结合
示例:
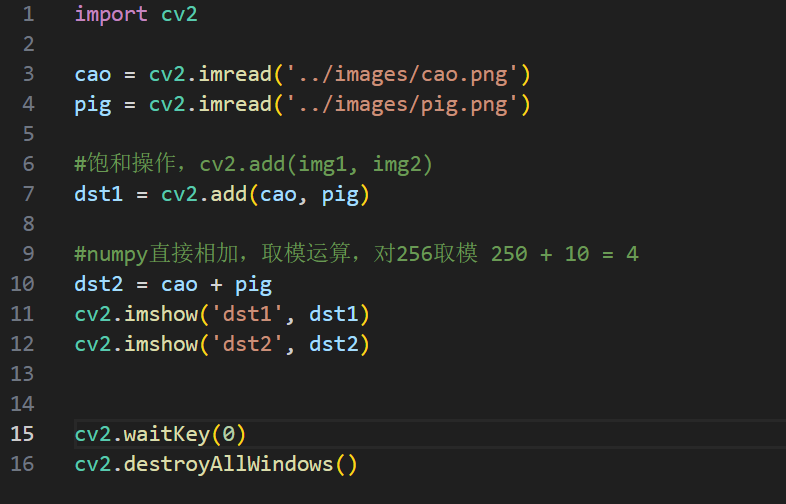
二、颜色加法
可以使用OpenCV的cv.add()函数把两幅图像相加,或者可以简单地通过numpy操作添加两个图像,如res = img1 + img2。两个图像应该具有相同的大小和类型
OpenCV加法和Numpy加法之间存在差异。OpenCV的加法是饱和操作,而Numpy添加是模运算
示例:
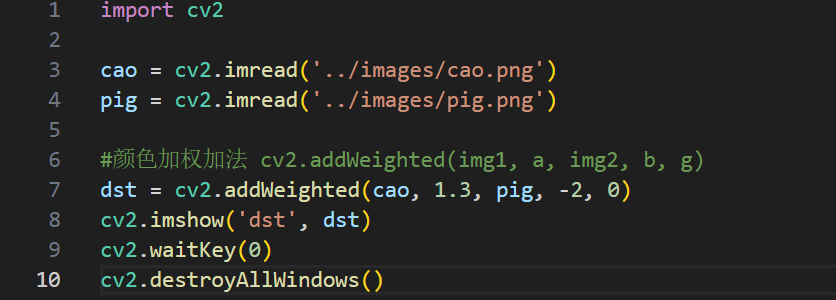
三、颜色加权加法
cv2.addWeighted(src1, alpha, src2, deta, gamma)
src1、src2:输入图像;
alpha、beta:两张图像权重;
gamma:亮度调整值;
gamma > 0:图像变亮
gamma < 0:图像变暗
gamma = 0:没有额外亮度调整
(这其实也是加法,但是不同的是两幅图像的权重不同,这就会给人一种混合或者透明的感觉 )
#图像混合公式
g(x) = (1−α)f0(x) + αf1(x)
#函数cv2.addWeighted()实际操作的公式
dst = α⋅img1 + β⋅img2 + γ示例:
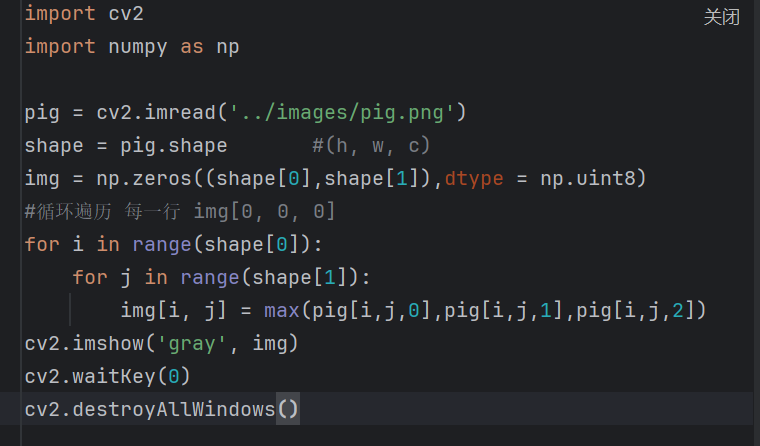
四、灰度化
将彩色图像转换为灰度图像的过程称为灰度化,灰度图与彩色图最大的不同就是:彩色图是由R、G、B三个通道组成,而灰度图只有一个通道,也称为单通道图像,所以彩色图转成灰度图的过程本质上就是将R、G、B三通道合并成一个通道的过程
1、最大值法
对于彩色图像的每个像素,它会从R、G、B三个通道的值中选出最大的一个,并将其作 为灰度图像中对应位置的像素值
2、平均值法
对于彩色图像的每个像素,它会将R、G、B三个通道的像素值全部加起来,然后再除以 三,得到的平均值就是灰度图像中对应位置的像素值
3、加权均值法
对于彩色图像的每个像素,它会按照一定的权重去乘以每个通道的像素值,并将其相 加,得到最后的值就是灰度图像中对应位置的像素值
五、二值化处理
1、说明
一幅二值图像的二维矩阵仅由0、1两个值构成,“0”代表黑色,“1”代白色。由于每一像 素(矩阵中每一元素)取值仅有0、1两种可能,所以计算机中二值图像的数据类型通常 为1个二进制位。二值图像通常用于文字、线条图的扫描识别(OCR)和掩膜图像的存储
其操作的图像也必须是灰度图,二值化的过程,就是将一张灰度图上的像素根据某种规 则修改为0和maxval(maxval表示最大值,一般为255,显示白色)两种像素值,使图 像呈现黑白的效果,能够帮助我们更好地分析图像中的形状、边缘和轮廓等特征
简便:降低计算量和计算需求,加快处理速度
节约资源:二值图像占用空间远小于彩色图
边缘检测:二值化常作为边缘检测的预处理步骤,简化后的图易于识别出轮廓和边界
2、全局阈值法
_,binary = cv2.threshold(img,thresh,maxval,type)img:输入图像,要进行二值化处理的灰度图
thresh:设定的阈值。当像素值大于(或小于,取决于阈值类型)thresh时,该像素被赋予的值
type:阈值处理的类型
返回值:
第一个值(通常使用 '_'):计算出的阈值,若使用自适应阈值法,会根据算法自动出这 个值
第二个值(binary):二值化后的图像矩阵。与输入图像尺寸相同
2.1 阈值法(THRESH_BINARY)——(二值化)
阈值法就是通过设置一个阈值,将灰度图中的每一个像素值与该阈值进行比较,小 于等于阈值的像素就被设置为0(通常代表背景),大于阈值的像素就被设置为maxval (通常代表前景)。对于我们的8位图像(0~255)来说,通常是设置为255

2.2 反阈值法(THRESH_BINARY_INV)
反阈值法是当灰度图的像素值大于阈值时,该像素值将会变成0(黑),当灰度图 的像素值小于等于阈值时,该像素值将会变成maxval(与阈值法相反)

2.3 截断阈值法(THRESH_TRUNC)
指将灰度图中的所有像素与阈值进行比较,像素值大于阈值的部分将会被修改为阈 值,小于等于阈值的部分不变

2.4 低阈值零处理(THRESH_TOZERO)
低阈值零处理,字面意思,就是像素值小于等于阈值的部分被置为0(也就是黑 色),大于阈值的部分不变

2.5 超阈值零处理(THRESH_TOZERO_INV)
超阈值零处理就是将灰度图中的每个像素与阈值进行比较,像素值大于阈值的部分 置为0(也就是黑色),像素值小于等于阈值的部分不变

3、OTSU阈值法
cv2.THRESH_OTSU 并不是一个有效的阈值类型或标。THRESH_OTSU 本身并不是一个独立的阈值化方法,而是与 OpenCV 中的二值化方法结合使用的一个标志。具体来说,THRESH_OTSU 通常与 THRESH_BINARY 或 THRESH_BINARY_INV 结合使用。在实际应用中,如果你使用 THRESH_OTSU 标志但没有指定其他二值化类型,默认情况下它会与 THRESH_BINARY 结合使用。也就是说,当你仅指定了 cv2.THRESH_OTSU,实际上等同于同时指定了 cv2.THRESH_BINARY + cv2.THRESH_OTSU。

4、自适应二值化
与二值化算法相比,自适应二值化更加适合用在明暗分布不均的图片,因为图片的明暗不均,导致图片上的每一小部分都要使用不同的阈值进行二值化处理,这时候传统的二值化算法就无法满足我们的需求了,于是就出现了自适应二值化
自适应二值化方法会对图像中的所有像素点计算其各自的阈值,这样能够更好的保留图片里的一些信息
cv2.adaptiveThreshold(image_np_gray, maxval, adaptiveMethod, thresholdType, blockSize, c)参数为:
image_np_gray:灰度图
maxval:最大阈值,一般为255
adaptiveMethod:小区域阈值的计算方式
ADAPTIVE_THRESH_MEAN_C:小区域内取均值
ADAPTIVE_THRESH_GAUSSIAN_C:小区域内加权求和,权重是个高斯核
thresholdType:二值化方法, 只能使用阈值法和反阈值法
blockSize:选取的小区域的面积,如7就是7*7的小块
c:最终阈值等于小区域计算出的阈值再减去此值
