AGV小车cad+三维图+设计说明书
摘要:近年来,随着现代科技的发展,很多行业都被机器人所替代,AGV物料机器人作为一种具备高自动化和智能化的移动机器人得到了广泛的应用,尤其是在电商物流领域,极大的促进了仓储物料的搬运工作。在这样的研究背景下,本文完成了一种用于搬运物料的AGV移动机器人,其主要是由移动装置、搬运装置和货架升降装置三部分组成。主要完成了移动机器人的机械结构设计和主要控制核心的选型,完成了AGV移动物流机器人的车体移动装置的设计和自动升降货架的设计。移动装置采用麦克纳姆轮极大的提高了AGV小车的灵活性,搬运装置采用多自由度机械臂,并完成了手部末端执行器的设计,货架升级装置采用电机丝杠螺母升降机构。所设计的AGV移动物流机器人能够非常便利地完成对快件的搬运等任务,从而提升现代物流中的分类效率,推动物流业的发展。
关键词:AGV;麦克纳姆轮;丝杠螺母;solidworks
目 录
1 绪论 1
1.1 选题的背景及意义 1
1.2 国内外研究的现状 1
1.2.1 国外研究的现状 1
1.2.2 国内研究的现状 3
1.3 移动物流机器人的发展前景 5
1.4 本文主要采用的研究方法 6
1.5 本次设计主要研究内容 6
2 仓储式移动物流机器人总体设计方案 8
2.1 设计方法和设计原则 8
2.1.1 总体设计方法 8
2.1.2 总体结构设计 8
2.2 总体设计思路 9
2.3 本章小结 9
3 仓储物流机器人车体结构设计 10
3.1 移动装置的设计 10
3.1.1 麦克纳姆轮工作原理 10
3.1.2 麦克纳姆轮工作特点 11
3.1.3 麦克纳姆轮的运动分析 11
3.2 搬运装置的结构设计 13
3.2.1 机械臂的工作原理 13
3.2.2 末端执行器的设计 14
3.3 本章小结 15
4 仓储物流机器人货架升降结构设计 16
4.1 滚珠丝杠副的原理 16
4.2 滚珠丝杠副的特点 16
4.3 电机的选型计算 16
4.4 丝杠螺母的选型计算 19
4.4.1 丝杠的选型计算 19
4.4.2 螺母的选型计算 20
4.5 本章小结 21
5 仓储物流移动机器人控制系统设计 22
5.1 单片机控制系统 22
5.2 电机驱动系统 22
5.3 地图构建和导航系统 23
5.4 机器视觉模块 24
5.5 本章小结 25
6 仓储物流移动机器人的三维建模和有限元分析 26
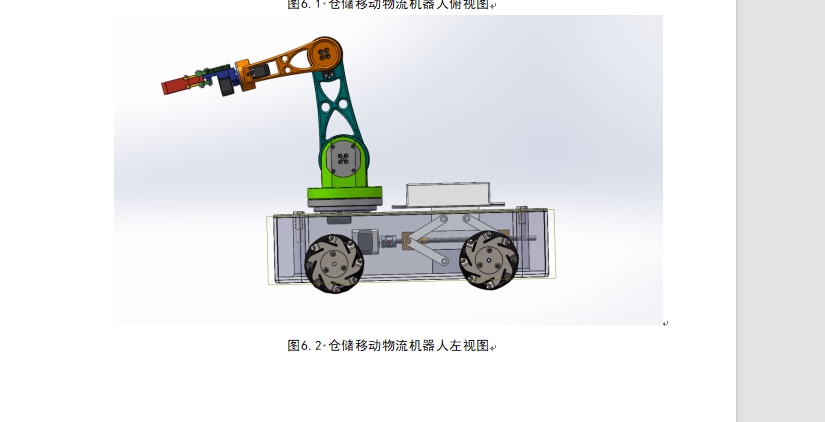
6.1 三维建模 26
6.2 本章小结 29
7 总结与展望 30
7.1 总结 30
7.2 展望 30
文 献 参 考 31
致 谢 33
1 绪论
1.1 选题的背景及意义
近几年来,伴随著科技的进步,许多产业已逐步被机器人所取代,其中以机器人为主的工业更是如此[1]。这一问题尤其突出,现代的物流搬运技术是建立在传统的物流的基础上,利用更加先进的现代控制理论技术,来完成对仓储物流的自动化搬运,并且在行进的时候能够进行路径规划,具有远距离高效率的优点。自动导引小车。AGV是一种用来进行设备搬运的自动化物流机器人,它具有自动导引装置,能够进行自动的路线规划和导航,AGV物流机器人具有较高的自动化水平;具有自动充电,占用空间小等特点[2]-[3]。
综上所述,使用AGV仓储型移动式机器人能有效的减少存储成本,节约人力资源,提升存储的品质与效率[4]。降低货物在搬运时所产生的损失,提高了货物的归类工作的效率,促进了物流业的发展。除此之外,与仓储物流有关的技术还可以应用在其它领域,比如物料处理领域、酒店搬货领域、军事领域以及危险场所领域等。基于此,研究和实现一种基于物流行业的仓储式移动机器人,具有很高的研究和很好的社会效益[5]。
1.2 国内外研究的现状
AGV也叫无人搬运车[6],是一种搭载有轨迹自动导航的物流搬运小车,可以按照设定的路线自动行驶。
1.2.2 国外研究的现状
AGV在欧洲已经存在很长时间了。1913年,美国福特公司第一次将这种自动搬运的概念运用到了生产中,并利用一种由轨道控制的无人搬运车,来实现对车身部件的搬运[8]。早在20世纪五十年代,美国一家名叫Basrrett的电子公司,便开发出了一款名叫AGV的小型汽车,这种汽车的出现,不仅大大提高了企业的产能,而且还带动了企业的整体生产水平,实现了企业的全自动化[9]。在这个时候,英国也发布了一款利用电磁波进行导航的自动驾驶汽车,这款汽车可以利用电磁波来进行导航,从而实现对汽车的导航[10]。这种AGV车迅速普及开来。AGV技术是在上个世纪60、70年代迅速发展起来的,当时它的技术也有了很大的进步。伴随著电脑科技的飞速发展,美国AGV有关的技术在八十年代已日趋完善,不但使其运力增加,而且大大减少了装卸和搬运所耗费的时间费用;并为AGV提供了在线充电的能力[11]。国外设计的DMV小车如下图1.1所示。
图1.1 DMV AGV小车
90年代以来,随着环境信息处理技术的进步,自主导航技术的进步,以及真实环境下的轨迹规划技术的进步,美国首次向火星发送了索杰纳,比利时首次采用了激光引导技术的AGV,以及2004年“勇气号”和“机遇号”的登陆任务[12]。80年代日本AGV的年收入是60亿日圆,85年的时候这个数字已经飙升到了200亿日圆,而在2010年的时候,AGV已经被大量使用,特别是在高自动化的流水线上。至今,AGV技术在国外的发展已经比较成熟[13]。设计的智能化比价高的AGV小车如下图1.2所示。
图1.2 智能化AGV小车
1.2.3 国内研究的现状
在国内AGV技术的发展相对滞后,但自70年代以来,国内对AGV技术的发展一直处于起步阶段[14]。自76年北京起重机所研制出首辆AGV以来,国内AGV技术取得了长足的进步。在1976,北京的起重机械研究院,对中国的第一个AGV进行了设计和研制,并在此基础上,构建出了中国的第一个球形加工示范系统[15]。
近年来,随着我国科技实力的提升,我国设计了很多更高性能的AGV小车,主要是应用在无人快递领域。我国作为一个制造业大国,AGV小车在我国得到了广泛的应用,其主要是集中在汽车、3C制造和电子商务等领域,于此同时,随着5G技术的发展,各种快速的通信手段的产生,使得多机器人高效协同工作成为可能,通过5G技术构建一个虚拟的仿真平台,使得AGV小车得到了快速的发展[16]。另外一个主要的因素的随着我国劳动力的减少,劳动力的价格每年逐步上升,而随着科学技术的提高,社会生产力的变化,AGV小车的成本正在逐步减少,因此使用AGV小车来代替传统的人工进行生产活动,其已经成为许多企业降低成本的主要途径。最近几年,我国在AGV小车领域的研究也取得了一些成就,如下图1.3所示是我国的电商科技公司京东设计研发的无人物流AGV小车,其具有高度的自动路径规划和自动避障功能,其已经在一些地方开始了试用,具有良好的反馈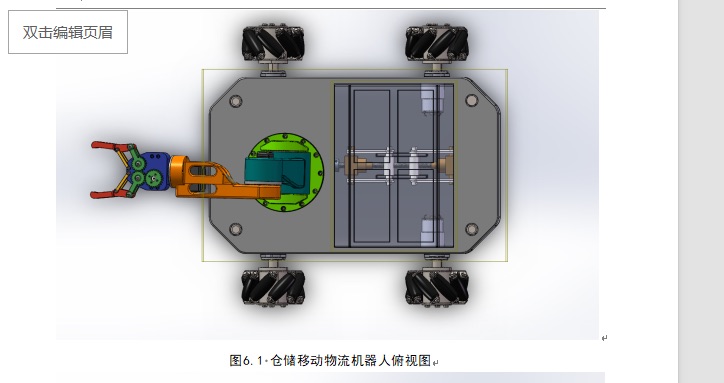
本人从事十多年模具设计师与模具制造 模具设计、高级工程师本人设计CAD 二维工程图 三维工程图 产品设计 逆向建模 51单片机 STM32 单片机 代码 实物 原理 v2v9v9v1v2v9v3v1v9v6v