【新启航】航空飞机起落架深孔型腔的内轮廓检测方法探究 - 激光频率梳 3D 轮廓检测
摘要:航空飞机起落架深孔型腔内轮廓检测对飞行安全至关重要,传统检测方法在复杂结构与高精度要求下面临挑战。本文探究基于激光频率梳的 3D 轮廓检测技术,分析其检测原理、核心优势及在起落架深孔型腔检测中的工程应用,为内轮廓高精度检测提供创新解决方案。
关键词:航空起落架;深孔型腔;内轮廓检测;激光频率梳;3D 轮廓检测
一、引言
航空飞机起落架作为起降过程中的关键承力部件,其深孔型腔内轮廓精度直接影响起落架的承载性能与疲劳寿命。深孔型腔在起落架缓冲器缸筒、轮轴连接孔等结构中普遍存在,具有深径比大(可达 12:1)、内轮廓复杂(含阶梯面、锥度区、环槽等)的特点。传统接触式检测如三坐标测量,受测头刚性限制难以深入复杂型腔;工业内窥镜仅能获取二维图像,无法完整表征三维轮廓。因此,亟需适配深孔型腔内轮廓特征的高精度检测技术。
二、激光频率梳 3D 轮廓检测原理
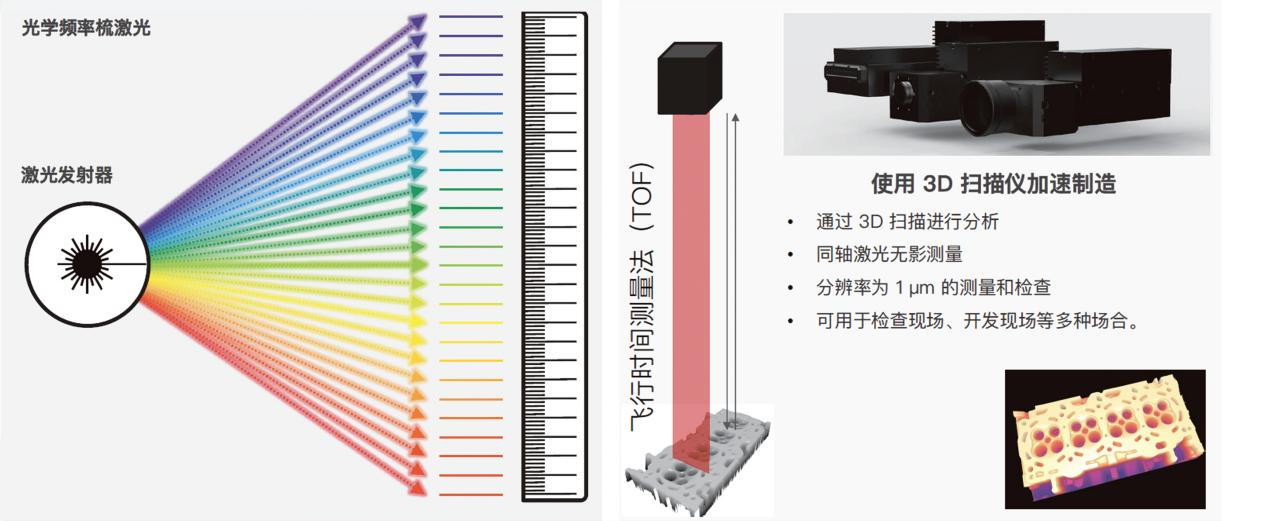
激光频率梳通过飞秒激光器产生频率间隔稳定的脉冲序列,形成梳状频谱结构。在深孔型腔内轮廓检测中,采用光纤耦合探针(直径 1.5mm)将激光导入型腔,基于光飞行时间(ToF)原理测量距离:脉冲光照射型腔内壁反射后,与参考光产生干涉,通过测量相位差计算光程差,结合频率梳重复频率f_r,可得距离d = c·\Delta t/2(c为光速,\Delta t为时间延迟)。检测系统通过振镜扫描模块(扫描角度 ±45°)与精密运动平台配合,实现轴向 0.05mm、周向 0.2° 的高密度采样,重构深孔型腔三维轮廓模型。
三、技术优势分析
(一)复杂轮廓高分辨率表征
针对起落架深孔型腔内 0.8mm 的过渡圆角、0.5mm 的环槽等细微结构,激光频率梳可实现 0.03mm 采样间隔的点云采集。某型起落架缓冲器缸筒检测实验表明,该技术对深度 3mm、宽度 2mm 的环槽轮廓识别率达 97%,较传统超声检测提升 40%。
(二)深径比适应性与无损检测
凭借光纤传导光束,可深入直径 4mm、深度 50mm 的深孔型腔,且测量误差不随孔深显著增加。在壁厚 2mm 的型腔检测中,激光频率梳的非接触测量避免了传统触针(针尖力 > 0.8mN)导致的孔壁形变,光压力 < 0.2μN,经三坐标复测验证,测量引起的形变误差 < 0.008mm。
(三)动态检测效率提升
采用线性调频连续波(FMCW)技术的激光频率梳系统,采样速率达 20kHz,完成直径 20mm、深度 150mm 的型腔全轮廓检测仅需 10 秒,较工业 CT 的 3 分钟检测时间提升 18 倍,满足生产线在线检测需求。
四、工程应用实践
(一)缓冲器缸筒内轮廓检测
在空客 A320 起落架缓冲器缸筒检测中,激光频率梳 3D 轮廓检测发现缸筒内壁 40mm 深处存在 0.15mm 的局部凹陷,通过三维轮廓分析确定凹陷区域范围。传统涡流检测因无法获取三维形貌未能识别该缺陷,验证了该技术在细微缺陷检测中的优势。
(二)轮轴连接孔型腔校准
起落架轮轴连接孔型腔位置度公差要求≤0.12mm,传统检测需拆卸零件离线测量。激光频率梳便携探头(长度 200mm)伸入轮轴安装状态的深孔内,15 分钟完成型腔三维坐标测量,检测数据与 CAD 模型比对偏差控制在 0.09mm 以内,实现装机状态下的在线校准。
(三)内表面粗糙度量化评估
建立基于三维轮廓的粗糙度评价模型,对起落架缸筒内表面进行 Ra 值测量。实验数据显示,该技术测量结果与触针式粗糙度仪的偏差在 ±7% 以内,满足航空标准中 Ra≤1.6μm 的检测要求,且避免了触针磨损导致的测量误差。
五、技术挑战与发展方向
当前激光频率梳在深孔型腔内轮廓检测中面临强反射表面(如镀铬内壁)信号饱和、深孔中段杂散光干扰等问题。未来可通过多波长激光复合探测、智能滤波算法优化等手段提升抗干扰能力,同时开发适配复杂型腔结构的模块化柔性探头,推动该技术在航空维修领域的工程化应用。
激光频率梳3D光学轮廓测量系统简介:
20世纪80年代,飞秒锁模激光器取得重要进展。2000年左右,美国J.Hall教授团队凭借自参考f-2f技术,成功实现载波包络相位稳定的钛宝石锁模激光器,标志着飞秒光学频率梳正式诞生。2005年,Theodor.W.Hänsch(德国马克斯普朗克量子光学研究所)与John.L.Hall(美国国家标准和技术研究所)因在该领域的卓越贡献,共同荣获诺贝尔物理学奖。
系统基于激光频率梳原理,采用500kHz高频激光脉冲飞行测距技术,打破传统光学遮挡限制,专为深孔、凹槽等复杂大型结构件测量而生。在1m超长工作距离下,仍能保持微米级精度,革新自动化检测技术。
核心技术优势
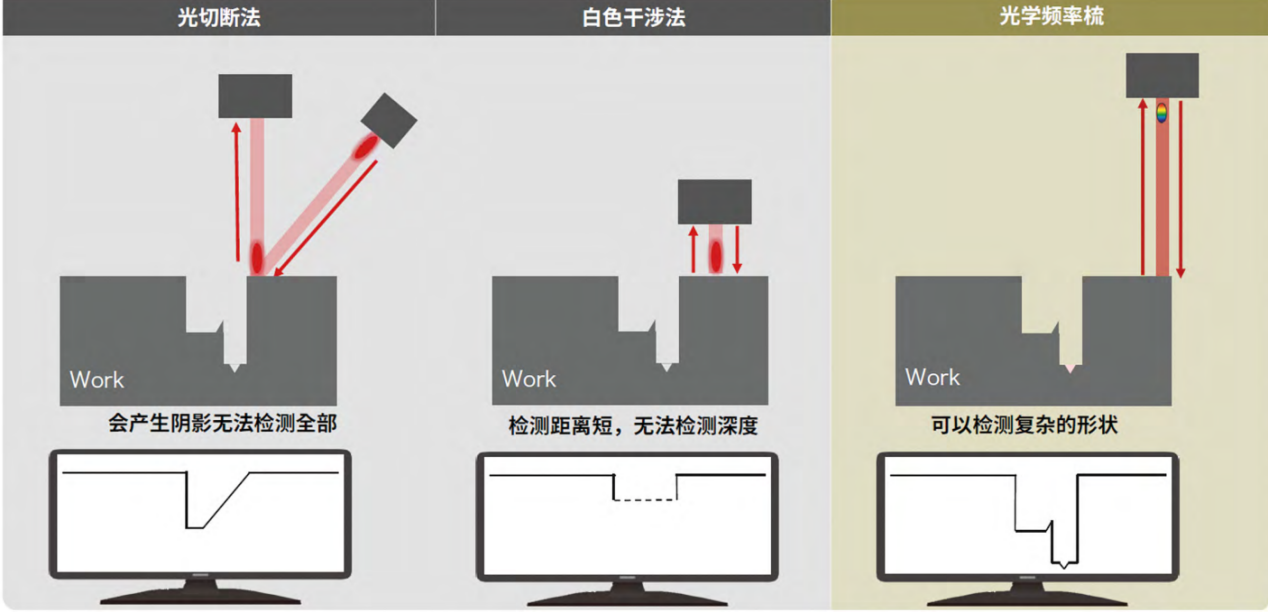
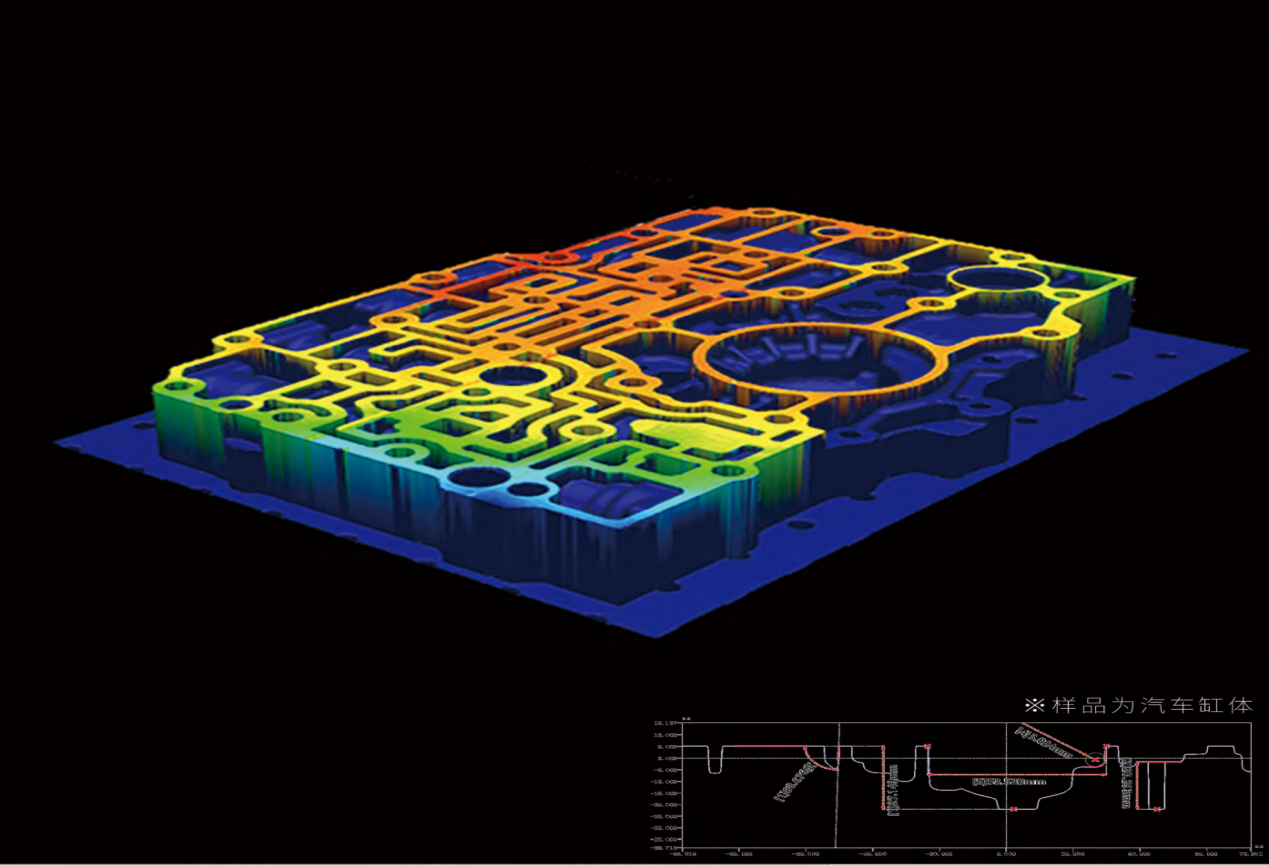
①同轴落射测距:独特扫描方式攻克光学“遮挡”难题,适用于纵横沟壑的阀体油路板等复杂结构;
(以上为新启航实测样品数据结果)
②高精度大纵深:以±2μm精度实现最大130mm高度/深度扫描成像;
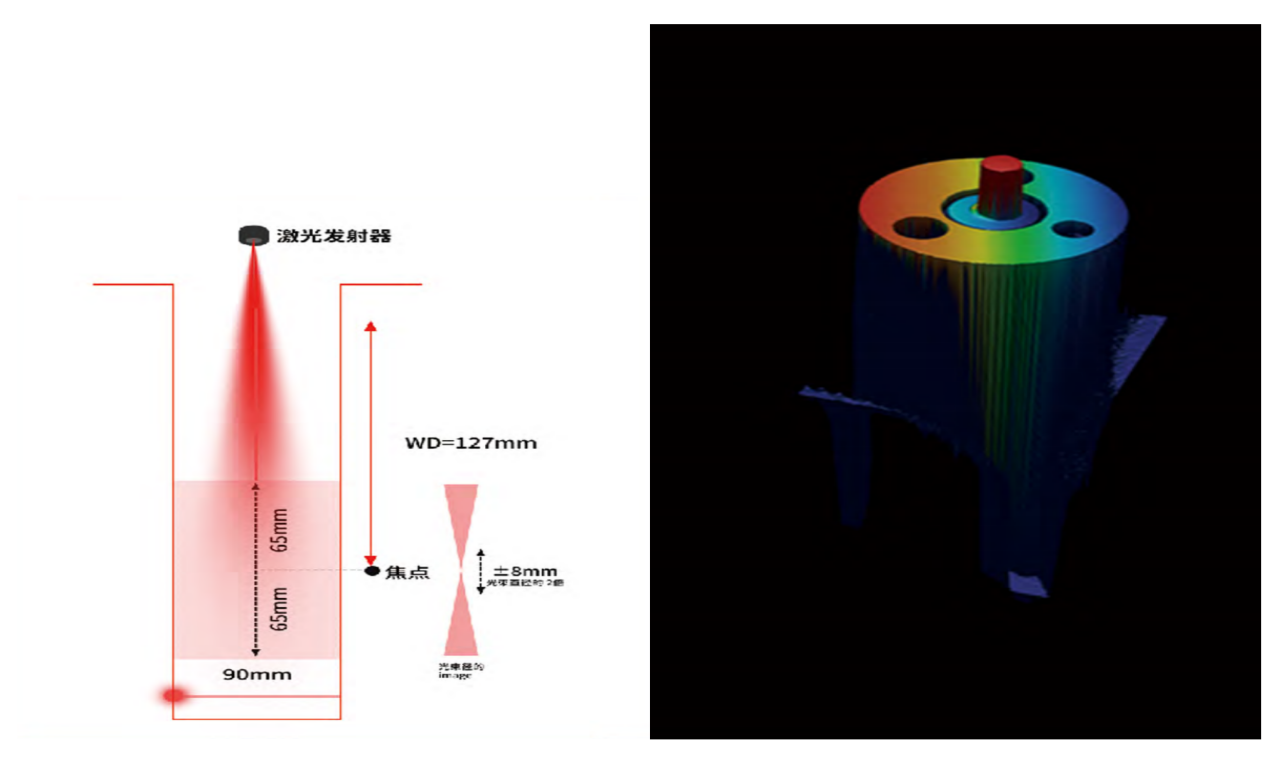
(以上为新启航实测样品数据结果)
③多镜头大视野:支持组合配置,轻松覆盖数十米范围的检测需求。
(以上为新启航实测样品数据结果)