【CUDA 编程思想】FusedQKVProj-分组量化矩阵乘法高效实现全流程解析
概述
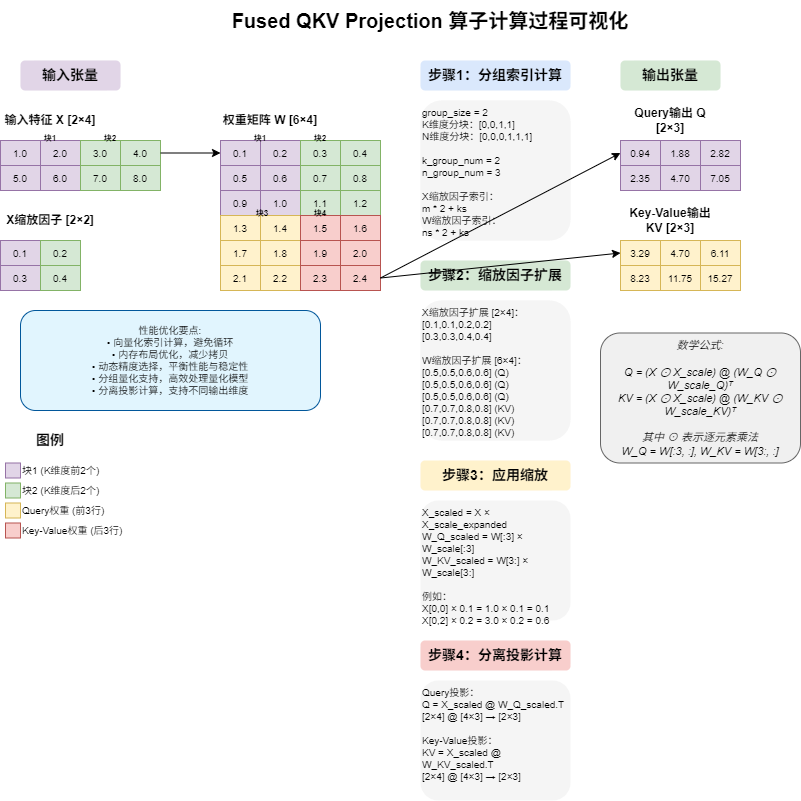
Fused QKV Projection 是一个在大语言模型推理中广泛使用的高效算子,它将输入特征通过共享权重矩阵同时投影到 Query、Key、Value 三个空间。本文深入分析其 native 实现,揭示其核心算法和优化策略。
算子定义
def fused_qkv_proj(q: Tensor, kv: Tensor, x: Tensor, weight: Tensor, x_scale: Tensor, weight_scale: Tensor, group_size: int) -> None
输入参数:
q: Query 输出张量,形状为[M, N_0]kv: Key-Value 输出张量,形状为[M, N_1]x: 输入特征张量,形状为[M, K]weight: 权重矩阵,形状为[N, K],其中N = N_0 + N_1x_scale: 输入缩放因子,用于量化反量化weight_scale: 权重缩放因子,用于量化反量化group_size: 分组量化的大小
输出:
- 直接修改
q和kv张量,无返回值
核心算法流程
- native 实现
class FusedQKVProjImpl:def native_impl(self, q: torch.Tensor, kv: torch.Tensor, x: torch.Tensor, weight: torch.Tensor, x_scale: torch.Tensor, weight_scale: torch.Tensor, group_size: int) -> None:"""CPU实现,使用torch.matmul进行矩阵乘法和缩放,与native实现完全一致"""# return torch.ops._VLLM_C.fused_qkv_proj(q, kv, x, weight, x_scale, weight_scale, group_size)# 获取输入张量的维度信息# x: [M, K], weight: [N, K], q: [M, N_0], kv: [M, N_1]x_sizes = x.shapeM = 1for i in range(len(x_sizes) - 1):M *= x_sizes[i]K = x_sizes[-1]# 获取输出张量的维度N_0 = q.shape[-1] # q的最后一维N_1 = kv.shape[-1] # kv的最后一维N = N_0 + N_1 # 总的输出特征维度# 验证weight的维度if weight.shape != (N, K):raise ValueError(f"Expected weight shape ({N}, {K}), but got {weight.shape}")# 将输入张量转换为2D视图用于矩阵乘法x_2d = x.view(M, K)# 根据设备类型选择计算精度if x.device.type == 'cpu':# CPU设备使用fp16计算compute_dtype = torch.float64else:# 其他设备使用fp32计算compute_dtype = torch.float32# 转换为选择的计算精度x_compute = x_2d.to(compute_dtype)weight_compute = weight.to(compute_dtype)x_scale_compute = x_scale.to(compute_dtype)weight_scale_compute = weight_scale.to(compute_dtype)# 计算group数量,与native实现一致k_group_num = (K + group_size - 1) // group_sizen_group_num = (N + group_size - 1) // group_size# 向量化创建与native实现完全一致的scale张量# 创建索引张量k_indices = torch.arange(K, dtype=torch.long)n_indices = torch.arange(N, dtype=torch.long)m_indices = torch.arange(M, dtype=torch.long)# 计算group索引ks_indices = k_indices // group_size # [K]ns_indices = n_indices // group_size # [N]# 计算x_scale索引: m * k_group_num + ks_idx# 使用广播: [M, 1] + [K] -> [M, K]x_scale_indices = m_indices.unsqueeze(1) * k_group_num + ks_indices.unsqueeze(0) # [M, K]# 计算weight_scale索引: ns_idx * k_group_num + ks_idx# 使用广播: [N, 1] + [K] -> [N, K]weight_scale_indices = ns_indices.unsqueeze(1) * k_group_num + ks_indices.unsqueeze(0) # [N, K]# 展平scale张量并索引x_scale_flat = x_scale_compute.view(-1)weight_scale_flat = weight_scale_compute.view(-1)# 使用高级索引获取scale值x_scale_expanded = x_scale_flat[x_scale_indices] # [M, K]weight_scale_expanded = weight_scale_flat[weight_scale_indices] # [N, K]# 应用scale: x * x_scale_expandedx_scaled = x_compute * x_scale_expanded # [M, K] * [M, K] -> [M, K]# 计算 q = x_scaled @ weight[:N_0, :].T,应用weight_scaleweight_q = weight_compute[:N_0, :] # [N_0, K]weight_scale_q = weight_scale_expanded[:N_0, :] # [N_0, K]# 应用weight_scale到weight: weight_q * weight_scale_qweight_q_scaled = weight_q * weight_scale_q # [N_0, K] * [N_0, K] -> [N_0, K]q_out = torch.matmul(x_scaled, weight_q_scaled.T) # [M, K] @ [K, N_0] -> [M, N_0]# 计算 kv = x_scaled @ weight[N_0:, :].T,应用weight_scaleweight_kv = weight_compute[N_0:, :] # [N_1, K]weight_scale_kv = weight_scale_expanded[N_0:, :] # [N_1, K]# 应用weight_scale到weight: weight_kv * weight_scale_kvweight_kv_scaled = weight_kv * weight_scale_kv # [N_1, K] * [N_1, K] -> [N_1, K]kv_out = torch.matmul(x_scaled, weight_kv_scaled.T) # [M, K] @ [K, N_1] -> [M, N_1]# 将结果转换为原始数据类型并复制到输出张量q.copy_(q_out.to(q.dtype).view(q.shape))kv.copy_(kv_out.to(kv.dtype).view(kv.shape))return
1. 张量维度解析与验证
# 解析输入张量维度
M = prod(x.shape[:-1]) # 批次大小
K = x.shape[-1] # 输入特征维度
N_0 = q.shape[-1] # Query 输出维度
N_1 = kv.shape[-1] # Key-Value 输出维度
N = N_0 + N_1 # 总输出维度# 验证权重矩阵维度
assert weight.shape == (N, K)
2. 动态精度选择
根据设备类型自动选择计算精度,确保数值稳定性:
if x.device.type == 'cpu':compute_dtype = torch.float64 # CPU 使用双精度
else:compute_dtype = torch.float32 # GPU 使用单精度
3. 分组量化索引计算
这是算法的核心部分,通过向量化操作高效计算每个元素的缩放因子索引:
# 计算分组数量
k_group_num = (K + group_size - 1) // group_size
n_group_num = (N + group_size - 1) // group_size# 创建索引张量
k_indices = torch.arange(K, dtype=torch.long)
n_indices = torch.arange(N, dtype=torch.long)
m_indices = torch.arange(M, dtype=torch.long)# 计算分组索引
ks_indices = k_indices // group_size # [K]
ns_indices = n_indices // group_size # [N]# 计算 x_scale 索引: m * k_group_num + ks_idx
x_scale_indices = m_indices.unsqueeze(1) * k_group_num + ks_indices.unsqueeze(0) # [M, K]# 计算 weight_scale 索引: ns_idx * k_group_num + ks_idx
weight_scale_indices = ns_indices.unsqueeze(1) * k_group_num + ks_indices.unsqueeze(0) # [N, K]
4. 缩放因子应用
通过高级索引高效获取和应用缩放因子:
# 展平并索引缩放因子
x_scale_expanded = x_scale_flat[x_scale_indices] # [M, K]
weight_scale_expanded = weight_scale_flat[weight_scale_indices] # [N, K]# 应用输入缩放
x_scaled = x_compute * x_scale_expanded # [M, K]
5. 分离投影计算
将权重矩阵分割为两部分,分别计算 Query 和 Key-Value 投影:
# Query 投影: q = x_scaled @ weight[:N_0, :].T
weight_q = weight_compute[:N_0, :] # [N_0, K]
weight_scale_q = weight_scale_expanded[:N_0, :] # [N_0, K]
weight_q_scaled = weight_q * weight_scale_q # [N_0, K]
q_out = torch.matmul(x_scaled, weight_q_scaled.T) # [M, N_0]# Key-Value 投影: kv = x_scaled @ weight[N_0:, :].T
weight_kv = weight_compute[N_0:, :] # [N_1, K]
weight_scale_kv = weight_scale_expanded[N_0:, :] # [N_1, K]
weight_kv_scaled = weight_kv * weight_scale_kv # [N_1, K]
kv_out = torch.matmul(x_scaled, weight_q_scaled.T) # [M, N_1]
性能优化策略
1. 向量化索引计算
使用 PyTorch 的广播机制和高级索引,避免循环操作:
# 高效的广播索引计算
x_scale_indices = m_indices.unsqueeze(1) * k_group_num + ks_indices.unsqueeze(0)
2. 内存布局优化
- 使用
view()操作避免内存拷贝 - 通过
copy_()直接修改输出张量,减少内存分配 - 保持张量连续性,优化矩阵乘法性能
3. 计算精度自适应
根据设备类型自动选择最优计算精度,平衡性能和数值稳定性。
数学公式
基础投影公式
对于输入特征 x∈RM×Kx \in \mathbb{R}^{M \times K}x∈RM×K 和权重矩阵 W∈RN×KW \in \mathbb{R}^{N \times K}W∈RN×K:
Query:Q=x⋅WQTwhereWQ=W[:N0,:]\text{Query}: Q = x \cdot W_Q^T \quad \text{where} \quad W_Q = W[:N_0, :]Query:Q=x⋅WQTwhereWQ=W[:N0,:]
Key-Value:KV=x⋅WKVTwhereWKV=W[N0:,:]\text{Key-Value}: KV = x \cdot W_{KV}^T \quad \text{where} \quad W_{KV} = W[N_0:, :]Key-Value:KV=x⋅WKVTwhereWKV=W[N0:,:]
分组量化缩放
对于每个元素 (m,k)(m, k)(m,k) 和 (n,k)(n, k)(n,k):
x_scale[m,k]=x_scale_flat[m⋅k_group_num+⌊k/group_size⌋]\text{x\_scale}[m, k] = \text{x\_scale\_flat}[m \cdot \text{k\_group\_num} + \lfloor k / \text{group\_size} \rfloor]x_scale[m,k]=x_scale_flat[m⋅k_group_num+⌊k/group_size⌋]
weight_scale[n,k]=weight_scale_flat[⌊n/group_size⌋⋅k_group_num+⌊k/group_size⌋]\text{weight\_scale}[n, k] = \text{weight\_scale\_flat}[\lfloor n / \text{group\_size} \rfloor \cdot \text{k\_group\_num} + \lfloor k / \text{group\_size} \rfloor]weight_scale[n,k]=weight_scale_flat[⌊n/group_size⌋⋅k_group_num+⌊k/group_size⌋]
最终计算
q_out=(x⊙x_scale)⋅(WQ⊙weight_scaleQ)T\text{q\_out} = (x \odot \text{x\_scale}) \cdot (W_Q \odot \text{weight\_scale}_Q)^Tq_out=(x⊙x_scale)⋅(WQ⊙weight_scaleQ)T
kv_out=(x⊙x_scale)⋅(WKV⊙weight_scaleKV)T\text{kv\_out} = (x \odot \text{x\_scale}) \cdot (W_{KV} \odot \text{weight\_scale}_{KV})^Tkv_out=(x⊙x_scale)⋅(WKV⊙weight_scaleKV)T
其中 ⊙\odot⊙ 表示逐元素乘法。
应用场景
- Transformer 模型推理: 在注意力机制中同时计算 Q、K、V 投影
- 大语言模型: 支持长序列推理,减少内存访问
- 量化推理: 通过分组量化减少模型大小,保持精度
- 多设备支持: 兼容 CPU、GPU、GCU 等多种计算设备
总结
Fused QKV Projection 算子的 native 实现通过以下关键技术实现了高效计算:
- 向量化索引计算: 避免循环,充分利用硬件并行能力
- 内存优化: 最小化内存拷贝和分配
- 精度自适应: 根据设备特性选择最优计算精度
- 分组量化支持: 高效处理量化模型的缩放因子
triton 实现
from vllm.triton_utils import tl, triton
from vllm.platforms import current_platform
from vllm.logger import init_logger
import torch
import os
import functools
from typing import Any, Callable, Optional, Unionlogger = init_logger(__name__)@functools.lru_cache
def get_w8a8_block_fp8_configs(N: int, K: int, block_n: int,block_k: int) -> Optional[dict[int, Any]]:"""Return optimized configurations for the w8a8 block fp8 kernel.The return value will be a dictionary that maps an irregular grid ofbatch sizes to configurations of the w8a8 block fp8 kernel. To evaluate thekernel on a given batch size bs, the closest batch size in the grid shouldbe picked and the associated configuration chosen to invoke the kernel."""# First look up if an optimized configuration is available in the configs# directorydevice_name = current_platform.get_device_name().replace(" ", "_")json_file_name = f"N={N},K={K},device_name={device_name},dtype=fp8_w8a8,block_shape=[{block_n},{block_k}].json" # noqa: E501config_file_path = os.path.join(os.path.dirname(os.path.realpath(__file__)), "configs", json_file_name)if os.path.exists(config_file_path):with open(config_file_path) as f:logger.info("Using configuration from %s for W8A8 Block FP8 kernel.",config_file_path,)# If a configuration has been found, return itreturn {int(key): val for key, val in json.load(f).items()}# If no optimized configuration is available, we will use the default# configurationlogger.warning("Using default W8A8 Block FP8 kernel config. Performance might ""be sub-optimal! Config file not found at %s",config_file_path,)return Nonedef w8a8_block_fp8_matmul(A: torch.Tensor,B: torch.Tensor,As: torch.Tensor,Bs: torch.Tensor,dot_dtype = None,block_size: list[int] = [128, 128],output_dtype: torch.dtype = torch.bfloat16,
) -> torch.Tensor:"""This function performs matrix multiplication with block-wisequantization.It takes two input tensors `A` and `B` with scales `As` and `Bs`.The output is returned in the specified `output_dtype`.Args:A: The input tensor, e.g., activation.B: The input tensor, e.g., weight.As: The per-token-group quantization scale for `A`.Bs: The per-block quantization scale for `B`.block_size: The block size for per-block quantization. It shouldbe 2-dim, e.g., [128, 128].output_dytpe: The dtype of the returned tensor.Returns:torch.Tensor: The result of matmul."""if isinstance(dot_dtype, int) and dot_dtype == 1:dot_dtype = tl.bfloat16assert len(block_size) == 2block_n, block_k = block_size[0], block_size[1]assert A.shape[-1] == B.shape[-1]assert A.shape[:-1] == As.shape[:-1] and A.is_contiguous()assert triton.cdiv(A.shape[-1], block_k) == As.shape[-1]M = A.numel() // A.shape[-1]assert B.ndim == 2 and Bs.ndim == 2N, K = B.shapeassert triton.cdiv(N, block_n) == Bs.shape[0]assert triton.cdiv(K, block_k) == Bs.shape[1]C_shape = A.shape[:-1] + (N, )C = A.new_empty(C_shape, dtype=output_dtype)configs = get_w8a8_block_fp8_configs(N, K, block_size[0], block_size[1])if configs:# Get the optimal config if there is oneconfig = configs[min(configs.keys(), key=lambda x: abs(x - M))]else:# Default config# Block-wise quant: BLOCK_SIZE_N must be divisible by block_size[0]# BLOCK_SIZE_K must be divisible by block_size[1]config = {"BLOCK_SIZE_M": 64,"BLOCK_SIZE_N": block_size[0],"BLOCK_SIZE_K": block_size[1],"GROUP_SIZE_M": 32,"num_warps": 4,"num_stages": 2,}def grid(META):return (triton.cdiv(M, META["BLOCK_SIZE_M"]) *triton.cdiv(N, META["BLOCK_SIZE_N"]), )_w8a8_block_fp8_matmul[grid](A,B,C,As,Bs,M,N,K,block_n,block_k,# dot_dtype,A.stride(-2),A.stride(-1),B.stride(1),B.stride(0),C.stride(-2),C.stride(-1),As.stride(-2),As.stride(-1),Bs.stride(1),Bs.stride(0),**config,)return Cdef get_default_config(M: int,E: int,N: int,K: int,topk: int,dtype: Optional[str],is_marlin: bool,block_shape: Optional[list[int]] = None,
) -> dict[str, int]:if dtype == "fp8_w8a8" and block_shape is not None:# Block-wise quant: BLOCK_SIZE_N must be divisible by block_shape[0]# BLOCK_SIZE_K must be divisible by block_shape[1]# num_stages=3 can cause triton.runtime.errors.OutOfResources# on ROCm, set it to 2 instead.config = {"BLOCK_SIZE_M": 64,"BLOCK_SIZE_N": block_shape[0],"BLOCK_SIZE_K": block_shape[1],"GROUP_SIZE_M": 32,"num_warps": 4,# "num_stages": 3 if not current_platform.is_rocm() else 2,"num_stages": 2}elif dtype in ["int4_w4a16", "int8_w8a16"] and block_shape is not None:# moe wna16 kernels# only set BLOCK_SIZE_M# BLOCK_SIZE_N and BLOCK_SIZE_K would be set laterbit = 4 if dtype == "int4_w4a16" else 8use_moe_wna16_cuda = should_moe_wna16_use_cuda(M * topk,block_shape[1], E, bit)if use_moe_wna16_cuda:config = {"BLOCK_SIZE_M": min(16, M)}elif M <= 20:config = {"BLOCK_SIZE_M": 16, "GROUP_SIZE_M": 1}elif M <= 40:config = {"BLOCK_SIZE_M": 32, "GROUP_SIZE_M": 1}else:config = {"BLOCK_SIZE_M": 64, "GROUP_SIZE_M": 1}elif is_marlin:for block_size_m in [8, 16, 32, 48, 64]:if M * topk / E / block_size_m < 0.9:breakreturn {"BLOCK_SIZE_M": block_size_m}elif M <= E:config = {"BLOCK_SIZE_M": 16,"BLOCK_SIZE_N": 32,"BLOCK_SIZE_K": 64,"GROUP_SIZE_M": 1,}else:config = {"BLOCK_SIZE_M": 64,"BLOCK_SIZE_N": 64,"BLOCK_SIZE_K": 32,"GROUP_SIZE_M": 8,}return configdef try_get_optimal_moe_config(w1_shape: tuple[int, ...],w2_shape: tuple[int, ...],top_k: int,dtype: Optional[str],M: int,is_marlin: bool = False,block_shape: Optional[list[int]] = None,
) -> dict[str, int]:from vllm.model_executor.layers.fused_moe import get_configoverride_config = get_config()if override_config:config = override_configelse:# First try to load optimal config from the fileE, _, N = w2_shapeif dtype == "int4_w4a16":N = N * 2block_n = block_shape[0] if block_shape else 0block_k = block_shape[1] if block_shape else 0# Else use the default configconfig = get_default_config(M, E, N, w1_shape[2], top_k, dtype,is_marlin, block_shape)return config@triton.jit
def _w8a8_block_fp8_matmul(# Pointers to inputs and outputA,B,C,As,Bs,# Shape for matmulM,N,K,# Block size for block-wise quantizationgroup_n,group_k,# dot_dtype,# Stride for inputs and outputstride_am,stride_ak,stride_bk,stride_bn,stride_cm,stride_cn,stride_As_m,stride_As_k,stride_Bs_k,stride_Bs_n,# Meta-parametersBLOCK_SIZE_M: tl.constexpr,BLOCK_SIZE_N: tl.constexpr,BLOCK_SIZE_K: tl.constexpr,GROUP_SIZE_M: tl.constexpr,
):"""Triton-accelerated function used to perform linear operations (dotproduct) on input tensors `A` and `B` with block-wise quantization, andstore the result in output tensor `C`."""# dot_dtype = tl.bfloat16dot_dtype = Nonepid = tl.program_id(axis=0)num_pid_m = tl.cdiv(M, BLOCK_SIZE_M)num_pid_n = tl.cdiv(N, BLOCK_SIZE_N)num_pid_in_group = GROUP_SIZE_M * num_pid_ngroup_id = pid // num_pid_in_groupfirst_pid_m = group_id * GROUP_SIZE_Mgroup_size_m = min(num_pid_m - first_pid_m, GROUP_SIZE_M)pid_m = first_pid_m + (pid % group_size_m)pid_n = (pid % num_pid_in_group) // group_size_moffs_am = (pid_m * BLOCK_SIZE_M + tl.arange(0, BLOCK_SIZE_M)) % Moffs_bn = (pid_n * BLOCK_SIZE_N + tl.arange(0, BLOCK_SIZE_N)) % Noffs_k = tl.arange(0, BLOCK_SIZE_K)a_ptrs = A + (offs_am[:, None] * stride_am + offs_k[None, :] * stride_ak)b_ptrs = B + (offs_k[:, None] * stride_bk + offs_bn[None, :] * stride_bn)As_ptrs = As + offs_am * stride_As_moffs_bsn = offs_bn // group_nBs_ptrs = Bs + offs_bsn * stride_Bs_naccumulator = tl.zeros((BLOCK_SIZE_M, BLOCK_SIZE_N), dtype=tl.float32)for k in range(0, tl.cdiv(K, BLOCK_SIZE_K)):a = tl.load(a_ptrs,mask=offs_k[None, :] < K - k * BLOCK_SIZE_K,other=0.0)b = tl.load(b_ptrs,mask=offs_k[:, None] < K - k * BLOCK_SIZE_K,other=0.0)k_start = k * BLOCK_SIZE_Koffs_ks = k_start // group_ka_s = tl.load(As_ptrs + offs_ks * stride_As_k)b_s = tl.load(Bs_ptrs + offs_ks * stride_Bs_k)if dot_dtype is not None:a = a.to(dot_dtype)b = b.to(dot_dtype)accumulator += tl.dot(a, b) * a_s[:, None] * b_s[None, :]a_ptrs += BLOCK_SIZE_K * stride_akb_ptrs += BLOCK_SIZE_K * stride_bkif C.dtype.element_ty == tl.bfloat16:c = accumulator.to(tl.bfloat16)elif C.dtype.element_ty == tl.float16:c = accumulator.to(tl.float16)else:c = accumulator.to(tl.float32)offs_cm = pid_m * BLOCK_SIZE_M + tl.arange(0, BLOCK_SIZE_M)offs_cn = pid_n * BLOCK_SIZE_N + tl.arange(0, BLOCK_SIZE_N)c_ptrs = C + stride_cm * offs_cm[:, None] + stride_cn * offs_cn[None, :]c_mask = (offs_cm[:, None] < M) & (offs_cn[None, :] < N)tl.store(c_ptrs, c, mask=c_mask)def get_config_dtype_str(dtype: torch.dtype,use_int4_w4a16: Optional[bool] = False,use_int8_w8a16: Optional[bool] = False,use_fp8_w8a8: Optional[bool] = False,use_mxfp4_w4a4: Optional[bool] = False) -> Optional[str]:if use_fp8_w8a8:return "fp8_w8a8"elif use_int8_w8a16:return "int8_w8a16"elif use_int4_w4a16:return "int4_w4a16"elif use_mxfp4_w4a4:return "mxfp4_w4a4"elif dtype == torch.float:# avoiding cases where kernel fails when float32 MoE# use fp16/bfloat16 configsreturn "float32"return Nonedef invoke_fused_moe_kernel(A: torch.Tensor,B: torch.Tensor,C: torch.Tensor,A_scale: Optional[torch.Tensor],B_scale: Optional[torch.Tensor],B_zp: Optional[torch.Tensor],topk_weights: Optional[torch.Tensor],sorted_token_ids: torch.Tensor,expert_ids: torch.Tensor,num_tokens_post_padded: torch.Tensor,mul_routed_weight: bool,top_k: int,config: dict[str, Any] = None,compute_type: tl.dtype = tl.bfloat16,use_fp8_w8a8: bool = True,use_int8_w8a8: bool = False,use_int8_w8a16: bool = False,use_int4_w4a16: bool = False,per_channel_quant: bool = False,block_shape: Optional[list[int]] = [128, 128],dot_dtype = None) -> None:if isinstance(dot_dtype, int) and dot_dtype == 1:dot_dtype = tl.bfloat16assert topk_weights is not None or not mul_routed_weightassert topk_weights is None or topk_weights.stride(1) == 1assert sorted_token_ids.stride(0) == 1if config is None:M = A.size(0)config_dtype = get_config_dtype_str(use_fp8_w8a8=use_fp8_w8a8,use_int8_w8a16=use_int8_w8a16,use_int4_w4a16=use_int4_w4a16,use_mxfp4_w4a4=False,dtype=A.dtype)get_config_func = functools.partial(try_get_optimal_moe_config,B.size(),B.size(),top_k,config_dtype,block_shape=block_shape,)config = get_config_func(M)# config = {# 'BLOCK_SIZE_K': 128,# 'BLOCK_SIZE_M': 64,# 'BLOCK_SIZE_N': 128,# 'GROUP_SIZE_M': 32,# 'num_warps': 4,# 'num_stages': 2# }if use_fp8_w8a8 or use_int8_w8a8:assert B_scale is not Noneassert (block_shape is Noneor triton.cdiv(B.size(-2), block_shape[0]) == B_scale.size(-2))assert (block_shape is Noneor triton.cdiv(B.size(-1), block_shape[1]) == B_scale.size(-1))elif use_int8_w8a16 or use_int4_w4a16:assert B_scale is not Noneassert block_shape is None or block_shape[0] == 0else:assert A_scale is Noneassert B_scale is NoneM = A.size(0)num_tokens = M * top_kEM = sorted_token_ids.size(0)if A.size(0) < config["BLOCK_SIZE_M"]:# optimize for small batch_size.# We assume that top_ids of each token is unique, so# so num_valid_experts <= batch_size <= BLOCK_SIZE_M,# and we can skip some invalid blocks.EM = min(sorted_token_ids.size(0),A.size(0) * top_k * config['BLOCK_SIZE_M'])grid = lambda META: (triton.cdiv(EM, META['BLOCK_SIZE_M']) * triton.cdiv(B.size(1), META['BLOCK_SIZE_N']), )config = config.copy()BLOCK_SIZE_K = config.pop("BLOCK_SIZE_K")if block_shape is not None:BLOCK_SIZE_K = min(BLOCK_SIZE_K, min(block_shape[0],block_shape[1]))fused_moe_kernel[grid](A,B,C,A_scale,B_scale,topk_weights,sorted_token_ids,expert_ids,num_tokens_post_padded,B.size(1),B.size(2),EM,num_tokens,A.stride(0),A.stride(1),B.stride(0),B.stride(2),B.stride(1),C.stride(1),C.stride(2),A_scale.stride(0)if A_scale is not None and A_scale.ndim == 2 else 0,A_scale.stride(1)if A_scale is not None and A_scale.ndim == 2 else 0,B_scale.stride(0)if B_scale is not None and B_scale.ndim >= 2 else 0,B_scale.stride(2)if B_scale is not None and B_scale.ndim == 3 else 0,B_scale.stride(1)if B_scale is not None and B_scale.ndim >= 2 else 0,0 if block_shape is None else block_shape[0],0 if block_shape is None else block_shape[1],MUL_ROUTED_WEIGHT=mul_routed_weight,top_k=top_k,compute_type=compute_type,use_fp8_w8a8=use_fp8_w8a8,use_int8_w8a8=use_int8_w8a8,use_int8_w8a16=use_int8_w8a16,per_channel_quant=per_channel_quant,BLOCK_SIZE_K=BLOCK_SIZE_K,**config,)@triton.jit
def write_zeros_to_output(c_ptr, stride_cm, stride_cn, pid_n, N, offs_token,token_mask, BLOCK_SIZE_M, BLOCK_SIZE_N,compute_type):accumulator = tl.zeros((BLOCK_SIZE_M, BLOCK_SIZE_N), dtype=compute_type)offs_cn = pid_n * BLOCK_SIZE_N + tl.arange(0, BLOCK_SIZE_N)c_ptrs = c_ptr + stride_cm * offs_token[:, None] + stride_cn * offs_cn[None, :]c_mask = token_mask[:, None] & (offs_cn[None, :] < N)tl.store(c_ptrs, accumulator, mask=c_mask)@triton.jit
def fused_moe_kernel(# Pointers to matricesa_ptr,b_ptr,c_ptr,a_scale_ptr,b_scale_ptr,topk_weights_ptr,sorted_token_ids_ptr,expert_ids_ptr,num_tokens_post_padded_ptr,# Matrix dimensionsN,K,EM,num_valid_tokens,# The stride variables represent how much to increase the ptr by when# moving by 1 element in a particular dimension. E.g. `stride_am` is# how much to increase `a_ptr` by to get the element one row down# (A has M rows).stride_am,stride_ak,stride_be,stride_bk,stride_bn,stride_cm,stride_cn,stride_asm,stride_ask,stride_bse,stride_bsk,stride_bsn,# Block size for block-wise quantizationgroup_n: tl.constexpr,group_k: tl.constexpr,# Meta-parametersBLOCK_SIZE_M: tl.constexpr,BLOCK_SIZE_N: tl.constexpr,BLOCK_SIZE_K: tl.constexpr,GROUP_SIZE_M: tl.constexpr,MUL_ROUTED_WEIGHT: tl.constexpr,top_k: tl.constexpr,compute_type: tl.constexpr,use_fp8_w8a8: tl.constexpr,use_int8_w8a8: tl.constexpr,use_int8_w8a16: tl.constexpr,per_channel_quant: tl.constexpr,
):"""Implements the fused computation for a Mixture of Experts (MOE) usingtoken and expert matrices.Key Parameters:- A: The input tensor representing tokens with shape (*, K), where '*' canbe any shape representing batches and K is the feature dimension ofeach token.- B: The stacked MOE weight tensor with shape (E, N, K), where E isthe number of experts, K is the input feature dimension, and N isthe output feature dimension.- C: The output cache tensor with shape (M, topk, N), where M is thetotal number of tokens post padding, topk is the number of timeseach token is repeated, and N is the output feature dimension.- sorted_token_ids: A tensor containing the sorted indices of tokens,repeated topk times and arranged by the expert index they areassigned to.- expert_ids: A tensor containing the indices of the expert for eachblock. It determines which expert matrix from B should be used foreach block in A.This kernel performs the multiplication of a token by its correspondingexpert matrix as determined by `expert_ids`. The sorting of`sorted_token_ids` by expert index and padding ensures divisibility byBLOCK_SIZE_M, which is necessary to maintain consistency in block matrixmultiplication across different blocks processed by the same expert."""dot_dtype = tl.bfloat16# dot_dtype = None# -----------------------------------------------------------# Map program ids `pid` to the block of C it should compute.# This is done in a grouped ordering to promote L2 data reuse.pid = tl.program_id(axis=0)num_pid_m = tl.cdiv(EM, BLOCK_SIZE_M)num_pid_n = tl.cdiv(N, BLOCK_SIZE_N)num_pid_in_group = GROUP_SIZE_M * num_pid_ngroup_id = pid // num_pid_in_groupfirst_pid_m = group_id * GROUP_SIZE_Mgroup_size_m = min(num_pid_m - first_pid_m, GROUP_SIZE_M)pid_m = first_pid_m + ((pid % num_pid_in_group) % group_size_m)pid_n = (pid % num_pid_in_group) // group_size_m# ----------------------------------------------------------# Create pointers for the first blocks of A and B.# We will advance this pointer as we move in the K direction# and accumulate# `a_ptrs` is a block of [BLOCK_SIZE_M, BLOCK_SIZE_K] pointers# `b_ptrs` is a block of [BLOCK_SIZE_K, BLOCK_SIZE_N] pointersnum_tokens_post_padded = tl.load(num_tokens_post_padded_ptr)if pid_m * BLOCK_SIZE_M >= num_tokens_post_padded:returnoffs_token_id = pid_m * BLOCK_SIZE_M + tl.arange(0, BLOCK_SIZE_M).to(tl.int64)offs_token = tl.load(sorted_token_ids_ptr + offs_token_id)token_mask = offs_token < num_valid_tokensoff_experts = tl.load(expert_ids_ptr + pid_m).to(tl.int64)if off_experts == -1:# -----------------------------------------------------------# Write back zeros to the output when the expert is not# in the current expert parallel rank.write_zeros_to_output(c_ptr, stride_cm, stride_cn, pid_n, N,offs_token, token_mask, BLOCK_SIZE_M,BLOCK_SIZE_N, compute_type)returnoffs_bn = (pid_n * BLOCK_SIZE_N +tl.arange(0, BLOCK_SIZE_N).to(tl.int64)) % Noffs_k = tl.arange(0, BLOCK_SIZE_K)a_ptrs = a_ptr + (offs_token[:, None] // top_k * stride_am +offs_k[None, :] * stride_ak)b_ptrs = b_ptr + off_experts * stride_be + (offs_k[:, None] * stride_bk +offs_bn[None, :] * stride_bn)if use_int8_w8a16:b_scale_ptrs = b_scale_ptr + off_experts * stride_bse + offs_bn[None, :] * stride_bsnb_scale = tl.load(b_scale_ptrs)if use_fp8_w8a8 or use_int8_w8a8:# block-wiseif group_k > 0 and group_n > 0:a_scale_ptrs = a_scale_ptr + (offs_token // top_k) * stride_asmoffs_bsn = offs_bn // group_nb_scale_ptrs = (b_scale_ptr + off_experts * stride_bse +offs_bsn * stride_bsn)# channel-wiseelif per_channel_quant:b_scale_ptrs = b_scale_ptr + off_experts * stride_bse + offs_bn[None, :] * stride_bsnb_scale = tl.load(b_scale_ptrs)# Load per-token scale for activationsa_scale_ptrs = a_scale_ptr + (offs_token // top_k) * stride_asma_scale = tl.load(a_scale_ptrs, mask=token_mask, other=0.0)[:,None]# tensor-wiseelse:a_scale = tl.load(a_scale_ptr)b_scale = tl.load(b_scale_ptr + off_experts)# -----------------------------------------------------------# Iterate to compute a block of the C matrix.# We accumulate into a `[BLOCK_SIZE_M, BLOCK_SIZE_N]` block# of fp32 values for higher accuracy.# `accumulator` will be converted back to fp16 after the loop.accumulator = tl.zeros((BLOCK_SIZE_M, BLOCK_SIZE_N), dtype=tl.float32)for k in range(0, tl.cdiv(K, BLOCK_SIZE_K)):# Load the next block of A and B, generate a mask by checking the# K dimension.a = tl.load(a_ptrs,mask=token_mask[:, None] &(offs_k[None, :] < K - k * BLOCK_SIZE_K),other=0.0)b = tl.load(b_ptrs,mask=offs_k[:, None] < K - k * BLOCK_SIZE_K,other=0.0)if dot_dtype is not None:a = a.to(dot_dtype)b = b.to(dot_dtype)# We accumulate along the K dimension.if use_int8_w8a16:accumulator = tl.dot(a, b.to(compute_type), acc=accumulator)elif use_fp8_w8a8 or use_int8_w8a8:if group_k > 0 and group_n > 0:k_start = k * BLOCK_SIZE_Koffs_ks = k_start // group_ka_scale = tl.load(a_scale_ptrs + offs_ks * stride_ask,mask=token_mask,other=0.0)b_scale = tl.load(b_scale_ptrs + offs_ks * stride_bsk)accumulator += tl.dot(a, b) * a_scale[:,None] * b_scale[None, :]else:if use_fp8_w8a8:# acc used to enable fp8_fast_accumaccumulator = tl.dot(a, b, acc=accumulator)else:accumulator += tl.dot(a, b)else:accumulator += tl.dot(a, b)# Advance the ptrs to the next K block.a_ptrs += BLOCK_SIZE_K * stride_akb_ptrs += BLOCK_SIZE_K * stride_bkif MUL_ROUTED_WEIGHT:moe_weight = tl.load(topk_weights_ptr + offs_token,mask=token_mask,other=0)accumulator = accumulator * moe_weight[:, None]if use_int8_w8a16:accumulator = (accumulator * b_scale).to(compute_type)elif use_fp8_w8a8 or use_int8_w8a8:if group_k > 0 and group_n > 0:accumulator = accumulator.to(compute_type)else:accumulator = (accumulator * a_scale * b_scale).to(compute_type)else:accumulator = accumulator.to(compute_type)# -----------------------------------------------------------# Write back the block of the outputoffs_cn = pid_n * BLOCK_SIZE_N + tl.arange(0, BLOCK_SIZE_N)c_ptrs = c_ptr + stride_cm * offs_token[:, None] + stride_cn * offs_cn[None, :]c_mask = token_mask[:, None] & (offs_cn[None, :] < N)tl.store(c_ptrs, accumulator, mask=c_mask)def w8a8_block_fp8_matmul_triton(q: torch.Tensor, kv: torch.Tensor, x: torch.Tensor, weight: torch.Tensor, x_scale: torch.Tensor, weight_scale: torch.Tensor, group_size: int) -> torch.Tensor:"""Triton实现"""from ._triton import w8a8_block_fp8_matmulout = w8a8_block_fp8_matmul(x, weight, x_scale, weight_scale)# 参考cpu实现,将output_sizes、q、kv抽取出来M = x.shape[0]N = weight.shape[0]N_0 = q.shape[-1]N_1 = kv.shape[-1]output_sizes = [N_0, N_1]q_out, kv_out = tuple(i.contiguous() for i in out.split(output_sizes, dim=-1))q.copy_(q_out)kv.copy_(kv_out)return