(一)从零搭建unity3d机械臂仿真-unity3d导入urdf模型
1.新建工程并加载模型
(1)unity中新建3d工程
(2)将机器人模型导入到unity3d中
导入开源Unity-Robotics-Hub的机械臂。
详细操作参考视频
ROS Unity URDF Import Testing Robot Motion
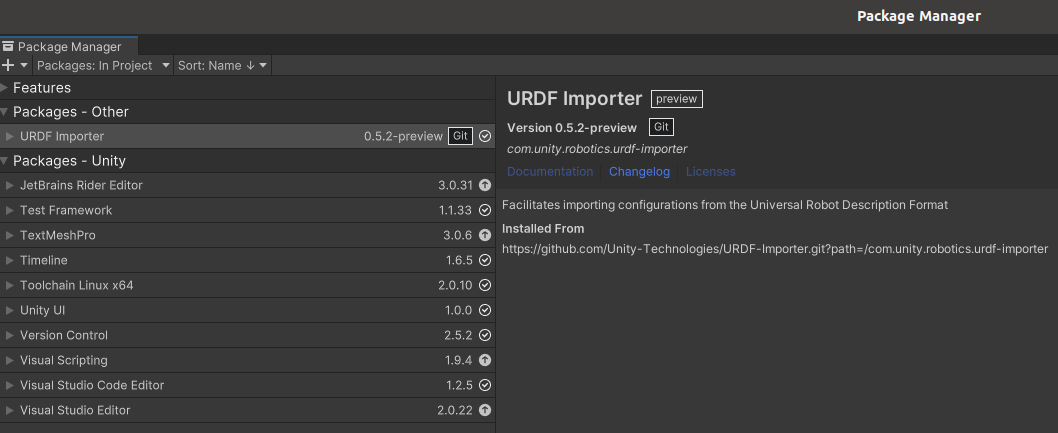
使用 URDF Importer工具
在 Unity 中,可以通过 Package Manager 直接安装 URDF Importer:
打开 Window > Package Manager。
点击 “+” 按钮,选择 “Add package from git URL…”。
输入:
https://github.com/Unity-Technologies/URDF-Importer.git?path=/com.unity.robotics.urdf-importer
点击 “Add” 安装1。
导入工具成功后如图
然后将模型文件夹URDF拷贝到Assets文件夹下选择
niryo_one.urdf,右键发现有
Import Robot from URDF选项。
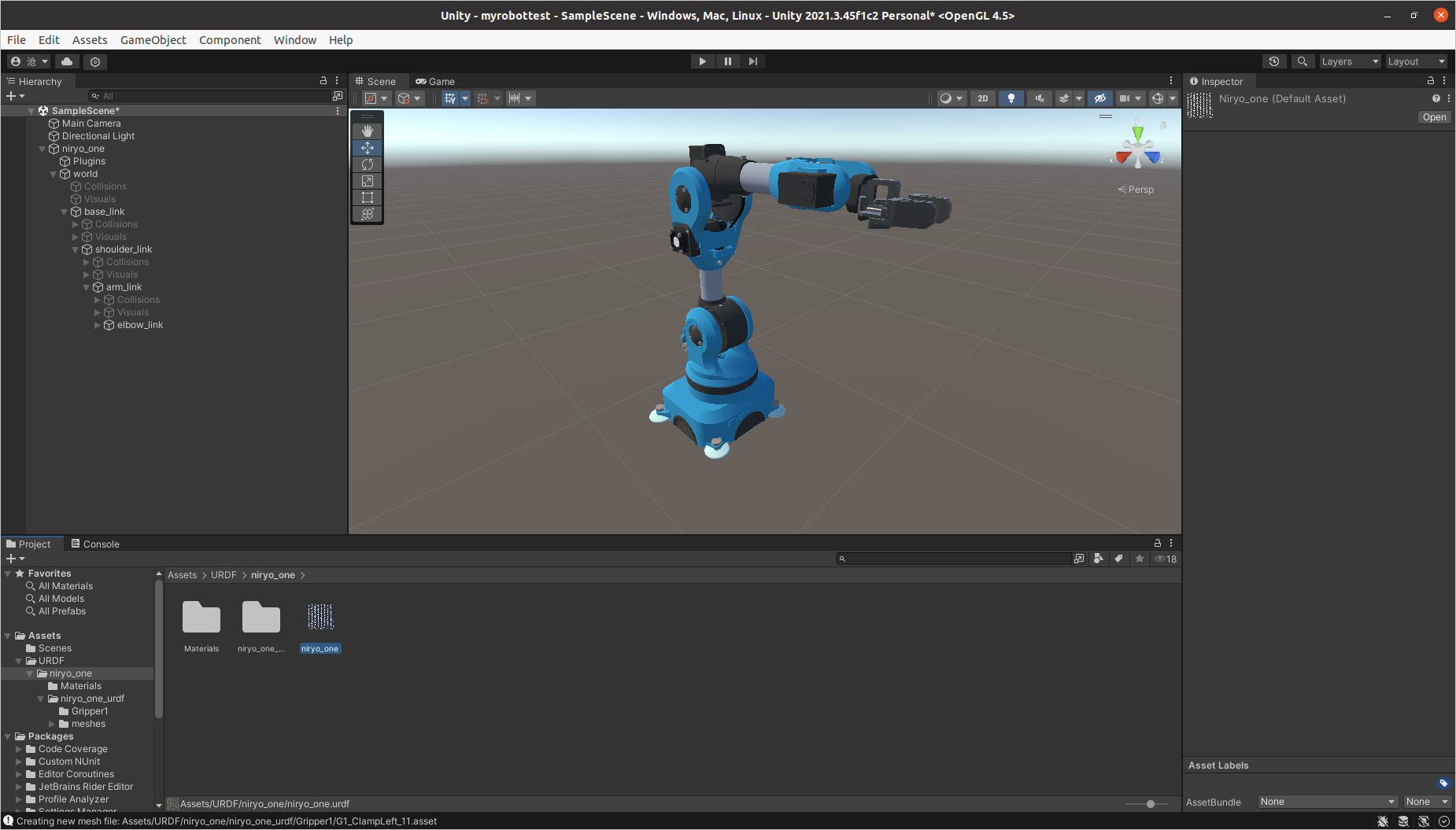
导入成功后如图。
参考:
(二)Unity3d-ROS联合仿真:运行Unity-Robotics-Hub