LeRobot(1)
Train
python lerobot/scripts/train.py \
policy=act \
env=aloha \
env.task=AlohaInsertion-v0 \
dataset_repo_id=lerobot/aloha_sim_insertion_human \
load_data一直报错,忘记截图了,反正是ssh报错,下不下来,网上搜了方法无法解决,估计和网络有关
换成手动下载到本地加载
具体先修改了下面这个参数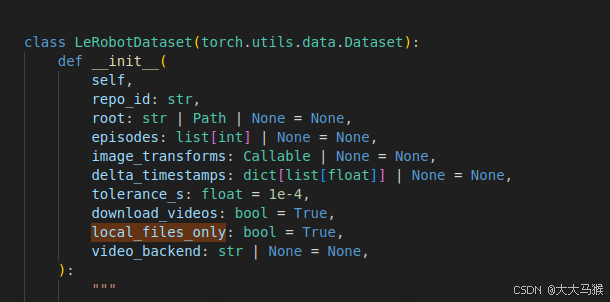
然后到lerobot (LeRobot)下载,按照下面,一定要第一步不然会报错
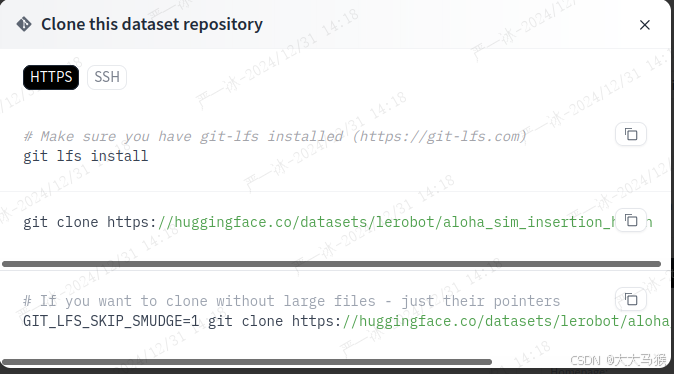
我下载到以下这个路径

然后就train开始了
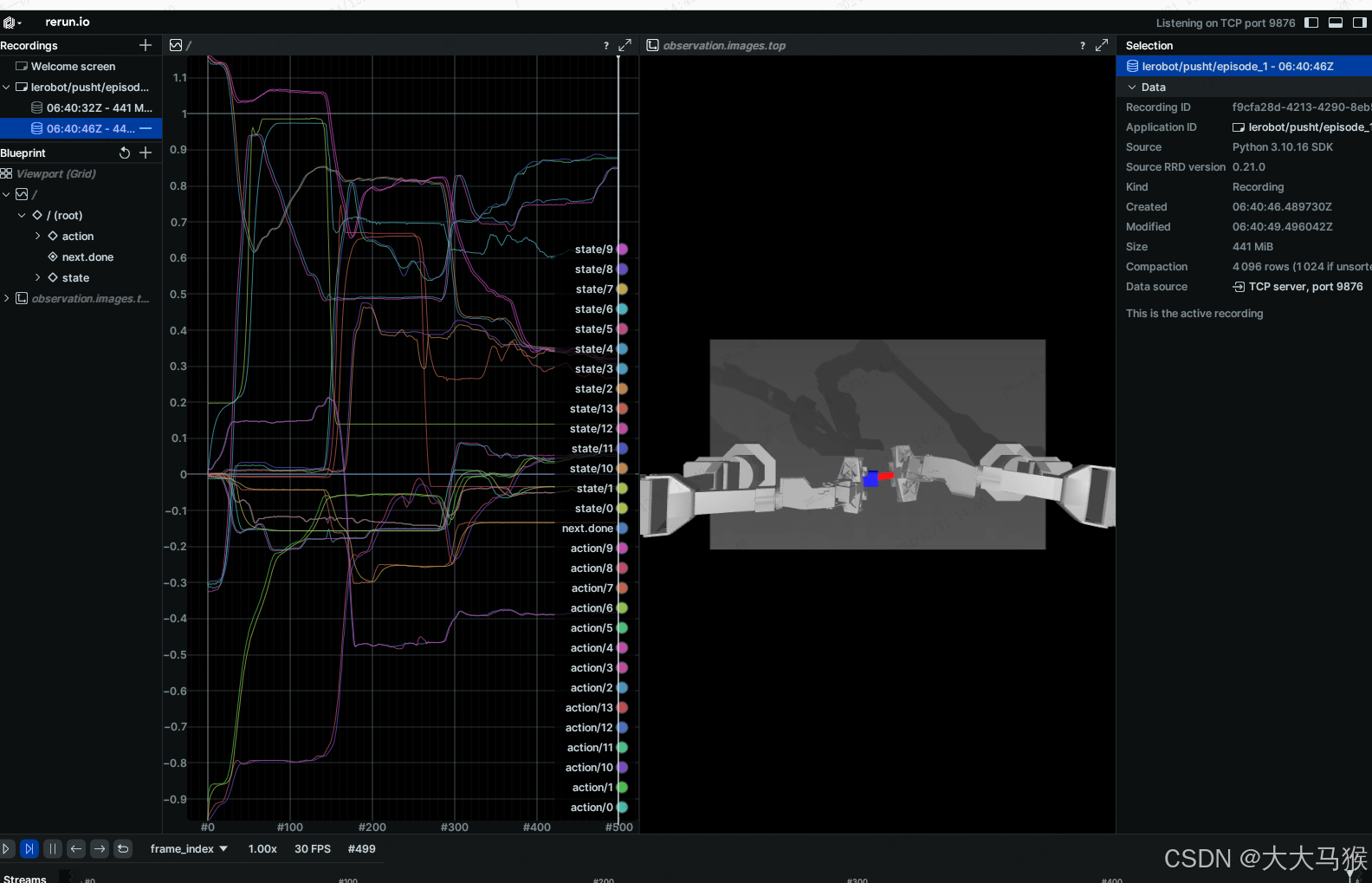
Visualize datasets
python lerobot/scripts/visualize_dataset.py --repo-id lerobot/pusht --root /home/fourier/.cache/huggingface/lerobot/lerobot/aloha_sim_insertion_human --local-files-only 1 --episode-index 1
换一个跑eval,下载训练好的模型diffusion_pusht
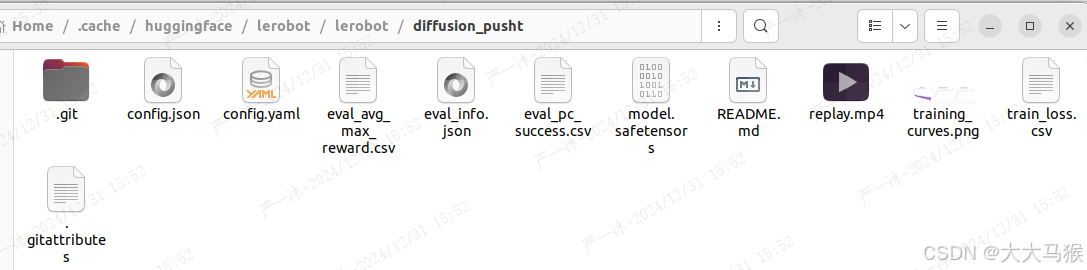
model.safetensors需要手动下载,通过git clone会把这个跳过
python lerobot/scripts/eval.py -p /home/fourier/.cache/huggingface/lerobot/lerobot/diffusion_pusht eval.n_episodes=10 eval.batch_size=10
生成结果:

然后把examples里面的py过一下,不同作用的程序,也有训练和推理的