腾势D9风光不再?中期改款能否及时“救火”
文/王俣祺

导语:腾势D9销量下滑了,这背后是MPV市场的整体没落还是众多新车的围追堵截?如今2025款腾势D9也来了,“加量不加价”的新车又能否逆转乾坤,重夺MPV市场霸主的地位?
腾势D9销量下滑的“真相”
回头看今年的MPV市场可以说是十分热闹,大批的新车型比如小鹏X9、理想MEGA等不断涌入,给市场带来了新的活力和竞争。然而从细分车型定位来看,传统的高端中大型MPV依然凭借其深厚的底蕴和稳定的产品力占据着销量前列。
在这场激烈的市场角逐中,腾势D9作为一款备受瞩目的新能源MPV,在2024年取得了诸多亮眼的成绩。这一年中,腾势D9在销量与保值率方面表现不俗,连续两年成为MPV销量与保值率的双料冠军,展现出强大的市场竞争力。
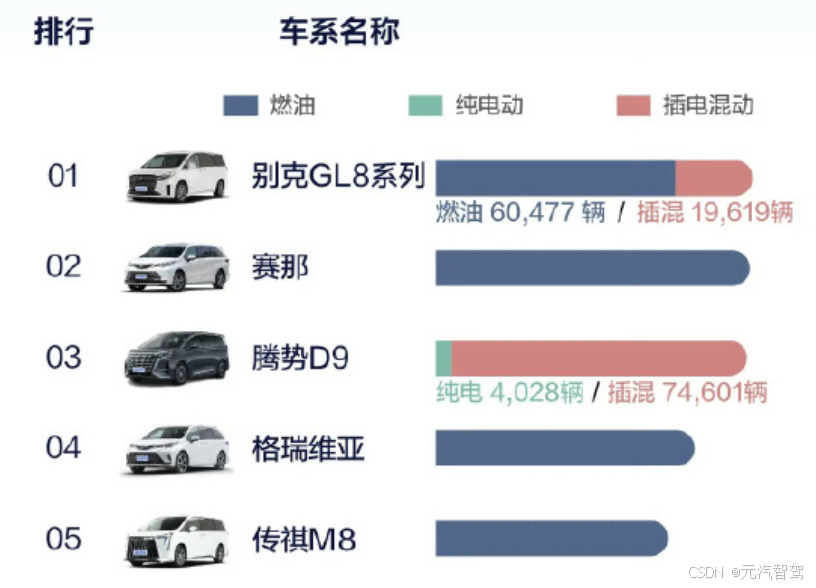
不过,在11月份,腾势D9的销量被别克GL8和丰田赛那超越。从网友的评价来看,这一结果其实并不是腾势D9在车型本身方面存在问题,而主要是因为消费者对即将推出的2025款腾势D9抱有很高的期待,大部分潜在消费者都处于一个“持币待购”的状态。
那么面对如此清晰,腾势D9自然也不会让消费者失望,在中期改款时首先就是对价格做出了调整,大打MPV价格战。其中,DM-i车型的售价与老款保持一致,而纯电版的起售门槛直降3万,这一价格策略不仅体现了腾势D9对市场变化的敏锐洞察,也为消费者提供了更具性价比的选择。
勇闯城中村的“天神之眼”
要说此次改款最大的亮点,还得是2025款腾势D9首次搭载并全系标配的“天神之眼”高阶智驾系统。车顶新增了前视800万像素双目摄像头与激光雷达,以及翼子板位置的侧摄像头,再加上全车高达32个感应器,包括激光雷达、环视摄像头、毫米波雷达和超声波雷达等硬件,为智驾功能提供了强大的硬件支持,实现了从传统L2级智驾到高阶智驾的重大跨越。

要知道比亚迪的这套“天神之眼”智驾系统的各项功能,在市面上所有MPV车型中都处于领先地位。在前两天官方发布的深圳城中村智驾视频中,腾势D9的表现真的是令人十分惊艳。在城中村的复杂路况下,新车依旧流畅地完成了变道博弈、智能绕行、拟人化控速等行为。在遇到照明不佳的十字路口并且侧向还有来车时,25款腾势D9也能提前识别并减速。不仅在面对各种横穿马路的行人时能够做到及时礼让,哪怕是在遇见“鬼探头”以及对向突然有侵占车道的特殊车辆时,也能做到迅速避让。充分展示了“天神之眼”智驾系统在复杂场景下的可靠性和精准性,绝对不亚于一位经验丰富的老司机在开车。
除了视频中所展现的功能,这套系统还具有一些独特的技术优势。它采用了先进的融合感知算法,能够对各种传感器采集到的数据进行高效处理和融合,从而更准确地识别周围环境和障碍物。同时,基于大规模量产车积累的海量数据,系统可以实现快速迭代,不断优化智驾性能,可以称得上是越用越好用。不过,目前“天神之眼”智驾系统依赖高精地图,需要逐个城市开通。但随着搭载车型的增多,数据积累也将更加丰富,智驾能力还是有望不断提升的。
MPV“顶流”的底气
腾势D9作为一款全能型 MPV,精准拿捏了商务与家庭出行的双重需求。对于商务人士而言,其外观与内饰的豪华感扑面而来。车内的全车座椅不仅宽大舒适,还具备多向电动调节、加热、通风及按摩功能。同时,先进的智能互联系统、超大尺寸中控屏以及高端音响设备,让车内办公与休闲娱乐两不误,轻松满足商务洽谈与出行的各种需求。而家庭用户选择腾势 D9,也是可以收获满满。宽敞的车内空间,可灵活多变的座椅布局,还有丰富的娱乐功能,比如后排独立娱乐屏、车载KTV等,轻松应对全家出行的各种场景。

而且,腾势作为比亚迪与奔驰的合资结晶,自诞生起便肩负着打造高品质新能源汽车的重任。历经时间的积累,在国内新能源领域已经成功塑造了良好的品牌形象与口碑,这份底蕴无疑为 2025 款腾势 D9 在豪华 MPV 市场增添了强大的助力,使其能够在众多竞品中脱颖而出,成为高净值用户展现身份地位与生活品味的不二之选。
同时,25款腾势D9在与别克 GL8、丰田赛那这些老牌 MPV强者 相比,也是优势尽显。就像智能驾驶领域,别克 GL8 和丰田赛那这些传统车型都还处于起步阶段,而腾势 D9 配备的“天神之眼”智驾系统,集成了高精度传感器与先进算法,能够实现智能跟车、自动泊车等多种功能,在MPV智能化浪潮中可谓是一马当先。而动力方面,腾势 D9 是纯电和插混“两手抓”。其搭载的第五代 DM 技术、e 平台 3.0 以及全新的 103kWh 刀片电池等三电技术,更是领先同级。
写在最后
值得一提的是,这次中期改款的2025 款腾势 D9 在加量不加价甚至降价的策略下,产品力得到全方位提升,更多贴心的舒适性配置、更强劲的性能表现以及更领先的智能化水准,使其性价比远超竞品,有望成为更多用户心目中的理想座驾。