OpenCV---特征检测算法(ORB,Oriented FAST and Rotated BRIEF)
ORB(Oriented FAST and Rotated BRIEF)是OpenCV中一种高效的特征检测与描述算法,由Ethan Rublee等人于2011年提出。它结合了FAST关键点检测的高效性和BRIEF描述符的简洁性,并通过改进解决了两者在旋转不变性和尺度不变性上的缺陷,成为SIFT、SURF等专利算法的理想替代方案,广泛应用于实时计算机视觉任务。
一、ORB算法的核心原理
ORB算法由两部分组成:Oriented FAST(带方向的FAST关键点检测) 和 Rotated BRIEF(旋转的BRIEF描述符)。
1. Oriented FAST:带方向的关键点检测
FAST(Features from Accelerated Segment Test)是一种快速角点检测算法,ORB对其进行了改进,使其具备旋转不变性和尺度不变性。
-
原始FAST的检测原理
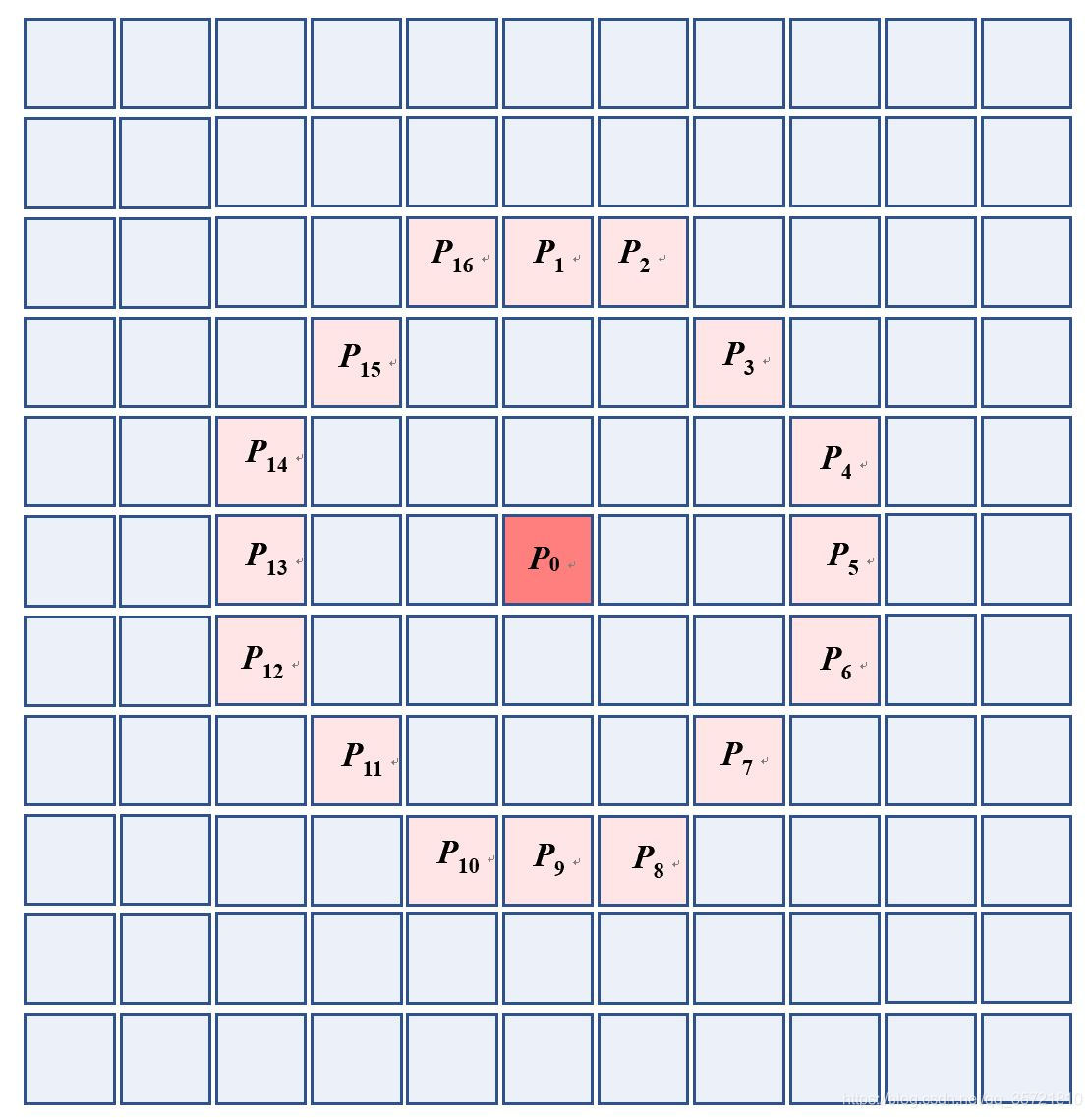
FAST的核心思想是:若一个像素与其周围足够多的邻域像素存在显著灰度差异,则该像素为关键点。具体步骤如下:- 以目标像素
p为中心,取半径为3的圆上16个邻域像素(标记为p1-p16); - 设
p的灰度值为Ip,定义阈值T(通常为Ip的10%-30%); - 若存在连续9个(或更多)邻域像素的灰度值满足
I > Ip + T或I < Ip - T,则p被视为关键点。
原始FAST的优势是检测速度极快(可跳过非候选像素),但存在两大缺陷:
- 无尺度不变性:无法处理图像缩放导致的特征尺寸变化;
- 无旋转不变性:对图像旋转敏感,同一特征在不同角度下可能被误判。
- 以目标像素
-
ORB对FAST的改进
ORB通过以下方式解决上述缺陷:(1)尺度不变性:图像金字塔
构建多层图像金字塔(不同尺度的图像集合),在每层独立检测FAST关键点。具体步骤:- 对原始图像进行下采样(如缩放因子
scaleFactor=1.2),生成nlevels层金字塔; - 在每层图像上检测FAST关键点,不同层的关键点对应不同尺度的特征;
- 最终将各层关键点映射回原始图像尺度,实现跨尺度特征匹配。
(2)旋转不变性:灰度质心法
为每个关键点分配一个主方向,使描述符能适应图像旋转。计算步骤:- 在关键点周围定义一个
31×31的邻域窗口; - 计算窗口内的灰度质心
(Cx, Cy):
Cx=∑xI(x,y)∑I(x,y),Cy=∑yI(x,y)∑I(x,y) Cx = \frac{\sum xI(x,y)}{\sum I(x,y)}, \quad Cy = \frac{\sum yI(x,y)}{\sum I(x,y)} Cx=∑I(x,y)∑xI(x,y),Cy=∑I(x,y)∑yI(x,y)
其中I(x,y)为像素(x,y)的灰度值; - 关键点中心
(Ox, Oy)到质心(Cx, Cy)的向量方向即为主方向:
θ=arctan2(Cy−Oy,Cx−Ox) \theta = \arctan2(Cy - Oy, Cx - Ox) θ=arctan2(Cy−Oy,Cx−Ox)
- 对原始图像进行下采样(如缩放因子
2. Rotated BRIEF:旋转的二进制描述符
BRIEF(Binary Robust Independent Elementary Features)是一种二进制描述符,ORB对其改进以支持旋转不变性。
-
原始BRIEF的原理
BRIEF通过比较关键点邻域内随机点对的灰度值生成二进制串(0/1)。步骤如下:- 在关键点周围定义一个
S×S的正方形窗口; - 随机选择
N对(如256对)像素点(p_i, q_i); - 对每对点,若
I(p_i) > I(q_i)则记为1,否则记为0,最终生成N位二进制串。
原始BRIEF的优势是计算速度快(仅需比较和位运算)、存储成本低(256位=32字节),但缺陷是:
- 无旋转不变性:窗口固定,图像旋转后点对关系改变,描述符失效;
- 对噪声敏感:随机点对可能包含噪声像素,导致描述符稳定性差。
- 在关键点周围定义一个
-
ORB对BRIEF的改进
ORB通过以下方式优化BRIEF:(1)旋转不变性:方向对齐
利用Oriented FAST计算的主方向θ,对BRIEF的采样窗口进行旋转,使点对分布始终与关键点方向一致。旋转矩阵为:
[cosθ−sinθsinθcosθ] \begin{bmatrix} \cos\theta & -\sin\theta \\ \sin\theta & \cos\theta \end{bmatrix} [cosθsinθ−sinθcosθ]
旋转后的点对坐标确保了描述符在图像旋转时的一致性。(2)稳定性优化:rBRIEF
通过统计学习从大量点对中筛选出鲁棒性更强的组合:- 在大量训练图像上生成所有可能的点对;
- 选择那些在图像旋转、噪声干扰下仍能保持稳定的点对;
- 最终保留256对点,形成更具区分性的描述符。
二、ORB的优势与性能对比
与传统特征算法(如SIFT、SURF)相比,ORB的核心优势如下:
| 特性 | ORB | SIFT | SURF |
|---|---|---|---|
| 速度 | 极快(实时性) | 较慢 | 中等 |
| 旋转不变性 | 支持 | 支持 | 支持 |
| 尺度不变性 | 支持(金字塔) | 支持(金字塔) | 支持(金字塔) |
| 描述符类型 | 二进制(32字节) | 浮点型(128字节) | 浮点型(64/128字节) |
| 专利限制 | 无(免费商用) | 有 | 有 |
| 光照鲁棒性 | 较好 | 好 | 好 |
| 噪声鲁棒性 | 中等 | 好 | 好 |
ORB的速度优势使其成为实时场景(如SLAM、实时跟踪)的首选,而无专利限制使其在工业界应用更广泛。
三、OpenCV中ORB的C++实现
OpenCV对ORB算法进行了高效封装,以下是完整的C++实现示例,包括关键点检测、描述符计算、特征匹配及结果可视化。
1. 环境配置
- 依赖:OpenCV 4.0+(需包含
opencv_core、opencv_features2d、opencv_highgui模块); - 编译:需链接OpenCV库(如
-lopencv_core -lopencv_features2d -lopencv_highgui)。
2. 代码实现
#include <opencv2/opencv.hpp>
#include <iostream>using namespace cv;
using namespace std;// 全局变量用于缩放
double scale = 0.5; // 初始缩放比例
Mat displayImage; // 用于显示的图像// 鼠标滚轮事件回调函数
void onMouseWheel(int event, int x, int y, int flags, void* userdata) {if (event == EVENT_MOUSEWHEEL) {// 滚轮向上滚动,放大图像if (flags > 0) {scale *= 1.1;}// 滚轮向下滚动,缩小图像else {scale /= 1.1;}// 限制缩放范围if (scale < 0.1) scale = 0.1;if (scale > 3.0) scale = 3.0;// 计算缩放后的图像尺寸int newWidth = static_cast<int>(displayImage.cols * scale);int newHeight = static_cast<int>(displayImage.rows * scale);// 缩放图像Mat resized;resize(displayImage, resized, Size(newWidth, newHeight));// 显示缩放后的图像imshow("ORB特征匹配结果(鼠标滚轮缩放)", resized);}
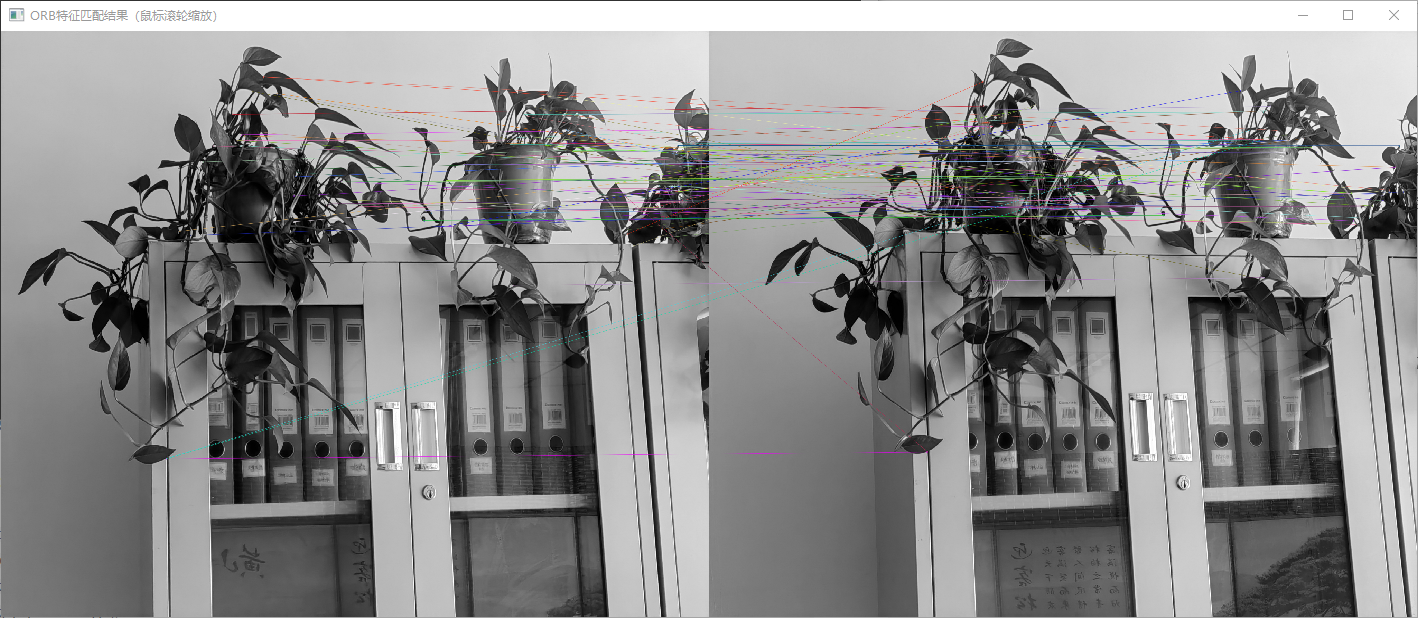
}int main() {// 1. 读取图像(灰度图)Mat img1 = imread("image7.jpeg", IMREAD_GRAYSCALE);Mat img2 = imread("image8.jpeg", IMREAD_GRAYSCALE);if (img1.empty() || img2.empty()) {cerr << "无法读取图像,请检查路径!" << endl;return -1;}// 2. 初始化ORB检测器Ptr<ORB> orb = ORB::create(1000, // nfeatures1.2f, // scaleFactor8, // nlevels31, // edgeThreshold0, // firstLevel2, // WTA_KORB::HARRIS_SCORE, // scoreType31 // patchSize);// 3. 检测关键点并计算描述符vector<KeyPoint> kp1, kp2;Mat des1, des2;orb->detectAndCompute(img1, noArray(), kp1, des1);orb->detectAndCompute(img2, noArray(), kp2, des2);cout << "图像1检测到" << kp1.size() << "个关键点" << endl;cout << "图像2检测到" << kp2.size() << "个关键点" << endl;// 4. 特征匹配(使用暴力匹配器)Ptr<BFMatcher> matcher = BFMatcher::create(NORM_HAMMING, true);vector<DMatch> matches;matcher->match(des1, des2, matches);// 5. 筛选匹配结果sort(matches.begin(), matches.end(), [](const DMatch& a, const DMatch& b) {return a.distance < b.distance;});vector<DMatch> good_matches(matches.begin(), matches.begin() + min(100, (int)matches.size()));// 6. 绘制匹配结果drawMatches(img1, kp1, img2, kp2,good_matches, displayImage,Scalar::all(-1), Scalar::all(-1),vector<char>(), DrawMatchesFlags::NOT_DRAW_SINGLE_POINTS);// 7. 创建可调节大小的窗口namedWindow("ORB特征匹配结果(鼠标滚轮缩放)", WINDOW_NORMAL); // WINDOW_NORMAL允许调整窗口大小// 设置初始窗口大小(适中的尺寸)int initWidth = static_cast<int>(displayImage.cols * scale);int initHeight = static_cast<int>(displayImage.rows * scale);resizeWindow("ORB特征匹配结果(鼠标滚轮缩放)", initWidth, initHeight);// 注册鼠标滚轮事件回调setMouseCallback("ORB特征匹配结果(鼠标滚轮缩放)", onMouseWheel);// 显示初始缩放后的图像Mat initialDisplay;resize(displayImage, initialDisplay, Size(initWidth, initHeight));imshow("ORB特征匹配结果(鼠标滚轮缩放)", initialDisplay);waitKey(0);// 保存原始大小的匹配结果imwrite("orb_matches.jpg", displayImage);return 0;
}运行结果
3. 代码解析
- 图像读取:使用
imread以灰度模式加载图像(特征检测通常基于灰度图); - ORB初始化:
ORB::create参数可根据场景调整(如nfeatures控制特征点数量,scaleFactor影响尺度适应性); - 关键点与描述符:
detectAndCompute同时完成检测与描述符计算,返回KeyPoint(含位置、尺度、方向等信息)和Mat(描述符矩阵); - 特征匹配:
BFMatcher采用暴力匹配,NORM_HAMMING适用于二进制描述符,crossCheck=true确保匹配双向有效; - 结果筛选:按匹配距离(汉明距离)排序,保留最优匹配以减少误匹配;
- 可视化:
drawMatches绘制匹配对,直观展示特征对应关系。
四、参数调优技巧
ORB的性能很大程度上依赖参数设置,以下是关键参数的调优建议:
-
nfeatures:
- 增大该值可检测更多特征点(适合纹理丰富的图像),但会增加计算耗时;
- 减小该值可提升速度(适合实时场景),但可能丢失关键特征。
-
scaleFactor:
- 取值接近1(如1.1)时,金字塔层间差异小,尺度鲁棒性更好,但层数
nlevels需相应增加; - 取值较大(如1.5)时,层数可减少,速度提升,但尺度适应性下降。
- 取值接近1(如1.1)时,金字塔层间差异小,尺度鲁棒性更好,但层数
-
edgeThreshold:
- 边缘阈值应略大于
patchSize(如patchSize=31时,edgeThreshold=31),避免检测边缘处不稳定的关键点。
- 边缘阈值应略大于
-
scoreType:
ORB_HARRIS_SCORE(默认):用Harris角点评分,关键点分布更均匀;ORB_FAST_SCORE:用FAST评分,速度更快,但关键点可能聚集。
-
patchSize:
- 增大值(如40)可提升描述符对噪声的鲁棒性,但计算量增加;
- 减小值(如20)适合小目标或高分辨率图像。
五、应用场景与优化策略
1. 典型应用场景
- 实时目标跟踪:ORB的高速特性使其可用于实时跟踪(如无人机追踪、视频监控);
- SLAM(同步定位与地图构建):ORB-SLAM系列算法基于ORB实现实时定位与地图构建;
- 图像拼接:通过匹配ORB特征实现多图拼接(如全景图生成);
- 目标识别:结合ORB特征与分类器(如SVM)实现快速目标识别。
2. 优化策略
-
误匹配去除:使用RANSAC算法剔除误匹配(通过
findHomography计算单应矩阵筛选内点);vector<Point2f> pts1, pts2; for (auto& m : good_matches) {pts1.push_back(kp1[m.queryIdx].pt);pts2.push_back(kp2[m.trainIdx].pt); } vector<uchar> inliers; findHomography(pts1, pts2, RANSAC, 5.0, inliers); // 保留内点匹配 vector<DMatch> ransac_matches; for (int i = 0; i < inliers.size(); ++i) {if (inliers[i]) ransac_matches.push_back(good_matches[i]); } -
多线程加速:在OpenCV中启用多线程(
setUseOptimized(true)和setNumThreads(n)),提升检测与匹配速度; -
特征点筛选:通过
KeyPoint::response(响应值)筛选高置信度关键点,减少冗余计算。
ORB算法通过融合Oriented FAST和Rotated BRIEF,在保持高效性的同时实现了旋转与尺度不变性,成为OpenCV中实时特征匹配的标杆算法。其无专利限制、速度快、存储成本低的特点,使其在工业界和学术界均有广泛应用。通过合理调参和优化策略,ORB可满足从实时跟踪到SLAM等多种复杂场景的需求,是计算机视觉工程师必备的核心工具之一。