AAAI论文速递 | NEST:超图小世界网络让自动驾驶轨迹预测更精准
本文选自gongzhonghao【图灵学术SCI论文辅导】
关注我们,掌握更多顶会顶刊发文资讯
1.导读
1.1 论文基本信息
论文标题:NEST: A Neuromodulated Small-world Hypergraph Trajectory Prediction Model for Autonomous Driving
作者: Chengyue Wang, Haicheng Liao, Bonan Wang, Yanchen Guan, Bin Rao, Ziyuan Pu, Zhiyong Cui, Cheng-Zhong Xu, Zhenning Li
通讯作者:Zhenning Li
作者单位:澳门大学、东南大学、北京航空航天大学
发表会议:The Thirty-Ninth AAAI Conference on Artificial Intelligence (AAAI 2025)
论文链接:https://ojs.aaai.org/index.php/AAAI/article/view/32064
2.论文概述
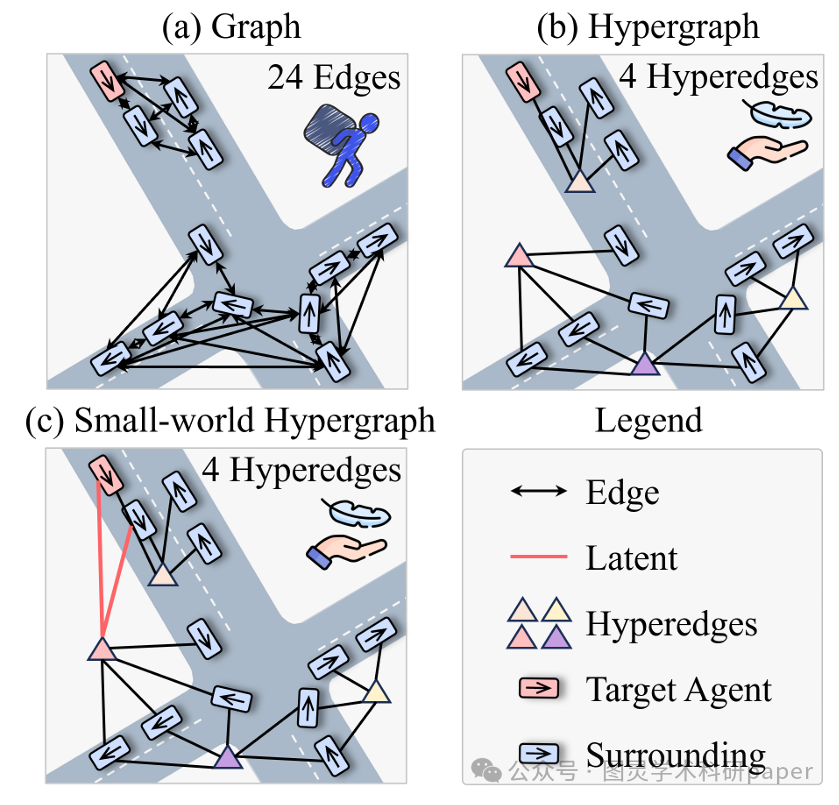
NEST模型是专为自动驾驶环境下的轨迹预测而设计的新型框架。它通过将小世界网络(Small-world Networks)与超图(Hypergraphs)相结合,并引入神经调节器(Neuromodulator),旨在解决传统模型在处理复杂交通场景时所面临的诸多挑战。该模型的核心创新在于其交互建模能力,能够高效、准确地捕捉交通参与者(车辆、行人、骑行者)之间错综复杂的关系。
2.1 模型核心理念
NEST模型的核心在于模仿人类驾驶员的适应能力,动态地调整对交通场景中交互关系的理解。它利用小世界网络的特性,高效地捕捉近距离和远距离的交通参与者之间的相互影响,而超图则能够将多个交通参与者作为一个整体进行建模,更好地反映群体行为。
2.2 解决的主要问题
论文旨在解决传统轨迹预测模型在以下几个方面的不足:
实时性处理不足:在复杂的、高密度的交通流中,传统模型往往难以进行实时有效的计算。
非线性和不确定性捕捉能力弱:交通环境中的突然停车、不规律驾驶行为以及行人、骑行者的不确定性运动,使得交通动态呈现高度的非线性,传统模型难以准确建模。
交互建模效率低下:在高密度城市环境中,交通参与者种类繁多,交互关系呈指数级增长,传统的一对一图模型效率低下。
缺乏时间动态性建模:许多模型依赖静态快照,未能有效捕捉交互关系随时间演变的过程。
2.3 关键贡献
NEST模型提出了三个主要贡献:
引入动态小世界网络:设计了一种动态调整的小世界网络,能够同时捕捉交通参与者之间的局部和长距离交互。该网络通过神经调节器,能够根据上下文信息自适应地调整,增强了模型在多变交通场景下的适应性。
构建新型超图神经网络:提出了一种新颖的超图神经网络(HGNN),其独特的超边集结构能够结合不同类型的关系,为建模复杂多样的交互动态提供了一个高效的框架。
全面的性能验证:通过在nuScenes、MoCAD和HighD等多个真实世界数据集上的广泛验证,证明了NEST模型在各种交通场景下均优于现有方法,展示了其卓越的泛化能力、效率和可靠性
3.研究背景及相关工作
轨迹预测是自动驾驶领域的核心技术之一,其发展历程伴随着深度学习技术的进步。论文在回顾相关工作时,清晰地梳理了该领域的演变,并指出了不同方法存在的局限性。
3.1 早期方法:基于时间序列的预测
核心思想:将轨迹预测视为时间序列预测问题。
代表模型:循环神经网络(RNN)和长短期记忆网络(LSTM)被用作编解码器。
里程碑式工作:Alahi等人提出的Social LSTM模型首次将“社会力”概念引入轨迹预测,强调了理解智能体之间交互的重要性。
局限性:这种方法主要关注时间序列数据本身,对复杂的空间交互和动态变化考虑不足。
3.2 中期方法:基于注意力和网格的方法
核心思想:引入注意力机制,以捕捉智能体之间复杂的交互。
代表模型:Nettraj模型引入时空注意力机制和滑动上下文窗口,捕捉短期和长期交互。
局限性:这些方法通常依赖于基于网格的方法,将场景分割成固定的网格,这限制了它们在非结构化道路拓扑中的应用。
3.3 近期方法:基于图神经网络(GNNs)的预测
核心思想:
使用图神经网络,尤其适用于在非结构化和复杂的城市环境中建模交互。
代表模型:
SFEM-GCN模型结合了三种图结构来捕捉语义、位置和速度信息;MTP-GO模型使用时间图编码场景信息;Social Soft Attention GCN模型处理智能体与环境之间的交互。
局限性:
关系建模局限: GNNs通常侧重于一对一的关系,可能忽略更广泛的群体动态和交通行为的内在联系。
效率与计算瓶颈: 在高密度环境中,交互的智能体数量众多,导致计算效率和计算资源成为显著问题。尽管GNNs比其他模型提供了更全面的交互表示,但在完全捕捉现实世界交通场景的复杂性和动态交互方面仍然存在不足。
4.实验设计和方法
NEST模型的创新之处在于其精巧的架构和新颖的模块设计。论文详细阐述了模型的整体框架和各个关键模块的实现细节。
4.1 问题公式化
输入:
过去时间步的历史数据X(包括坐标、速度、加速度)和高清地图M。
目标:
预测目标智能体在未来tf时间步的轨迹Y。
不确定性处理:
模型通过生成多个预测轨迹Y=[Y_1, Y_2, ..., YK]来应对不确定性,每个轨迹对应一个具有相关概率的意图模式。
预测表示:
每个时间步的预测Yit由拉普拉斯分布的参数表示,包括坐标(xit, yit)和反映运动不确定性的尺度参数。
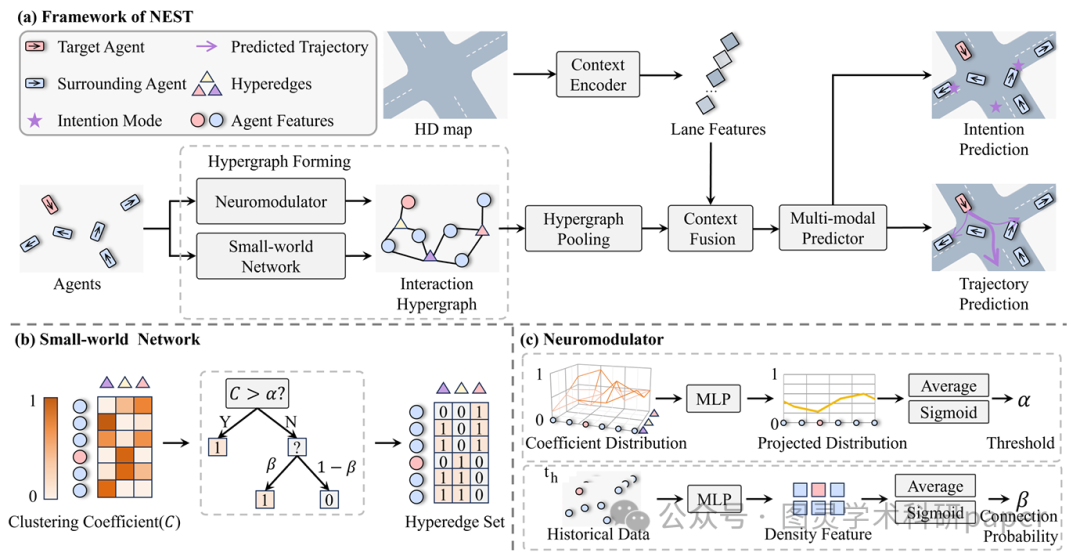
4.2 模型总览
Hypergraph Forming模块:
这是模型的核心,它利用神经调节器和小世界网络来构建交互超图。
Hypergraph Pooling模块:
该模块基于交互超图。它采用迭代的“顶点到超边”和“超边到顶点”池化,以高效地聚合信息。
Context Fusion模块:
将高清地图M中的车道特征与交互特征进行融合,生成一个综合的上下文特征。
Multi-modal Predictor模块:
使用K个生成器为每个意图模式预测未来轨迹。
4.3 关键模块的详细设计
超图构建(Hypergraph Forming):
超图定义:超图和超边集构成。顶点代表交通智能体,超边代表交互组。
小世界网络(Small-world Network):
原理:借鉴Newman-Watts (NW)模型,利用小世界网络的高聚类性和短路径长度特性,捕捉局部和长距离交互。
实现:通过计算每个智能体的聚类系数来确定其在交互组中的成员身份。聚类系数大于等于阈值alpha则确定连接,否则为不确定连接。
超边生成:最终的超边集mathcal由小世界网络根据顶点特征、阈值alpha和连接概率beta生成。
神经调节器(Neuromodulator):
作用:动态调整小世界网络,使其能够响应不断变化的交通状况。
参数:调节器产生两个关键参数——阈值alpha、beta。
阈值alpha:通过分析聚类系数矩阵的分布,利用多层感知机(MLP)和Sigmoid函数生成,用于确定哪些智能体明确属于一个交互组。
连接概率:通过智能体特征mathcal中的交通密度信息,利用MLP和Sigmoid函数生成,用于处理高密度交通中可能存在的额外智能体连接。
5. 实验结果分析
论文通过在多个真实世界数据集上进行广泛实验,验证了NEST模型的有效性和优越性。实验结果以表格形式展示了与现有先进方法的对比。
数据集:
nuScenes、MoCAD、HighD。这些数据集涵盖了多样化的交通场景,包括城市街道、高速公路等,包含了车辆、行人、骑行者等多种交通参与者。
评估指标:
minADEk:最小平均位移误差(Minimum Average Displacement Error),k为预测模式的数量。衡量预测轨迹与真实轨迹之间的平均距离。
minFDEk:最小最终位移误差(Minimum Final Displacement Error),k为预测模式的数量。衡量预测轨迹终点与真实轨迹终点之间的距离。
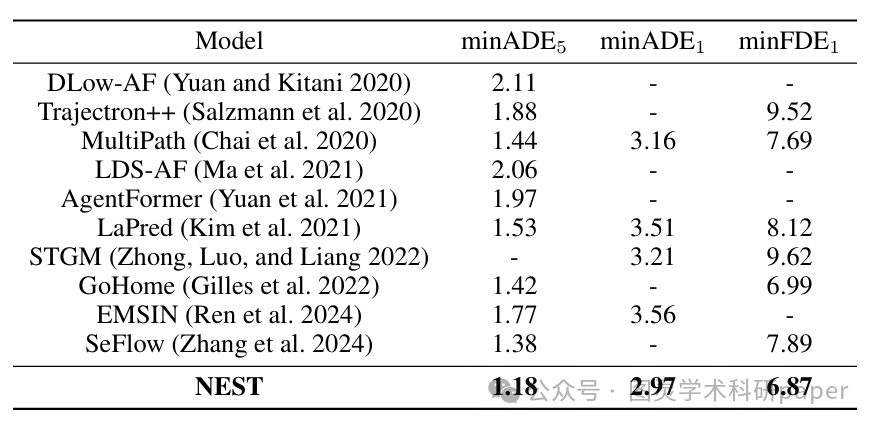
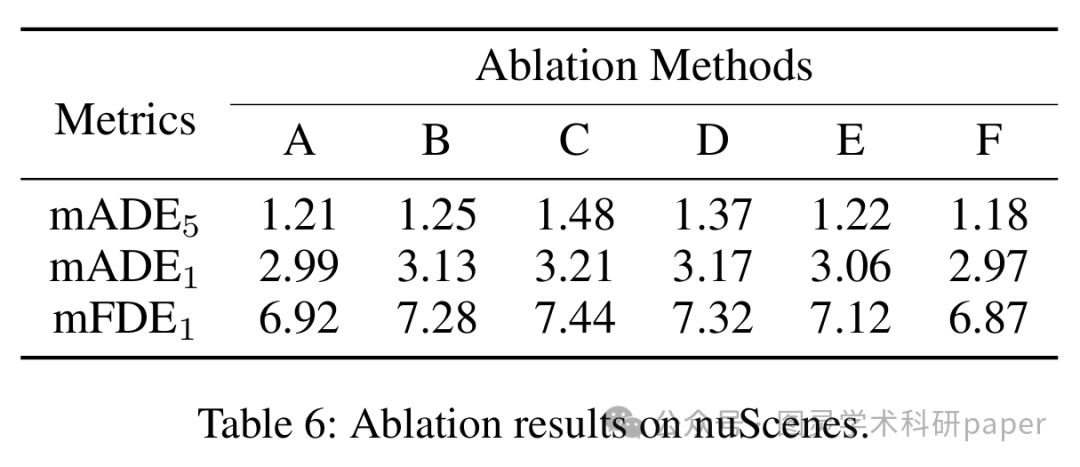
5.1 实验结果
nuScenes数据集:
在minADE5和minFDE5指标上,NEST模型均表现出最优性能,minADE5为1.18,minFDE5为2.97,显著优于所有对比模型,如Trajectron++、MultiPath、AgentFormer等。
这表明NEST模型在多模态预测任务中,能够更准确地捕捉到未来可能发生的多种轨迹,并能更好地预测最终的停车位置。
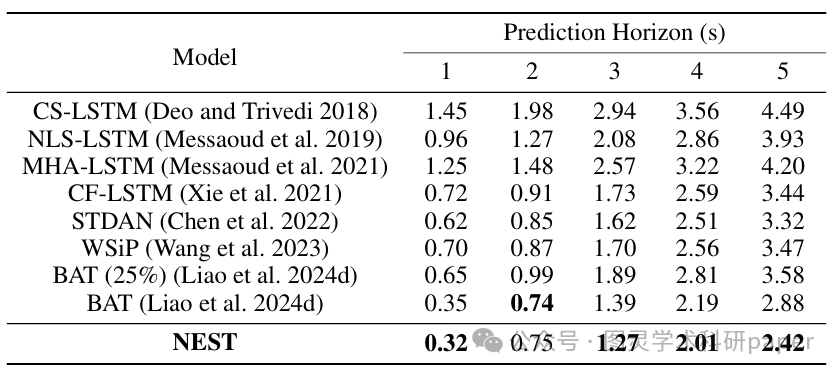
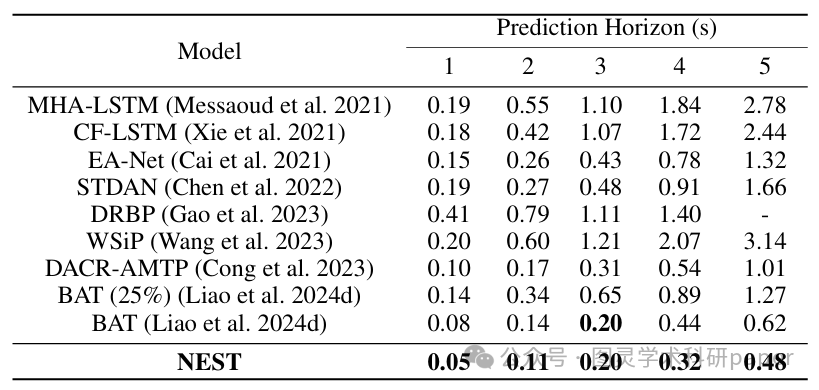
MoCAD数据集:
在不同的预测时间范围内(1s、2s、3s、4s、5s),NEST模型在minADE和minFDE指标上均取得了最佳结果。例如,在5s的预测时段,NEST的minADE为0.74,minFDE为2.42,而次优模型BAT(Liao et al. 2024d)的minADE为0.87,minFDE为2.56。
这进一步证明了NEST模型在不同时间尺度上对交通轨迹预测的稳定性和准确性,特别是在长期预测中表现出更强的优势。
5.2 分析总结
优越性:NEST模型在各种交通场景和不同数据集上持续优于现有方法,这得益于其独特的交互建模方式。
泛化能力:模型在不同数据集上的优异表现,证明了其强大的泛化能力和适应性,能够有效地应用于多种复杂的交通环境。
效率与可靠性:论文虽然没有直接给出运行时间数据,但在摘要和方法部分反复强调其在处理密集交通时的效率优势,实验结果的优异性能也间接证明了其作为鲁棒解决方案的可靠性。
6.论文总结展望
本篇论文提出了一种新颖的自动驾驶轨迹预测模型——NEST,它通过集成小世界网络、超图和神经调节器,有效解决了传统模型在处理复杂、动态和高密度交通场景时面临的挑战。
6.1 主要贡献回顾
NEST模型的核心在于其独特的超图形成模块,该模块能够动态地建模交通参与者之间的复杂交互。
小世界网络的设计有效地捕捉了局部和长距离的相互影响,而超图则高效地表示了群体行为。
神经调节器的引入为模型提供了类似人类驾驶员的适应能力,使其能够根据实时的交通状况调整网络结构,增强了模型的鲁棒性和泛化能力。
在nuScenes、MoCAD和HighD等真实世界数据集上的广泛实验,有力地证明了NEST模型在预测准确性方面优于目前最先进的方法。
6.2 未来展望
尽管NEST模型在多个方面取得了显著成果,但未来的研究仍有许多值得探索的方向。例如,可以进一步探索如何将更多的上下文信息(如交通信号、天气状况)融入模型,以提升其在更极端或罕见场景下的预测性能。
此外,可以研究更高效的超图池化和信息聚合机制,以进一步降低模型在高密度交通流中的计算复杂度,使其更适用于车载实时计算平台。
最后,可以考虑将NEST模型与其他自动驾驶任务(如决策规划)更紧密地结合起来,形成一个更完整的感知-预测-决策系统,从而在实际应用中发挥更大的价值。
本文选自gongzhonghao【图灵学术SCI论文辅导】
关注我们,掌握更多顶会顶刊发文资讯