基于51单片机的温控风扇Protues仿真设计
目录
一、设计背景
二、设计功能
三、仿真实现
四、代码实现
五、总结
一、设计背景
在现代社会中,风扇被广泛的应用,发挥着举足轻重的作用,如夏天人们用的散热风扇、工业生产中大型机械中的散热风扇以及现在笔记本电脑上广泛使用的智能CPU风扇等。而随着温度控制技术的发展,为了降低风扇运转时的噪音以及节省能源等,温控风扇越来越受到重视并被广泛的应用。
随着单片机在各个领域的广泛应用,许多用单片机作控制的温度控制系统也应运而生,如基于单片机的温控风扇系统。它使风扇根据环境温度的变化实现自动启停,使风扇转速随着环境温度的变化而变化,实现了风扇的智能控制。它的设计为现代社会人们的生活以及生产带来了诸多便利,在提高人们的生活质量、生产效率的同时还能节省风扇运转所需的能量。因此,基于51单片机的温控风扇设计具有重要社会意义。
二、设计功能
本文设计了基于单片机的温控风扇系统,用单片机为控制器,利用温度传感器DS18B20作为温度采集元件,并根据采集到的温度,通过两个三极管驱动风扇电机。根据检测到的温度与系统设定的温度比较实现风扇电机的自动启动和停止,并能根据温度的变化自动改变风扇电机的转速档位,同时用LED八段数码管显示检测到的温度与当前档位。系统的预设温度的设置是通过三个独立按键来实现的,一个是设置按键,一个是增大预设温度,一个是减小预设温度。
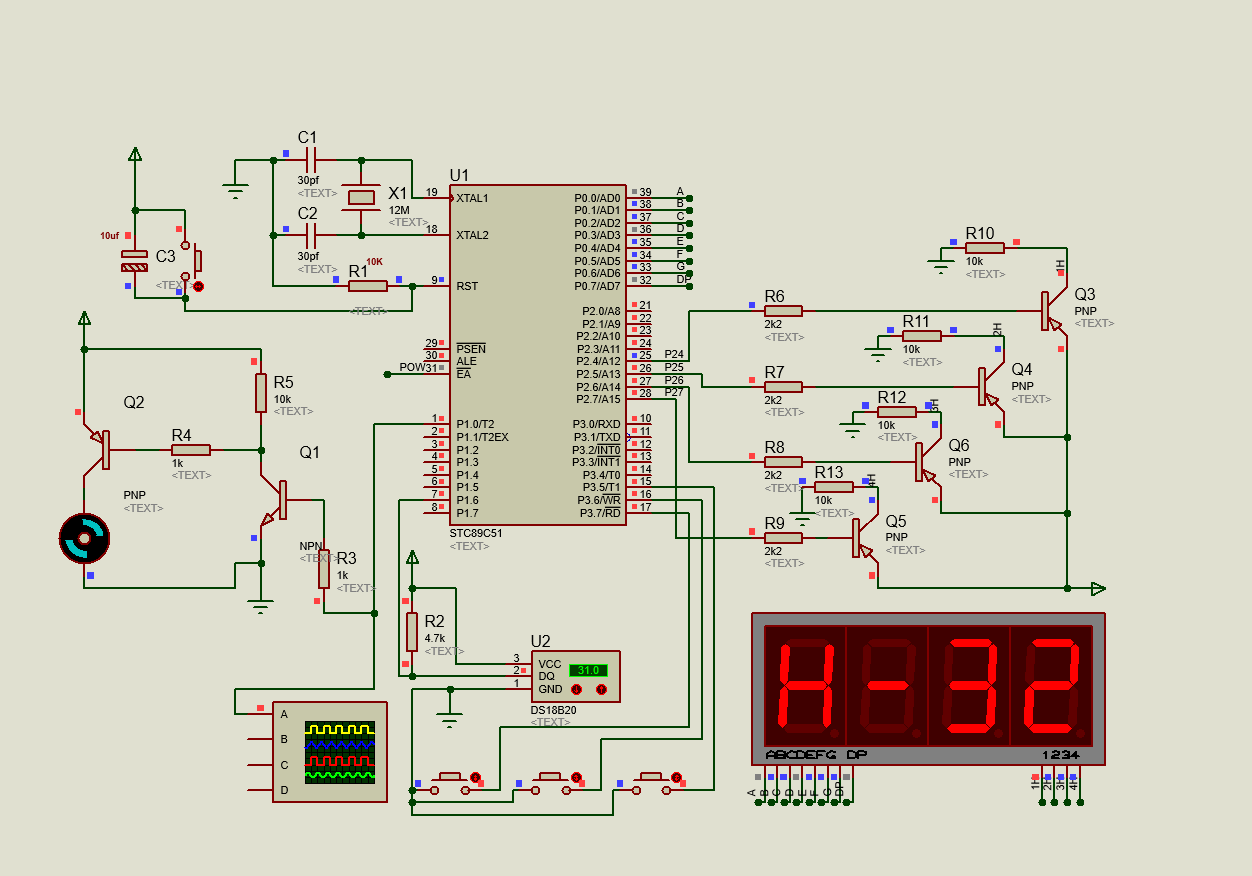
三、仿真实现
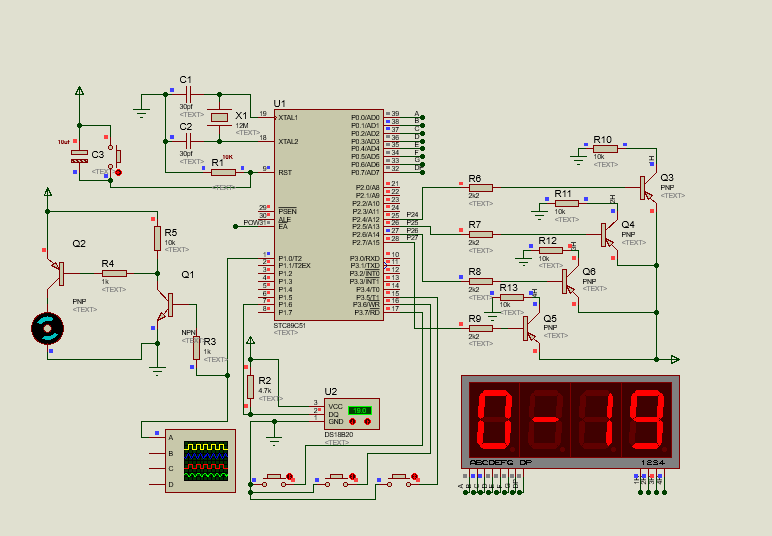
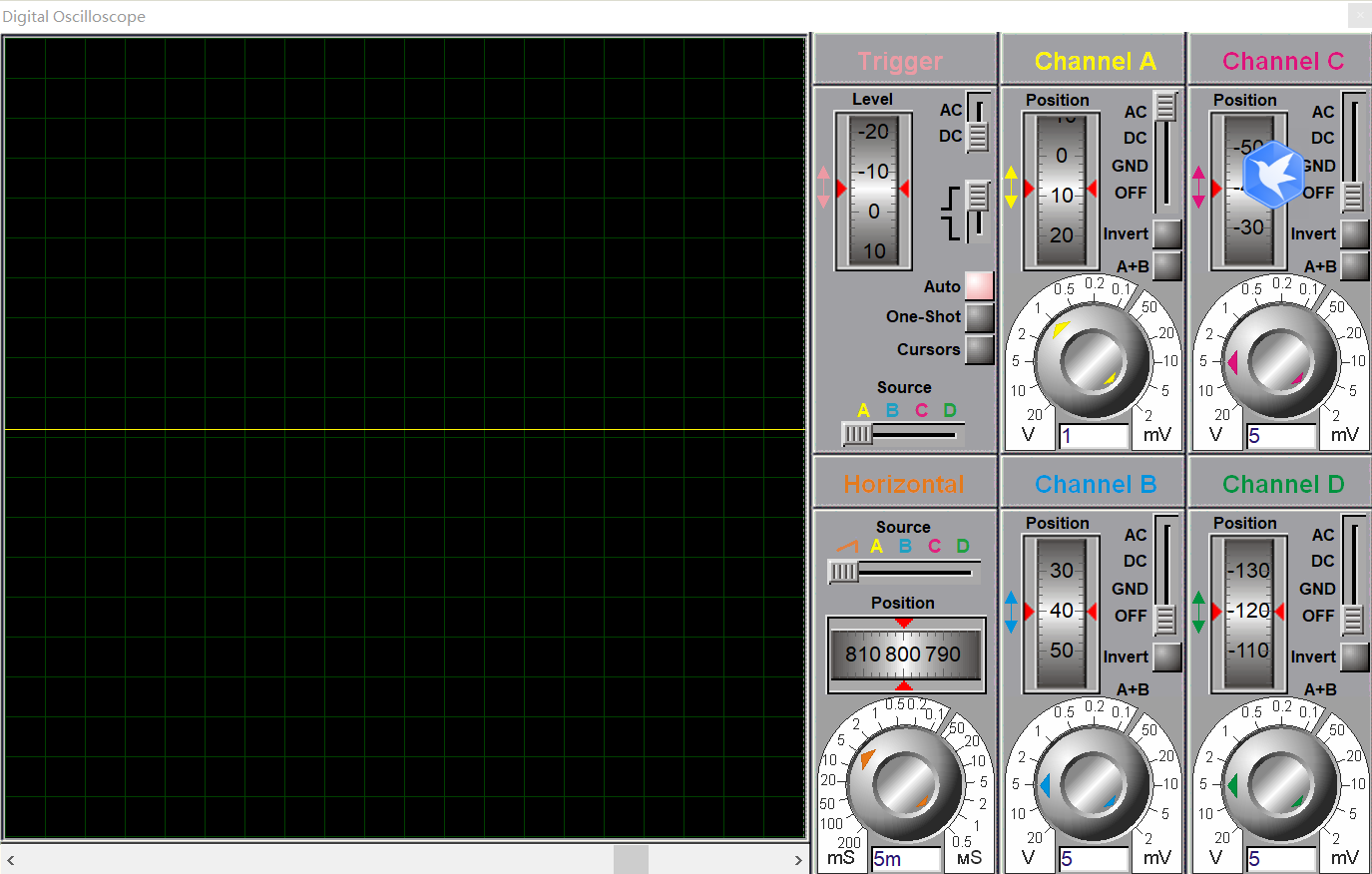
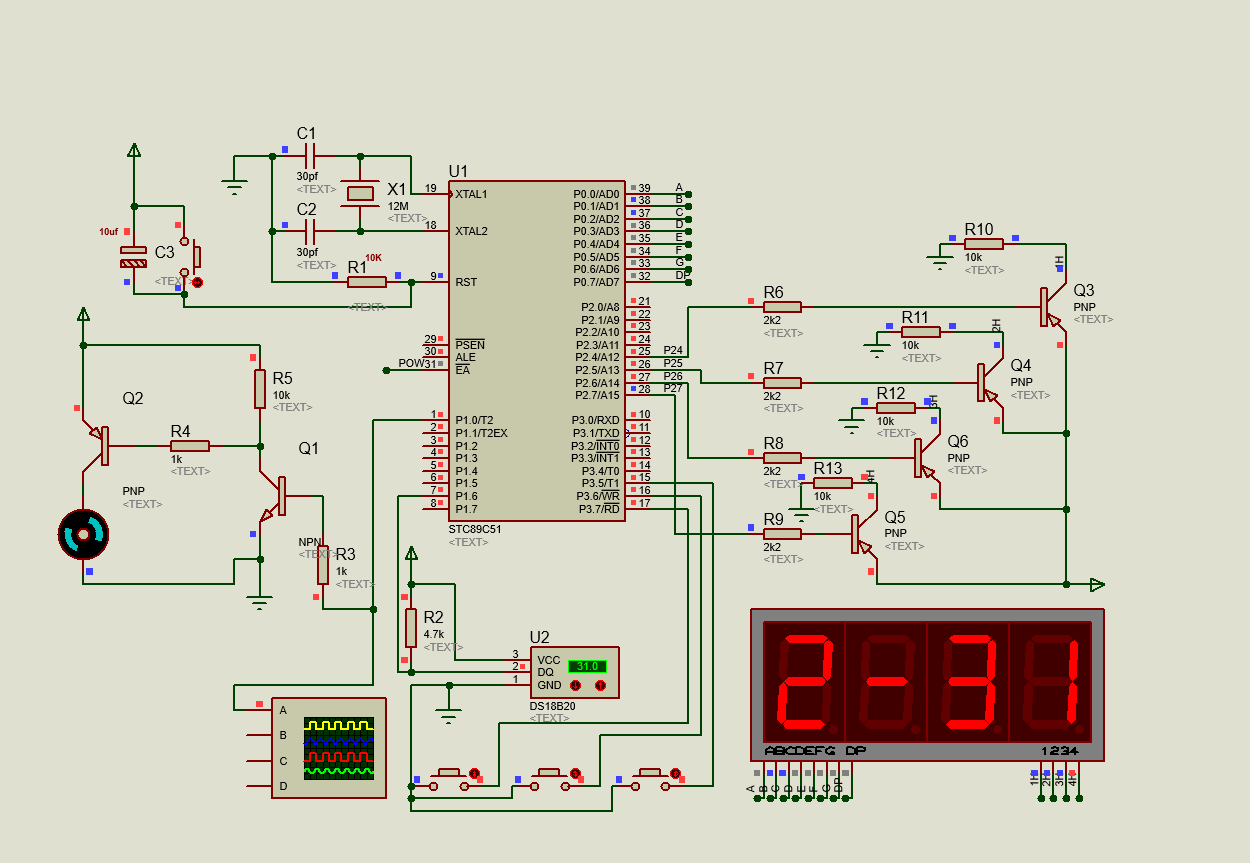
按下仿真按钮,进入温度测量界面,由于温度阈值默认为[20,30],当前测量低于20,因此风扇不转动(数码管第一位显示0),P10口的波形为低电平。
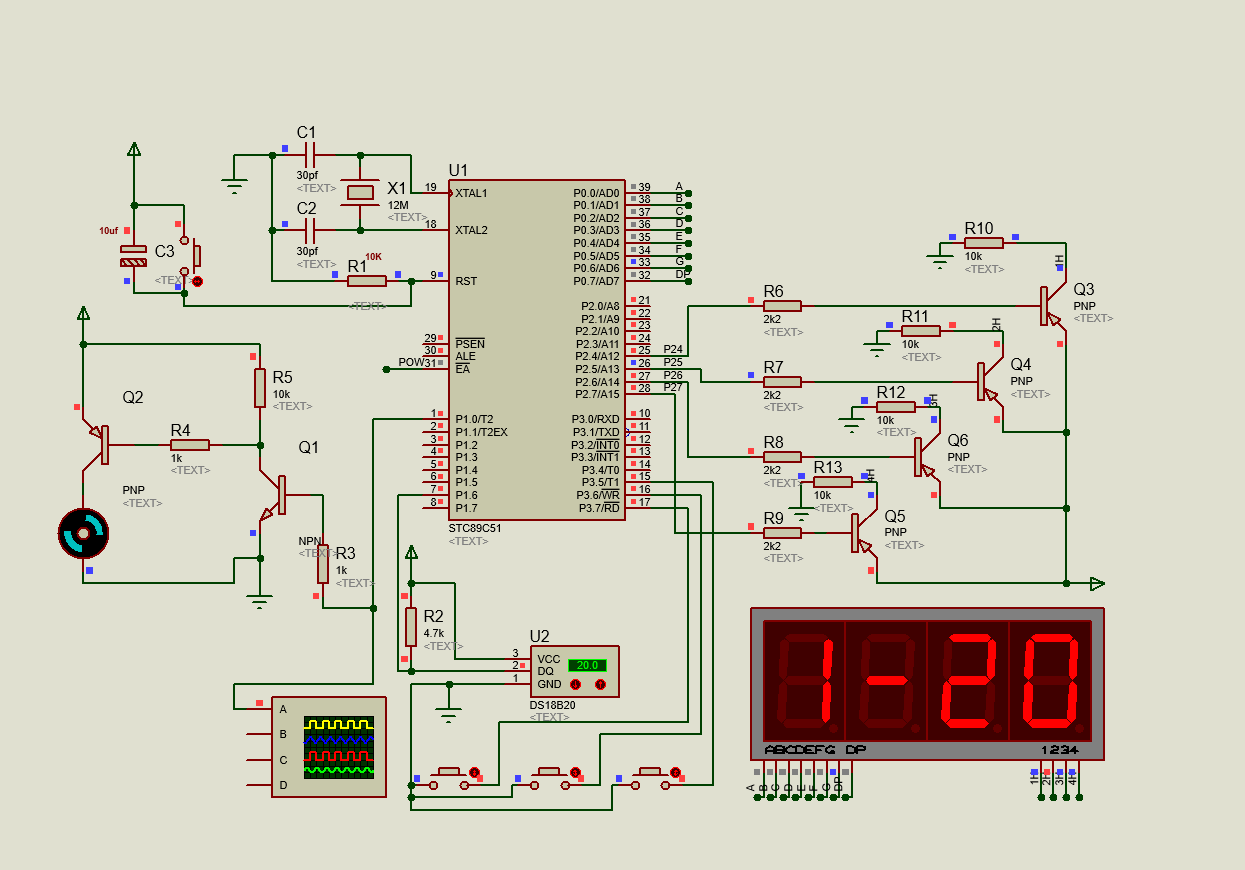
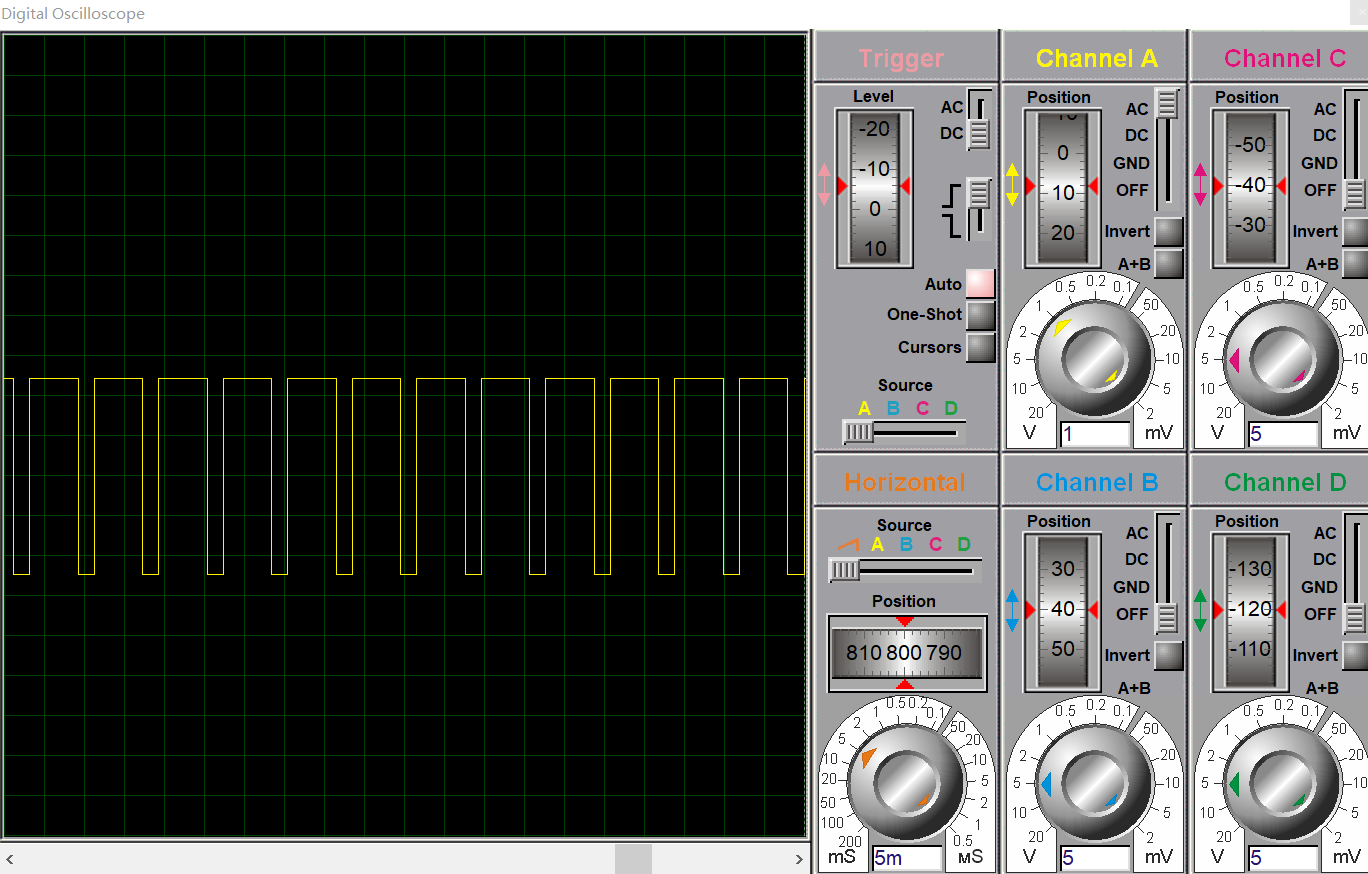
当测得温度进入[20,30]区间,风扇开始低速转动(数码管第一位显示1),P10口的波形为高频方波。
当测得温度进入超过30度,风扇开始全速转动(数码管第一位显示2),P10口的波形为高电平。
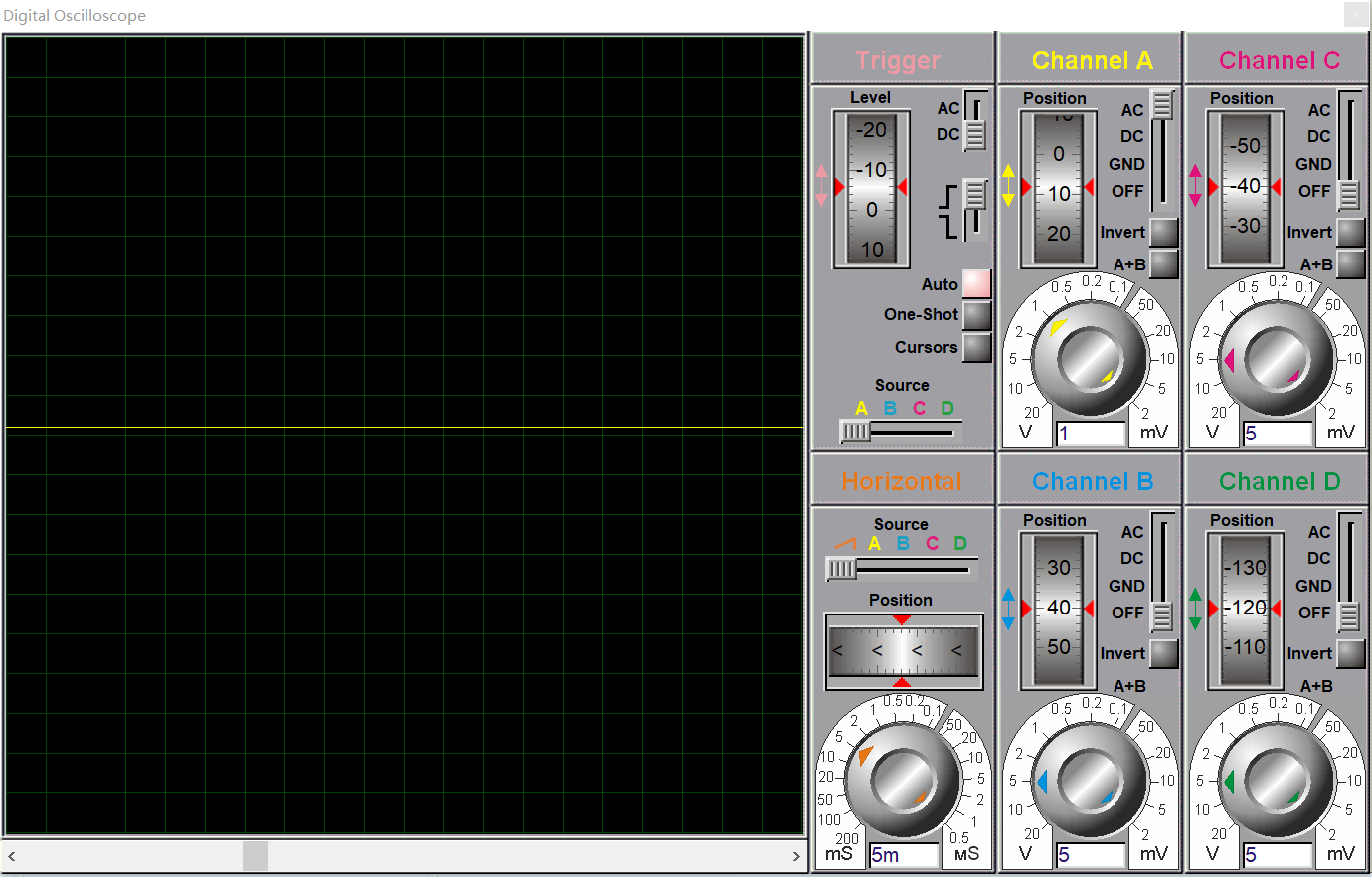
在温度测量界面下按下第三个按键,进入温度上限阈值设置界面,在此界面,可以通过第一个按键和第二个按键进行温度上限阈值加减操作。
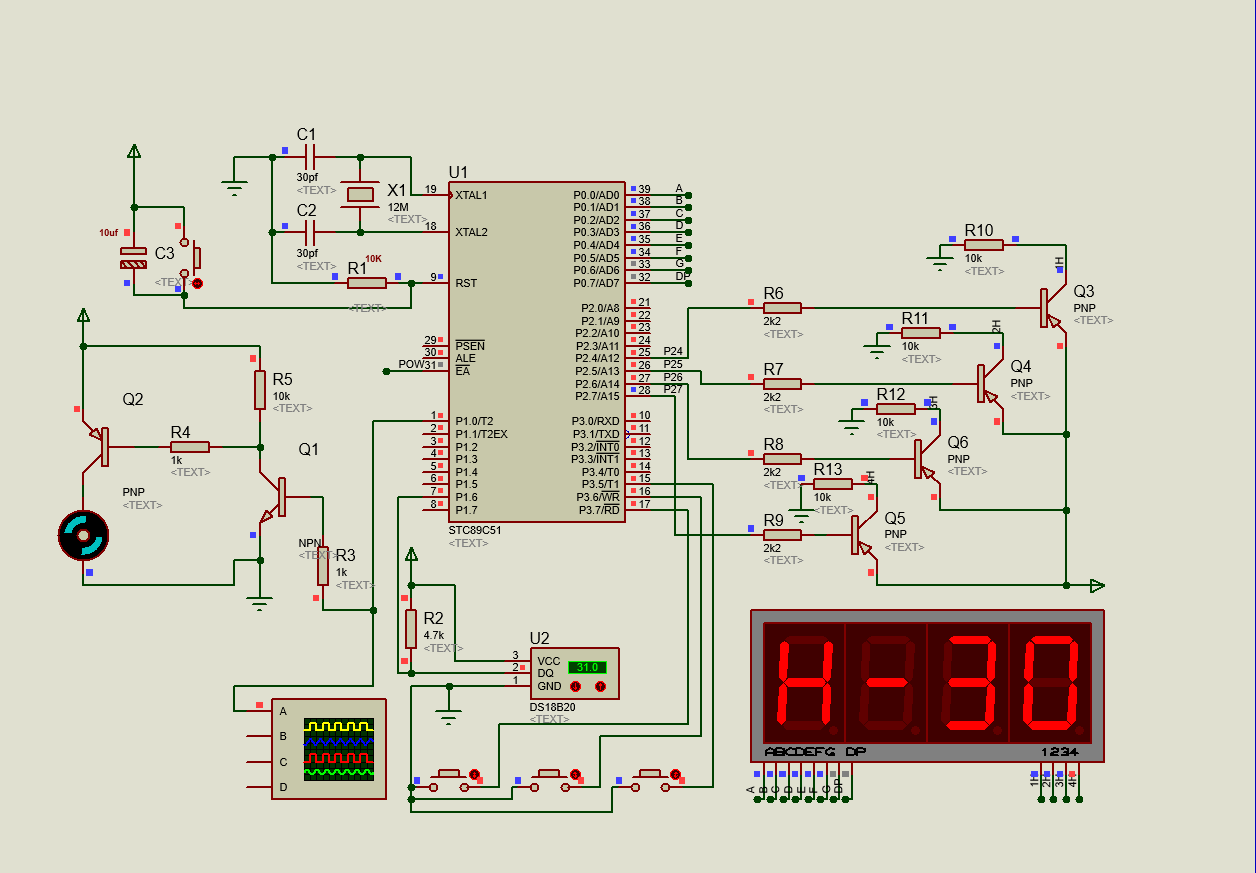
在温度上限阈值设置界面,再次按下第三个按键,可以进入温度下限阈值设置界面,通过第一个按键和第二个按键进行温度下限阈值加减操作。再次按下第三个按键,回到温度测量界面。
详细演示视频请见:基于51单片机的温控风扇Protues仿真设计-CSDN直播
四、代码实现
#include<reg51.h>
#include<intrins.h> //包含头文件
#define uchar unsigned char
#define uint unsigned int //宏定义#include "eeprom52.h"
////////////////////
sbit dj=P1^0;//电机控制端接口
sbit DQ=P1^6;//温度传感器接口
//////////按键接口/////////////////////////////////
sbit key1=P3^5;//设置温度
sbit key2=P3^6;//温度加
sbit key3=P3^7;//温度减
//////////////////////////////////////////////////////
sbit w1=P2^4;
sbit w2=P2^5;
sbit w3=P2^6;
sbit w4=P2^7; //数码管的四个位
/////共阴数码管段选//////////////////////////////////////////////
uchar table[22]=
{0x3F,0x06,0x5B,0x4F,0x66,
0x6D,0x7D,0x07,0x7F,0x6F,
0x77,0x7C,0x39,0x5E,0x79,0x71,
0x40,0x38,0x76,0x00,0xff,0x37};//'-',L,H,灭,全亮,n 16-21
uint wen_du; //温度变量
uint shang,xia; //对比温度暂存变量
uchar dang;//档位显示
uchar flag;
uchar d1,d2,d3;//显示数据暂存变量
uchar m;
uchar js;/******************把数据保存到单片机内部eeprom中******************/
void write_eeprom()
{SectorErase(0x2000); //清除扇区byte_write(0x2000, shang); //写上限数值到扇区byte_write(0x2001, xia); //写下限数值到扇区byte_write(0x2060, a_a); //写初始变量到扇区指定位置
}/******************把数据从单片机内部eeprom中读出来*****************/
void read_eeprom()
{shang = byte_read(0x2000); //从扇区读取上限数据xia = byte_read(0x2001); //从扇区读取下限数据a_a = byte_read(0x2060); //从扇区读取初始变量
}/**************开机自检eeprom初始化*****************/
void init_eeprom()
{read_eeprom(); //先读扇区的数据if(a_a != 1) //判断是否是新单片机(原理:新的单片机扇区里的数据都是0,这里判断是否不等于1。如果是不等于1,就是等于0,那就是新单片机了,就会执行下面的上下限值初始化数值的语句,并让a_a变成1,下次开机就会知道是用过的单片机了就会读取EEPROM里的上下限数据了){shang = 30; //上限数值初始为30xia = 20; //下限数值初始为20a_a = 1; //初始值变量赋值1,下次开机就会直接读取EEPROM内的上下限数据write_eeprom(); //将初始的数据保存进单片机的EEPROM}
}void delay(uint ms) //延时函数,大约延时1ms
{uchar x;for(ms;ms>0;ms--)for(x=121;x>0;x--);
}
/***********ds18b20延迟子函数(晶振12MHz )*******/
void delay_18B20(uint i)
{while(i--);
}
/**********ds18b20初始化函数**********************/
void Init_DS18B20()
{uchar x=0;DQ=1; //DQ复位delay_18B20(8); //稍做延时DQ=0; //单片机将DQ拉低delay_18B20(80); //精确延时 大于 480usDQ=1; //拉高总线delay_18B20(14);x=DQ; //稍做延时后 如果x=0则初始化成功 x=1则初始化失败delay_18B20(20);
}
/***********ds18b20读一个字节**************/
uchar ReadOneChar()
{uchar i=0;uchar dat=0;for (i=8;i>0;i--){DQ=0; // 给脉冲信号dat>>=1;DQ=1; // 给脉冲信号if(DQ)dat|=0x80;delay_18B20(4);}return(dat);
}
/*************ds18b20写一个字节****************/
void WriteOneChar(uchar dat)
{uchar i=0;for (i=8;i>0;i--){DQ=0;DQ=dat&0x01;delay_18B20(5);DQ=1;dat>>=1;}
}
/**************读取ds18b20当前温度************/
void ReadTemperature()
{uchar a=0;uchar b=0;uchar t=0;Init_DS18B20();WriteOneChar(0xCC); // 跳过读序号列号的操作WriteOneChar(0x44); // 启动温度转换delay_18B20(100); // this message is wery importantInit_DS18B20();WriteOneChar(0xCC); //跳过读序号列号的操作WriteOneChar(0xBE); //读取温度寄存器等(共可读9个寄存器) 前两个就是温度delay_18B20(100);a=ReadOneChar(); //读取温度值低位b=ReadOneChar(); //读取温度值高位wen_du=((b*256+a)>>4); //当前采集温度值除16得实际温度值
}void zi_keyscan()//自动模式按键扫描函数
{if(key1==0) //设置键按下{delay(80); //延时去抖if(key1==0){flag=1; //再次判断按键,按下的话进入设置状态while(key1==0);//松手检测 //按键释放}}while(flag==1) //进入设置上限状态{d1=18;d2=shang/10;d3=shang%10; //显示字母H 和上限温度值if(key1==0) //判断设置键是否按下{delay(80); //延时去抖if(key1==0){flag=2; //按键按下,进入设置下限模式while(key1==0);//松手检测}}if(key2==0) //加键按下{delay(80); //延时去抖if(key2==0) //加键按下{shang+=1; //上限加5if(shang>=100)shang=100; //上限最大加到100while(key2==0);//松手检测}}if(key3==0) //减键按下{delay(80); //延时去抖if(key3==0) //减键按下{shang-=1; //上限减1if(shang<=10)shang=10; //上限最小减到10if(shang<=xia)shang+=1;while(key3==0);//松手检测}} }while(flag==2) //设置下限{d1=17;d2=xia/10;d3=xia%10; //显示字母L 显示下限温度值if(key1==0){delay(80);if(key1==0){flag=0;while(key1==0);//松手检测write_eeprom(); //保存数据 }}if(key2==0){delay(80);if(key2==0){xia+=1;if(xia>=99)xia=99;if(xia>=shang)xia-=1;while(key2==0);//松手检测}}if(key3==0){delay(80);if(key3==0){xia-=1;if(xia<=0)xia=0;while(key3==0);//松手检测}} }
}void init() //定时器初始化函数
{TMOD=0x01; //定时器0工作方式1TH0=0xf8;TL0=0x30; //定时器初值5msET0=1; //打开定时器0中断允许TR0=1; //打开定时器0定时器开关EA=1; //打开中断系统总开关
}void zi_dong()//自动温控模式
{d1=dang;d2=wen_du/10;d3=wen_du%10; //显示档位,显示当前温度值zi_keyscan();//按键扫描函数if(wen_du<xia){dang=0;}//低于下限 档位为0 电机停止if((wen_du>=xia)&&(wen_du<=shang))//温度大于下限,小于上限 1挡{dang=1;}if(wen_du>shang){dang=2;}//温度大于上限,2档
}
void main() //主函数
{uchar j;dj=0; //电机开shang=30;xia=20; //初始上下限值init_eeprom(); //开始初始化保存的数据for(j=0;j<80;j++) //先读取温度值,防止开机显示85ReadTemperature();init();while(1) //进入while循环{ if(js>=200) //当js在定时器里加到50次时(js加一次是20ms,加到50次就是1000ms,也就是1秒读取一次温度){ReadTemperature(); //读取温度值js=0; //定时读取温度的变量js清零,重新计时下次读取温度} zi_dong();//判断当前需要哪一个档位}
}/*
控制占空比原理:
定时器每5ms控制变量m加一,当m加到4时,将m清零。
也就是占空比的一个周期是5ms*4=20ms,频率就是50Hz。
因为m是加四次是一个周期,也就是加一次占空比是加25%。
下面程序里if(m<=3)dj=1;else dj=0;就是让dj高电平的时间是m加3次的时间,而dj为低电平的时间就是加第四次的时间,所以占空比就是3/4就是75%
*/void T0_TIME() interrupt 1 //定时器工作函数,用于PWM工作
{TH0=0xf8;TL0=0x30; //定时器赋初值5msm++; //5ms,m加一if(js<200) js++;switch(dang) //判断档位{case 0:dj=0;break; //0档,控制电机停止case 1:if(m<=3)dj=1;else dj=0;break;//控制电机以75%占空比转动case 2:dj=1;break; //2档,控制电机100%占空比转动default:; //其他情况,直接跳出}switch(m) //判断m的数值{case 1: //m为1时w4=1;P0=~table[d1];w1=0; break; //关闭低四位数码管位选;P0口输出对应数字的段码;打开第一位数码管位选case 2:w1=1;P0=~table[16];w2=0; break; //关闭低一位数码管位选;P0口输出对应数字的段码;打开第二位数码管位选case 3:w2=1;P0=~table[d2];w3=0; break; //关闭低二位数码管位选;P0口输出对应数字的段码;打开第三位数码管位选case 4:w3=1;P0=~table[d3];w4=0;m=0;break; //关闭低三位数码管位选;P0口输出对应数字的段码;打开第四位数码管位选//js变量小于50时,就让js加,加到50后,主函数里就会执行一次读取温度函数default:; //其他情况时跳出}if(m>4) //m加到大于4时,将m清零{m=0; //m清零}
}五、总结
仿真源文件、源程序百度网盘链接:
链接: https://pan.baidu.com/s/1RWN-s6dToUMmKYuMUKL_Ag?pwd=kpbr 提取码: kpbr