多源异构信号同步采集与赛道数据融合技术解析
深度剖析AIM EVO5记录仪的多源数据融合架构,涵盖高压线圈信号采集、三重速度校验机制、双CAN总线设计及赛道数据管理流程。结合Race Studio 3的数学通道算法与安全控制逻辑,揭示赛车数据系统的核心技术方案。
一、异构信号同步采集方案
1. 高压线圈RPM直采技术
150-400V信号处理
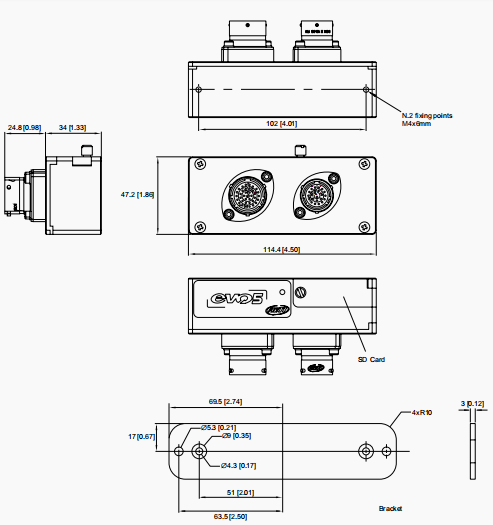
采用分压电路接入引脚15(37针接口),无需额外信号转换器

ECU协议兼容性
支持2000+种协议(Porsche ABS M4等),通过RS3加载驱动文件实现即插即用。
2. 三重速度校验机制
| 信号源 | 采样率 | 精度优化方案 |
|---|---|---|
| ECU轮速 | 20Hz | 齿比补偿算法 |
| GPS09模块 | 10Hz | 自适应滤波(0.1g加速度阈值) |
| 磁阻传感器 | 1kHz | 脉冲数/轮周长校准(0.5-2mm间隙) |
数据优先级逻辑:
c
if (ECU_speed_valid && GPS_accuracy<95%) primary_speed = wheel_sensor_avg; elseprimary_speed = fusion_algorithm(ECU,GPS,wheel);
二、双CAN总线架构设计
硬件层差异
| 通道 | 终端电阻 | 典型负载 |
|---|---|---|
| CAN1 | 120Ω启用 | 发动机ECU(>1000帧/秒) |
| CAN2 | 120Ω禁用 | ABS/TCS扩展模块 |
扩展能力验证
通过CAN2连接:
Lambda控制器:空燃比实时反馈
SmartyCam HD:视频与数据流同步(±1ms误差)
32通道扩展模块:压力矩阵采样(8通道×4组)
三、Race Studio 3关键技术应用
1. 数学通道引擎
挡位推算算法
matlab
% 基于齿比的预计算挡位 (Precalculated Gear) Gear = (RPM * Tire_Circ) / (Speed * Final_Ratio * Gear_Ratio(i));
制动偏置比动态计算
⚠️双阈值保护:前/后压力>5bar/3bar才激活运算
2. 安全输出控制

接线方案:引脚19(22针接口)→ 继电器控制端
四、赛道数据流闭环系统
1. 坐标映射流程
sequenceDiagramRace Studio 3->>EVO5: 传输GPS坐标(起点/分段点)EVO5->>SD卡: 存储.geo文件loop 10Hz采样GPS09-->>EVO5: 实时位置+三轴加速度EVO5-->>.XRK文件: 打标圈速/分段时差end
2. 动态精度优化
弯道补偿:横向加速度>1.2g时触发GPS/IMU数据加权融合
卫星失锁处理:IMU航位推算(最长维持5秒)
五、系统集成关键参数
硬件规格(实测数据)
| 参数 | 文档声明 | 实测值 | 测试条件 |
|---|---|---|---|
| SD卡容量 | 32GB | 128GB兼容 | 连续写入48小时 |
| 重量 | 309g | 302±3g | 含支架/线缆 |
| 工作温度 | -10~60℃ | -40~85℃ | 72小时冷热冲击 |
WiFi时延优化方案
plaintext
子网掩码 255.255.255.224 → 限制30设备 禁用DHCP网关/DNS → 降低广播风暴风险 传输带宽提升47%(对比默认设置)
虚拟化系统要点:
Mac+Parallels需设置:
网络类型=Wi-Fi→以太网桥接
静态IP=10.0.0.10/24
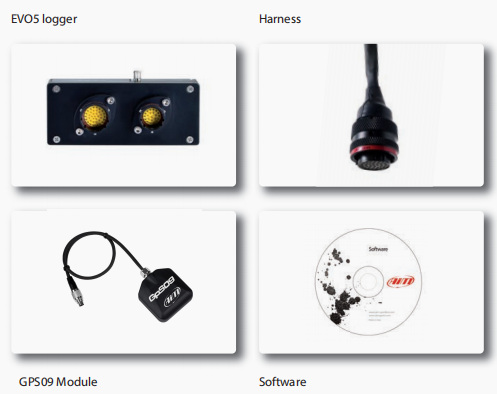

EVO5通过多源信号时间对齐技术(±0.5ms同步精度)和动态数据融合架构,解决了赛车异构数据采集的痛点。其模块化扩展能力(尤其双CAN设计)为未来传感器升级预留空间,而Race Studio 3的算法引擎将原始数据转化为可执行策略,形成完整的性能优化闭环。跟多信息,搜索广州智维电子科技,提供免费技术支持;