自动驾驶中的传感器技术20——Camera(11)
1、自动驾驶摄像头的标定如何影响自动驾驶特性
对摄像头进行正确校准对于自动驾驶功能的准确性和可靠性至关重要。校准涉及调整摄像头,以确保其能够准确捕捉和处理来自车辆环境的视觉数据。这种精确度对于车道保持辅助、碰撞检测和自适应巡航控制等功能至关重要。若未进行适当的校准,车辆做出明智决策的能力可能会受到影响。
例如,车道保持系统依靠摄像头来监控道路标线,并使车辆保持在车道中央。如果摄像头校准不当,可能会对这些标线产生误判,从而引发潜在的安全隐患。
其中一个重要领域是自适应巡航控制,它需要精确测量车辆之间的距离。经过校准的摄像头可确保这些测量准确无误,从而实现平稳且安全的速度调整。
此外,自动停车系统高度依赖摄像头输入来测量距离和识别停车位。摄像头校准不当会导致评估错误,使停车操作变得不可靠,甚至可能存在安全隐患。
此外,碰撞检测系统依赖于准确的视觉数据来识别障碍物和行人。如果摄像头没有正确校准,它可能会无法识别或错误检测物体,从而增加事故风险。因此,为了保持最佳性能,必须进行常规检查和校准。
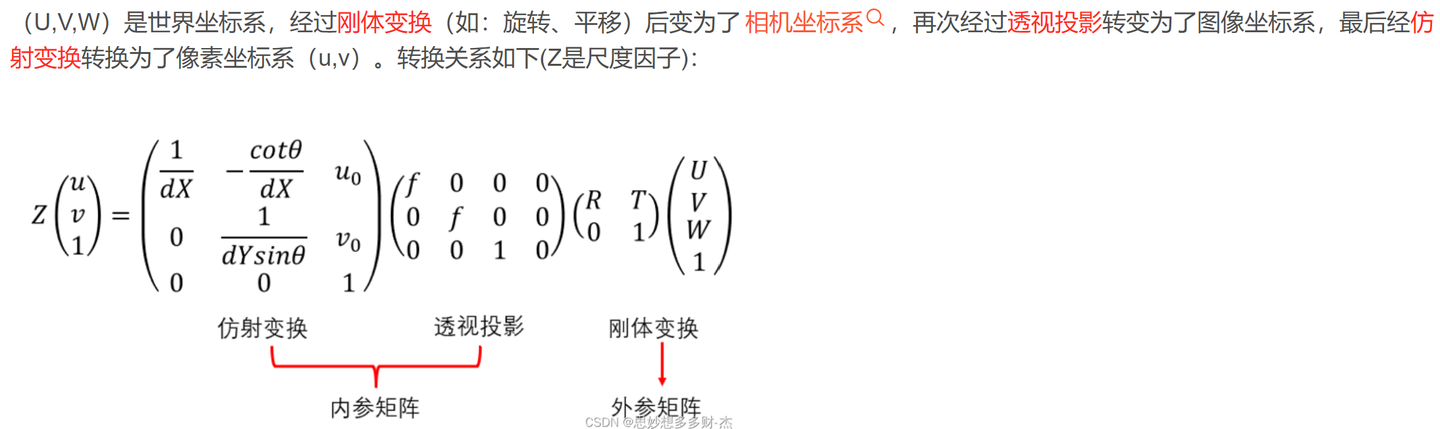
2、内参标定(只与相机本身有关,取决于相机内部参数)
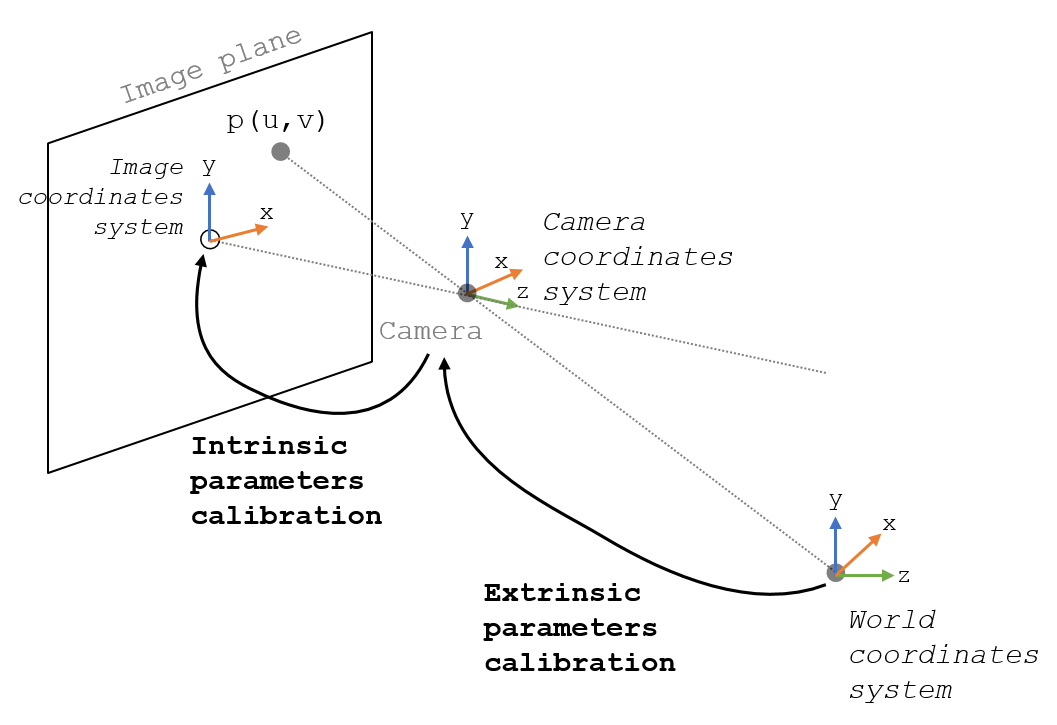
为了将相机坐标映射到像素坐标(以便在真实世界中映射虚拟物体),我们需要找到相机的内在参数。下图展示了相机校准中涉及的元素。
内参包括:
-
比例因子(通常等于1)
-
焦距(投影中心与像平面之间的距离)
-
主点(假设图像中心为像素0,0)
-
偏斜(当主点并不完全位于像平面中心时)
-
几何畸变(由镜头引起)
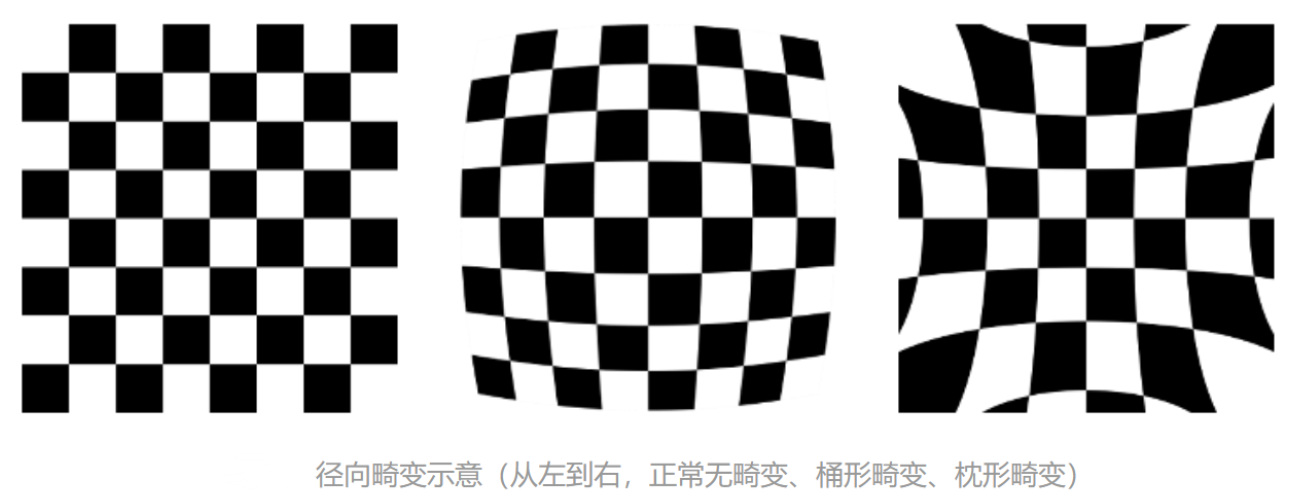
相机内参主要有5个:焦距、像素主点坐标、畸变参数
以下图针孔模型为例
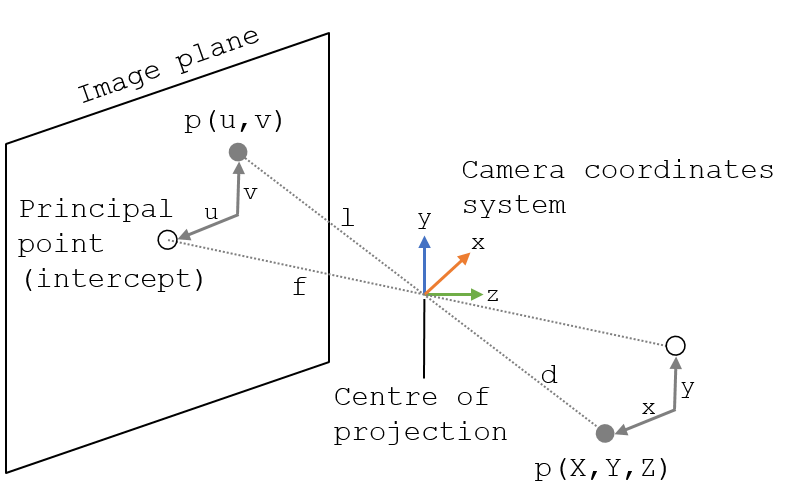
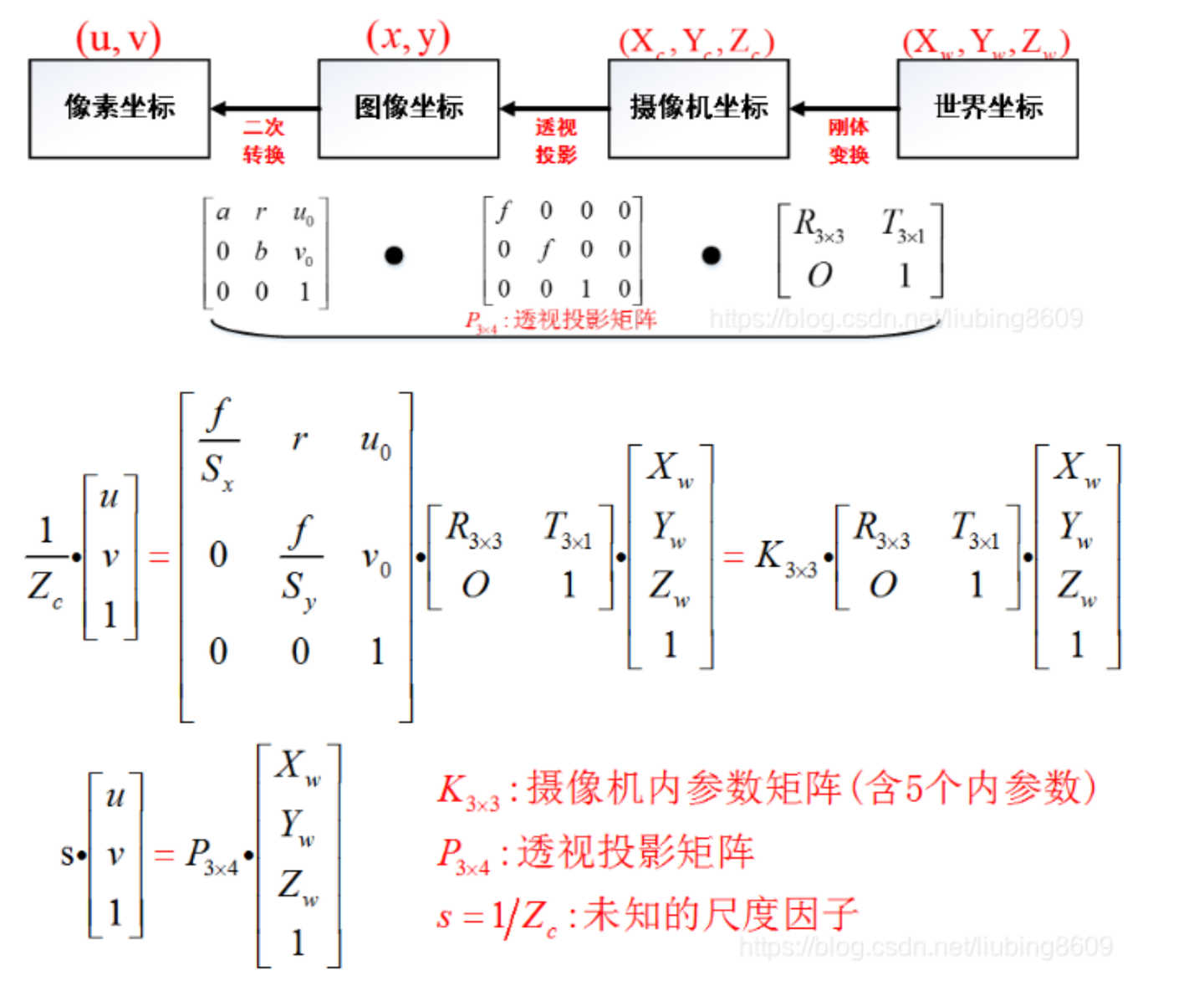
要将二维点 (u,v) 映射到三维点 (X,Y,Z),需要解以下方程:
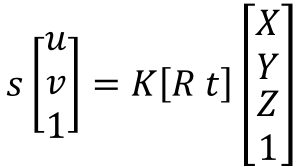
其中s为缩放因子,[R t]为相机的外部参数(R为相机相对于世界坐标系的旋转,t为平移),K对应相机的内部参数,其定义如下:
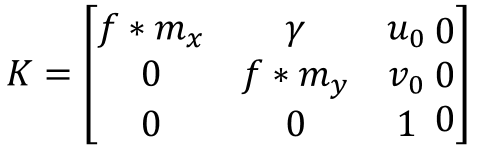
其中,f表示焦距,m表示x和y的缩放因子(通常为1),(u,v)表示主点。
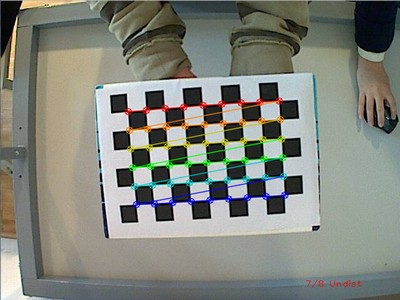
解决这个方程的一般思路是,从不同位置拍摄特定图案(如棋盘)的几张照片,并从照片中提取特征(如角或点)。然后,通过解方程来找到相机参数。
3、外参标定
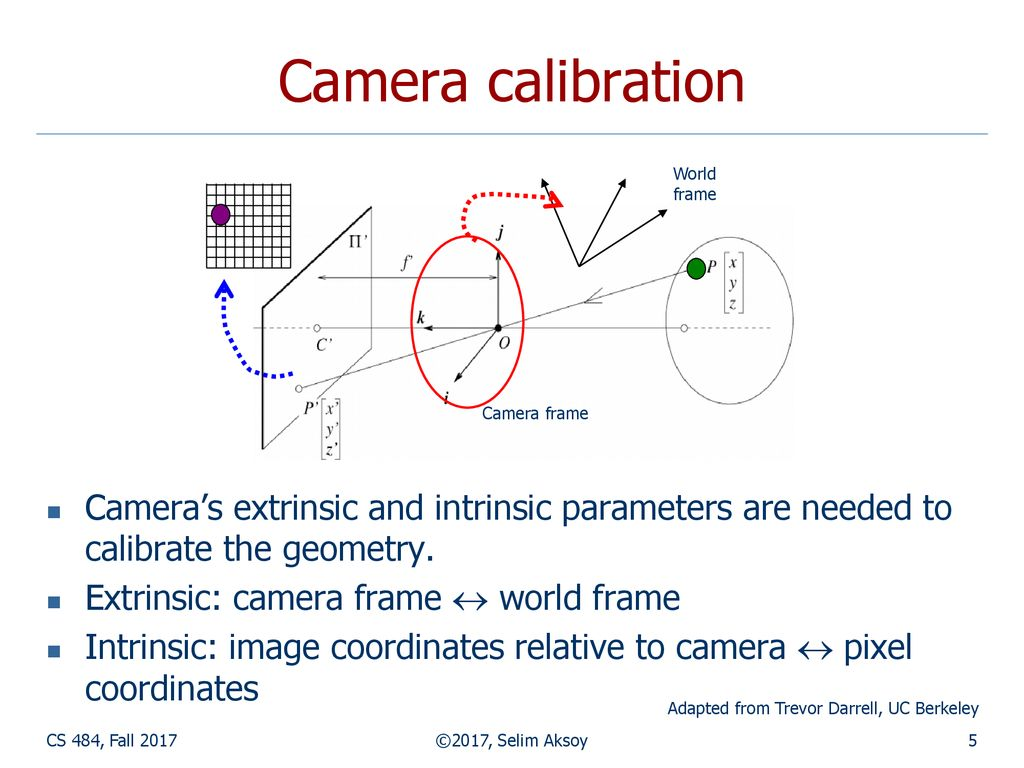


相机外参参数有6个:旋转和平移
校准过程通常由专业人员使用专业工具和软件进行。以下是校准过程中常见的步骤:
评估:评估摄像头当前的对准状态和功能状态。
调整:使用校准目标和软件来精确地对齐摄像头。
验证:对系统进行测试,以确保所有ADAS功能均能正确响应。
相机标定步骤:
1、打印一张棋盘格,把它贴在一个平面上,作为标定物;
2、通过调整标定物或者摄像头的方向,为标定物拍摄一些不同方向的照片;
3、从照片中提取棋盘格角点;
4、估算理想无畸变的情况下,5个内参和六个外参;
5、应用最小二乘法估算实际存在的径向畸变下的畸变系数;
6、极大似然法,优化估计,提升估计精度。
Ref:计算机视觉(相机标定;内参;外参;畸变系数)-CSDN博客