野生动物巡查系统(H题)--2025 年全国大学生电子设计竞赛试题
目录
一、任务
二、要求
1.基本要求
2.发挥部分
三、说明
1.巡查区域说明
2.人机要求
3.测试要求与说明
四、评分标准
一、任务
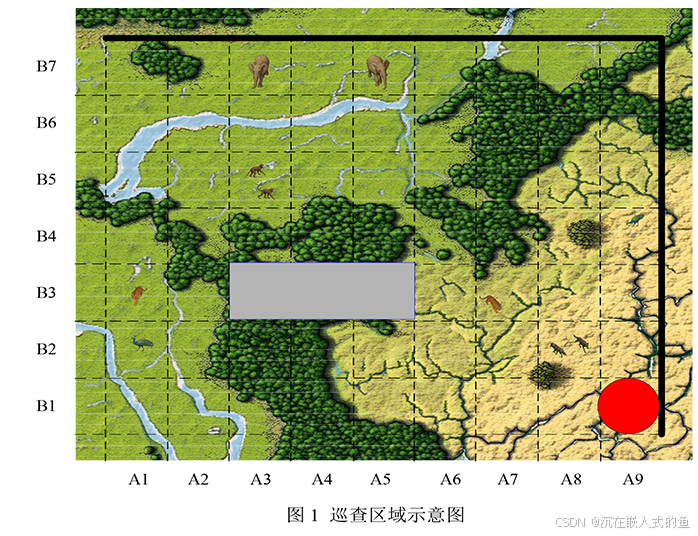
用多旋翼自主飞行无人机巡查450cm×350cm区域(分成63个50cm×50cm方格),识别、统计区域内野生动物类型(如象、虎、狼、狼、狼、猴、孔雀等)、所在位置及各种动物的数量。巡查时不得飞越灰色矩形禁飞区,禁飞区由数个连续方格组成,在测试时现场给出这些方格的代码,见图1。巡查系统由无人机及地面站构成,地面站需包含但不限于微控制器、不小于6吋的显示屏、按键输入设备:但不允许使用通用键盘和PC机。无人机下方安装激光笔,巡查时激光笔垂直向下指示航线。
二、要求
1.基本要求
(1)巡查前根据现场指定的禁飞区方格代码,在地面站用按键设置禁飞区。要求在显示屏按9×7方格画出巡查航线,航线需覆盖禁飞区以外所有方格。
(2)无人机从红色起飞区域起飞,在120±10cm高度按规划的航线巡查,飞行时不得偏离航线:巡查完成时间不得超过300s,越快越好。
(3)巡查发现某方格中有野生动物时,识别动物种类及数量:将方格代码、动物名称及数量发送到地面站实时显示并保存,要求事后能调出显示
(4)无人机完成巡查后,在地面站显示所发现动物的名称及每种动物数量。
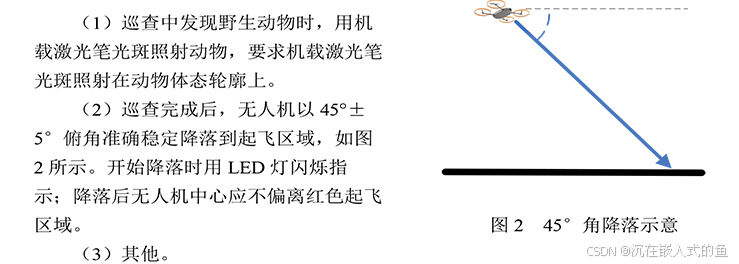
2.发挥部分
三、说明
1.巡查区域说明
- 参赛队在赛区提供的场地测试,参赛队不得擅自改变测测试环境条件。根据赛题附件中地貌图制作500cm×400cm尺寸的哑光喷绘布地面。喷绘前做如下设计:在原始地图基础上,四周各空出25cm空间,形成450cm×350cm的巡查区域;图上绘制横竖间距50cm、线宽0.05cm的灰色虚线,将巡查区域划分成63个方格,横向为A1~A9,纵向为B1~B7,方格以代码AnBm(如A3B5)命名。
- (3)图1所示,禁飞区为三个连续方格构成的灰色(R-180、G-180、B-180)矩形,根据测试时给出方格代码,将灰色喷绘布粘贴不在地图指定位置。
- (4)动物体态图选自于赛题附图,共有五种动物,各有多种形状;根据动物体型差异大致以(象:虎:狼:猴:孔雀=2:1:1:1:1)的比例,象的长度为30cm,印制动物图片,沿动物外廓线剪去空白,背面粘贴双面面胶粘贴到地图上。
- (5)无人机巡查时,机载激光笔光斑扫到方格内,即即视为巡查覆盖了该区域;若机载激光笔扫过的轨迹与规划的航线不一致,则判定为偏离航线;偏离航线或漏查方格将扣分。
- (6)巡查区上方长边、右侧短边各有一条1.8cm宽黑色标志线,可用于无人机辅助定位;也可采用其他方法定位,但无人机以外不不得有其他摄像头。
- (7)500cm×400cm地图四周及顶部设置安全网,支架在安全网外。若有辅助定位装置,须在地图区域及其上方空间之外。
- (8)测试现场避免阳光直射,但不排除顶部照明灯及窗外环境光照射,参赛队应考虑到测试现场会受到外界光照或室内照明不均等影响因素;测试时不得提出光照条件要求。参赛队应该考虑到巡查区地地图存在色彩差异。
2.人机要求
- 参赛队使用无人机时应遵守中国民用航空局的相关关管理规定。
- (2)无人机最大轴间距不大于45cm。
- (3)无人机桨叶必须全防护,否则不予测试。
3.测试要求与说明
- (1)调试及测试时参赛队员必须佩戴防护眼镜,戴防护手套,穿长袖长裤
- (2)测试地图由赛区统一喷绘铺设:测试时禁飞区的位置现场抽签决定;被测动物图片在赛题附图中选择,尺寸大小符合说明1(4)项的规定,由赛区统一印刷提供。
- (3)测试前抽签决定动物图片及所在位置,参赛队员将给定动物图片粘贴在指定方格内,图片方向可由参赛队员决定。
- (4)机载激光笔照射在地面的光斑直径不得大于1cm;巡查时激光笔必须垂直向下。
- (5)巡查时,无人机载激光笔光斑轨迹需与规划航线相同;偏离或遗漏将扣分。
- (6)基本要求与发挥部分一次完成;起飞后中途停止,,已完成部分成绩有效。可以测试两次,取综合成绩高的一次。
- (7)起飞前,无人机可手动放置到起飞区域;手动一键启动起飞,起飞后整个飞行过程中不得人为干预;若采用无人机以外的启动动或急停装置,一键启动起飞操作后必须立刻将装置交给评审人员。
- (8)每次测试全过程中不得更换电池:两次测试之间允许更换电池,更换电
- 池时间不大于2分钟。
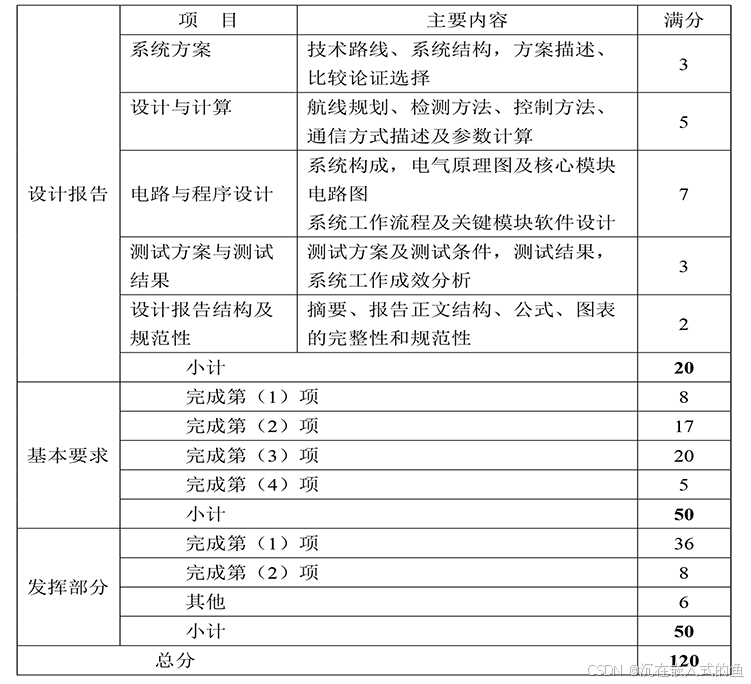
四、评分标准