数值计算 | 图解基于龙格库塔法的微分方程计算与连续系统离散化(附Python实现)
目录
- 0 专栏介绍
- 1 连续系统离散化
- 2 欧拉法
- 3 双线性变换
- 4 龙格库塔法
- 5 Python实验
0 专栏介绍
🔥课设、毕设、创新竞赛必备!🔥本专栏涉及更高阶的运动规划算法轨迹优化实战,包括:曲线生成、碰撞检测、安全走廊、优化建模(QP、SQP、NMPC、iLQR等)、轨迹优化(梯度法、曲线法等),每个算法都包含代码实现加深理解
🚀详情:运动规划实战进阶:轨迹优化篇
1 连续系统离散化
定义在时域的连续时间系统方程为
{x˙(t)=Ax(t)+Bu(t)y(t)=Cx(t)+Du(t)\begin{cases} \dot{\boldsymbol{x}}(t) = \boldsymbol{A}\boldsymbol{x}(t) + \boldsymbol{B}\boldsymbol{u}(t) \\ \boldsymbol{y}(t) = \boldsymbol{C}\boldsymbol{x}(t) + \boldsymbol{D}\boldsymbol{u}(t) \end{cases} {x˙(t)=Ax(t)+Bu(t)y(t)=Cx(t)+Du(t)
经过zzz变换后可得zzz 域系统方程及传递函数:
{zX(z)=AdX(z)+BdU(z)Y(z)=CdX(z)+DdU(z)⟹G(z)=Cd(zI−Ad)−1Bd+Dd\begin{cases} z\boldsymbol{X}(z) = \boldsymbol{A}_d\boldsymbol{X}(z) + \boldsymbol{B}_d\boldsymbol{U}(z) \\ \boldsymbol{Y}(z) = \boldsymbol{C}_d\boldsymbol{X}(z) + \boldsymbol{D}_d\boldsymbol{U}(z) \end{cases} \implies G(z) = \boldsymbol{C}_d(z\boldsymbol{I} - \boldsymbol{A}_d)^{-1}\boldsymbol{B}_d + \boldsymbol{D}_d {zX(z)=AdX(z)+BdU(z)Y(z)=CdX(z)+DdU(z)⟹G(z)=Cd(zI−Ad)−1Bd+Dd
连续系统离散化的核心在于用差分方法估计连续系统的微分量 x˙(t)\dot{\boldsymbol{x}}(t)x˙(t),并建立离散状态矩阵与连续矩阵的关系。不妨将对微分x˙(t)\dot{\boldsymbol{x}}(t)x˙(t)的估计问题转变为对积分
x(t)=∫x˙(t)\boldsymbol{x}(t) = \int \dot{\boldsymbol{x}}(t) x(t)=∫x˙(t)
的估计问题,x(t)\boldsymbol{x}(t)x(t)的物理意义是从初始时刻到ttt时刻x˙(t)\dot{\boldsymbol{x}}(t)x˙(t)的积分值——x˙(t)\dot{\boldsymbol{x}}(t)x˙(t)曲线下方的面积。接下来,基于上述概念推导常用的连续系统离散化方法。
2 欧拉法
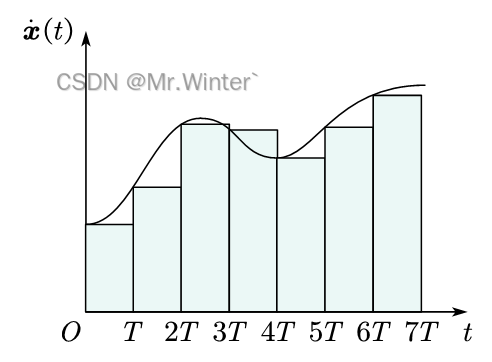
如图所示,采用左端点矩形近似x(t)\boldsymbol{x}(t)x(t),则x(kT+T)=x(kT)+x˙(kT)⋅T\boldsymbol{x}(kT + T) = \boldsymbol{x}(kT) + \dot{\boldsymbol{x}}(kT) \cdot Tx(kT+T)=x(kT)+x˙(kT)⋅T,对方程两边应用zzz变换和Laplace变换有:
zX(z)=X(z)+sTX(s)z\boldsymbol{X}(z) = \boldsymbol{X}(z) + sT\boldsymbol{X}(s)zX(z)=X(z)+sTX(s)
令X(s)=X(z)X(s) = X(z)X(s)=X(z)(即频域映射关系),即得欧拉法的映射:
s=z−1Ts = \frac{z - 1}{T}s=Tz−1
将该式代入连续系统方程,使连续系统映射到离散系统:
Gd(z)=C(z−1TI−A)−1B+D⇒Gd(z)=C(zI−(I+TA))−1BT+D\boldsymbol{G}_d(z) = \boldsymbol{C}\left( \frac{z - 1}{T} \boldsymbol{I} - \boldsymbol{A} \right)^{-1} \boldsymbol{B} + \boldsymbol{D} \Rightarrow \boldsymbol{G}_d(z) = \boldsymbol{C}(z \boldsymbol{I} - (\boldsymbol{I} + T \boldsymbol{A}))^{-1} \boldsymbol{B} T + \boldsymbol{D}Gd(z)=C(Tz−1I−A)−1B+D⇒Gd(z)=C(zI−(I+TA))−1BT+D
对比离散系统标准形式,即得欧拉法离散化公式:
Ad=I+TA,Bd=BT,Cd=C,Dd=D\boldsymbol{A}_d = \boldsymbol{I} + T \boldsymbol{A}, \quad \boldsymbol{B}_d = B T, \quad \boldsymbol{C}_d = \boldsymbol{C}, \quad \boldsymbol{D}_d = \boldsymbol{D}Ad=I+TA,Bd=BT,Cd=C,Dd=D
以及离散化差分方程:
x(k+1)=(I+TA)x(k)+BTu(k)y(k)=Cx(k)+Du(k)\begin{matrix} \boldsymbol{x}(k+1) = (\boldsymbol{I} + T \boldsymbol{A}) \boldsymbol{x}(k) + B T \boldsymbol{u}(k) \\ \boldsymbol{y}(k) = \boldsymbol{C} \boldsymbol{x}(k) + D \boldsymbol{u}(k) \end{matrix} x(k+1)=(I+TA)x(k)+BTu(k)y(k)=Cx(k)+Du(k)
根据泰勒展开:
x(t+T)=x(t)+Tx˙(t)+12T2x¨(t)+⋯\boldsymbol{x}(t+T) = \boldsymbol{x}(t) + T \dot{\boldsymbol{x}}(t) + \frac{1}{2} T^2 \ddot{\boldsymbol{x}}(t) + \cdotsx(t+T)=x(t)+Tx˙(t)+21T2x¨(t)+⋯
可知,欧拉法近似误差为采样周期的一阶精度:
x(t+T)−x(t)T−x˙(t)≈12Tx¨(t)=O(T)\frac{\boldsymbol{x}(t+T) - \boldsymbol{x}(t)}{T} - \dot{\boldsymbol{x}}(t) \approx \frac{1}{2} T \ddot{\boldsymbol{x}}(t) = O(T)Tx(t+T)−x(t)−x˙(t)≈21Tx¨(t)=O(T)
3 双线性变换
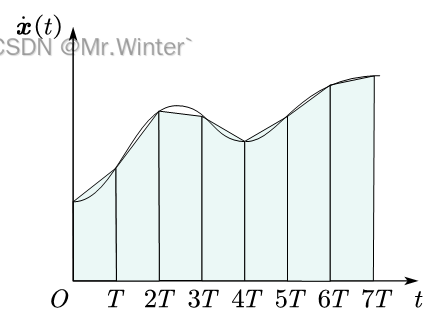
如图所示, 采用梯形近似x(t)\boldsymbol{x}(t)x(t), 则
x(kT+T)=x(kT)+T2(x^(kT)+x(kT+T))\boldsymbol{x}(k T+T)=\boldsymbol{x}(k T)+\frac{T}{2}(\hat{\boldsymbol{x}}(k T)+\boldsymbol{x}(k T+T))x(kT+T)=x(kT)+2T(x^(kT)+x(kT+T))
对方程两边应用zzz变换和Laplace 变换有
2zX(z)=2X(z)+T(sX(s)+szX(s))2 z \boldsymbol{X}(z)=2 \boldsymbol{X}(z)+T(s \boldsymbol{X}(s)+s z \boldsymbol{X}(s))2zX(z)=2X(z)+T(sX(s)+szX(s))
令X(s)=X(z)\boldsymbol{X}(s)=\boldsymbol{X}(z)X(s)=X(z)即得双线性变换映射
s=2(z−1)T(z+1)s=\frac{2(z-1)}{T(z+1)}s=T(z+1)2(z−1)
将该式代入 (8.2) 使连续系统映射到离散系统
Gd(z)=C(zI−(I−12TA)−1(I+12TA))−112(I−12TA)−1BT(z+1)+D\boldsymbol{G}_{d}(z)=\boldsymbol{C}\left(z \boldsymbol{I}-\left(\boldsymbol{I}-\frac{1}{2} T \boldsymbol{A}\right)^{-1}\left(\boldsymbol{I}+\frac{1}{2} T \boldsymbol{A}\right)\right)^{-1} \frac{1}{2}\left(\boldsymbol{I}-\frac{1}{2} T \boldsymbol{A}\right)^{-1} \boldsymbol{B} T(z+1)+\boldsymbol{D}Gd(z)=C(zI−(I−21TA)−1(I+21TA))−121(I−21TA)−1BT(z+1)+D
进一步得到
Ad=(I−12TA)−1(I+12TA)Bd=12(I−12TA)−1BTCd=C(I+(I−T2A)−1(I+T2A))Dd=D+CBT2(I−T2A)−1A_{d}=\left(I - \frac{1}{2}TA\right)^{-1}\left(I + \frac{1}{2}TA\right) \\ B_{d}=\frac{1}{2}\left(I - \frac{1}{2}TA\right)^{-1}BT \\ C_{d}=C\left(I+\left(I - \frac{T}{2}A\right)^{-1}\left(I + \frac{T}{2}A\right)\right) \\ D_{d}=D+\frac{CBT}{2}\left(I - \frac{T}{2}A\right)^{-1}Ad=(I−21TA)−1(I+21TA)Bd=21(I−21TA)−1BTCd=C(I+(I−2TA)−1(I+2TA))Dd=D+2CBT(I−2TA)−1
和离散化差分方程组
{x(k+1)=(I−T2A)−1(I+T2A)x(k)+BT2(I−T2A)−1u(k)y(k)=C(I+(I−T2A)−1(I+T2A))x(k)+(D+CBT2(I−T2A)−1)u(k)\begin{cases} x(k + 1)=\left(I - \frac{T}{2}A\right)^{-1}\left(I + \frac{T}{2}A\right)x(k)+\frac{BT}{2}\left(I - \frac{T}{2}A\right)^{-1}u(k)\\ y(k)=C\left(I+\left(I - \frac{T}{2}A\right)^{-1}\left(I + \frac{T}{2}A\right)\right)x(k)+\left(D+\frac{CBT}{2}\left(I - \frac{T}{2}A\right)^{-1}\right)u(k) \end{cases}{x(k+1)=(I−2TA)−1(I+2TA)x(k)+2BT(I−2TA)−1u(k)y(k)=C(I+(I−2TA)−1(I+2TA))x(k)+(D+2CBT(I−2TA)−1)u(k)
基于泰勒展开的公式:
x(t+T)−x(t)T=x˙(t)+12Tx¨(t)+16T2x¨(t)+⋯\frac{\boldsymbol{x}(t + T)-\boldsymbol{x}(t)}{T}=\dot{\boldsymbol{x}}(t)+\frac{1}{2}T\ddot{\boldsymbol{x}}(t)+\frac{1}{6}T^{2}\ddot{\boldsymbol{x}}(t)+\cdotsTx(t+T)−x(t)=x˙(t)+21Tx¨(t)+61T2x¨(t)+⋯
对比双线性变换公式:
x(t+T)−x(t)T=12(x˙(t)+x˙(t+T))=12x˙(t)+12(x˙(t)+Tx¨(t)+12T2x¨(t)+⋯)=x˙(t)+12Tx¨(t)+14T2x¨(t)+⋯\begin{align*} \frac{\boldsymbol{x}(t + T)-\boldsymbol{x}(t)}{T}&=\frac{1}{2}(\dot{\boldsymbol{x}}(t)+\dot{\boldsymbol{x}}(t + T))\\ &=\frac{1}{2}\dot{\boldsymbol{x}}(t)+\frac{1}{2}\left(\dot{\boldsymbol{x}}(t)+T\ddot{\boldsymbol{x}}(t)+\frac{1}{2}T^{2}\ddot{\boldsymbol{x}}(t)+\cdots\right)\\ &=\dot{\boldsymbol{x}}(t)+\frac{1}{2}T\ddot{\boldsymbol{x}}(t)+\frac{1}{4}T^{2}\ddot{\boldsymbol{x}}(t)+\cdots \end{align*} Tx(t+T)−x(t)=21(x˙(t)+x˙(t+T))=21x˙(t)+21(x˙(t)+Tx¨(t)+21T2x¨(t)+⋯)=x˙(t)+21Tx¨(t)+41T2x¨(t)+⋯
可得双线性变换近似误差为采样周期的二阶精度O(T2)O(T^{2})O(T2)。
4 龙格库塔法
由拉格朗日中值定理,若函数 f(x)f(x)f(x) 满足在闭区间[a,b][a, b][a,b]上连续,在开区间 (a,b)(a, b)(a,b) 上可导,则在 (a,b)(a, b)(a,b)上至少存在一点 ξ\xiξ 使等式 f(b)−f(a)=f′(ξ)(b−a)f(b) - f(a) = f'(\xi)(b - a)f(b)−f(a)=f′(ξ)(b−a) 成立。
因此,x(kT+T)\boldsymbol{x}(kT + T)x(kT+T) 的准确解为 x(kT+T)=x(kT)+x˙(ξ)T\boldsymbol{x}(kT + T) = \boldsymbol{x}(kT) + \dot{\boldsymbol{x}}(\xi)Tx(kT+T)=x(kT)+x˙(ξ)T。前向差分法和后向差分法相当于分别用区间端点的斜率近似,即 x˙(ξ)=x˙(kT)\dot{\boldsymbol{x}}(\xi) = \dot{\boldsymbol{x}}(kT)x˙(ξ)=x˙(kT) 与 x˙(ξ)=x˙(kT+T)\dot{\boldsymbol{x}}(\xi) = \dot{\boldsymbol{x}}(kT + T)x˙(ξ)=x˙(kT+T),显然不够准确。基于此,龙格库塔法的核心思想是通过区间多点采样逼近 x˙(ξ)\dot{\boldsymbol{x}}(\xi)x˙(ξ) 实现更精确的离散化估计,其中采样点数定义为龙格库塔法的阶数。欧拉法可视为一阶龙格库塔法。
一般地,令 x˙(t)=f(x,t)\dot{\boldsymbol{x}}(t) = f(\boldsymbol{x}, t)x˙(t)=f(x,t),x(kT)=xk\boldsymbol{x}(kT) = \boldsymbol{x}_kx(kT)=xk, kT=tkkT = t_kkT=tk ,则泰勒展开
xk+1=xk+Tx˙k+12T2x¨k+O(T3)\boldsymbol{x}_{k+1} = \boldsymbol{x}_k + T\dot{\boldsymbol{x}}_k + \frac{1}{2}T^2\ddot{\boldsymbol{x}}_k + O(T^3)xk+1=xk+Tx˙k+21T2x¨k+O(T3)
其中 x¨(t)=df(x,t)/dt=ft(x,t)+f(x,t)⋅fx(x,t)⇒x¨k=ft(xk,tk)+f(xk,tk)⋅fx(xk,tk)\ddot{\boldsymbol{x}}(t) = \mathrm{d}f(\boldsymbol{x}, t)/\mathrm{d}t = f_t(\boldsymbol{x}, t) + f(\boldsymbol{x}, t) \cdot f_{\boldsymbol{x}}(\boldsymbol{x}, t) \Rightarrow \ddot{\boldsymbol{x}}_k = f_t(\boldsymbol{x}_k, t_k) + f(\boldsymbol{x}_k, t_k) \cdot f_{\boldsymbol{x}}(\boldsymbol{x}_k, t_k)x¨(t)=df(x,t)/dt=ft(x,t)+f(x,t)⋅fx(x,t)⇒x¨k=ft(xk,tk)+f(xk,tk)⋅fx(xk,tk)。代入上式可得
xk+1=xk+Tf+12T2(ft+ffx)+O(T3)\boldsymbol{x}_{k+1} = \boldsymbol{x}_k + Tf + \frac{1}{2}T^2(f_t + ff_{\boldsymbol{x}}) + O(T^3)xk+1=xk+Tf+21T2(ft+ffx)+O(T3)
二阶龙格库塔法在区间[tk,tk+1][t_k, t_{k+1}][tk,tk+1]上采样两个点,分别记为
{k1=f(xk,tk)k2=f(xk+c1k1T,tk+c2T)⟹xk+1=xk+(λ1k1+λ2k2)T\begin{cases} k_1 = f(x_k, t_k) \\ k_2 = f(x_k + c_1 k_1 T, t_k + c_2 T) \end{cases} \implies x_{k+1} = x_k + (\lambda_1 k_1 + \lambda_2 k_2) T{k1=f(xk,tk)k2=f(xk+c1k1T,tk+c2T)⟹xk+1=xk+(λ1k1+λ2k2)T
其中λi\lambda_iλi与cic_ici均为待定系数。对k2k_2k2一阶泰勒展开有:
k2=f(xk+c1k1T,tk+c2T)=f+c2Tft+c1Tfx+O(T3)k_2 = f(x_k + c_1 k_1 T, t_k + c_2 T) = f + c_2 T f_t + c_1 T f_{x} + \mathrm{O}(T^3)k2=f(xk+c1k1T,tk+c2T)=f+c2Tft+c1Tfx+O(T3)
将k1k_1k1和k2k_2k2代入xk+1x_{k+1}xk+1可得:
xk+1=xk+(λ1+λ2)Tf+T22(2λ2c2ft+2c1λ2fxx)+O(T3)x_{k+1} = x_k + (\lambda_1 + \lambda_2) T f + \frac{T^2}{2} \left( 2 \lambda_2 c_2 f_t + 2 c_1 \lambda_2 f_{xx} \right) + \mathrm{O}(T^3)xk+1=xk+(λ1+λ2)Tf+2T2(2λ2c2ft+2c1λ2fxx)+O(T3)
对比系数可知:
{λ1+λ2=1λ2c1=λ2c2=12\begin{cases} \lambda_1 + \lambda_2 = 1 \\ \lambda_2 c_1 = \lambda_2 c_2 = \frac{1}{2} \end{cases}{λ1+λ2=1λ2c1=λ2c2=21
这个不定方程的一组可行解为λ1=λ2=1/2,c1=c2=1\lambda_1 = \lambda_2 = 1/2,c_1 = c_2 = 1λ1=λ2=1/2,c1=c2=1,所以二阶龙格库塔法表述为:
xk+1=xk+(12k1+12k2)T,{k1=f(xk,tk)k2=f(xk+T,tk+1)x_{k+1} = x_k + \left( \frac{1}{2} k_1 + \frac{1}{2} k_2 \right) T, \quad \begin{cases} k_1 = f(x_k, t_k) \\ k_2 = f(x_k + T, t_k + 1) \end{cases}xk+1=xk+(21k1+21k2)T,{k1=f(xk,tk)k2=f(xk+T,tk+1)
二阶龙格库塔法也称为改进欧拉法。依次类推,可以得到高阶龙格库塔法公式。四阶龙格库塔法达到了精度和效率的最佳平衡,因此工程中应用最广泛。接下来推导基于状态方程的四阶龙格库塔法积分。假定状态方程时不变,则
xk+1=xk+T6(k1+2k2+2k3+k4),{k1=f(xk,uk)k2=f(xk+k12T,uk)k3=f(xk+k22T,uk)k4=f(xk+k3T,uk)\boldsymbol{x}_{k+1}=\boldsymbol{x}_k+\frac{T}{6}\left( \boldsymbol{k}_1+2\boldsymbol{k}_2+2\boldsymbol{k}_3+\boldsymbol{k}_4 \right) , \begin{cases} \boldsymbol{k}_1=\boldsymbol{f}\left( \boldsymbol{x}_k, \boldsymbol{u}_k \right)\\ \boldsymbol{k}_2=f\left( \boldsymbol{x}_k+\frac{\boldsymbol{k}_1}{2}T, \boldsymbol{u}_k \right)\\ \boldsymbol{k}_3=f\left( \boldsymbol{x}_k+\frac{\boldsymbol{k}_2}{2}T, \boldsymbol{u}_k \right)\\ \boldsymbol{k}_4=f\left( \boldsymbol{x}_k+\boldsymbol{k}_3T, \boldsymbol{u}_k \right)\\\end{cases}xk+1=xk+6T(k1+2k2+2k3+k4),⎩⎨⎧k1=f(xk,uk)k2=f(xk+2k1T,uk)k3=f(xk+2k2T,uk)k4=f(xk+k3T,uk)
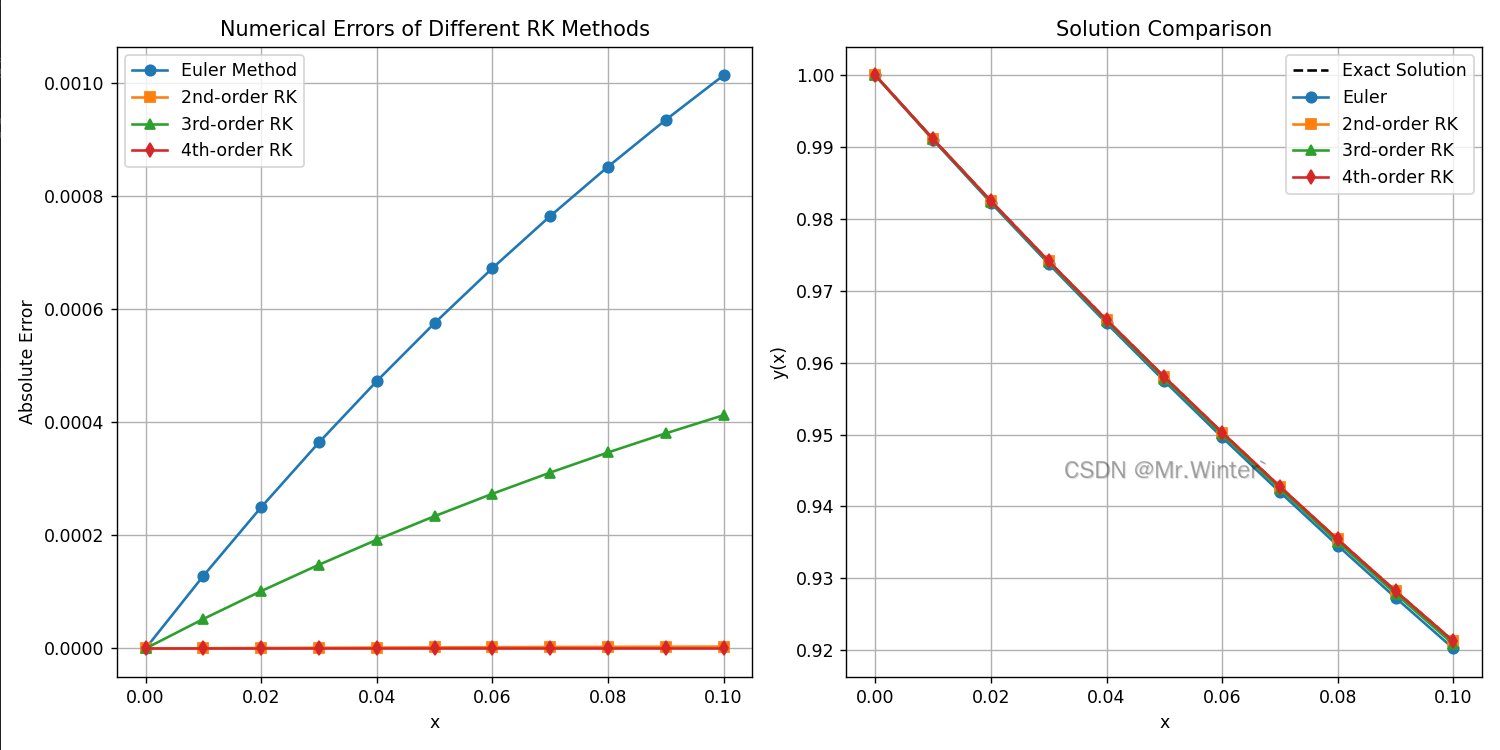
5 Python实验
定义微分方程
y′=f(x,y)=−0.9y1+2xy'= f(x, y) = -\frac{0.9 y}{1 + 2x}y′=f(x,y)=−1+2x0.9y
其解析解为
yexact(x)=(1+2x)−0.45y_{\text{exact}}(x) = (1 + 2x)^{-0.45}yexact(x)=(1+2x)−0.45
-
欧拉法实现
def euler(f, x0, y0, h, n):x = np.zeros(n + 1)y = np.zeros(n + 1)x[0], y[0] = x0, y0for i in range(n):y[i + 1] = y[i] + h * f(x[i], y[i])x[i + 1] = x[i] + hreturn x, y -
改进欧拉法实现
def rk2(f, x0, y0, h, n):x = np.zeros(n + 1)y = np.zeros(n + 1)x[0], y[0] = x0, y0for i in range(n):k1 = f(x[i], y[i])k2 = f(x[i] + h, y[i] + h * k1)y[i + 1] = y[i] + h * (k1 + k2) / 2x[i + 1] = x[i] + hreturn x, y -
三阶龙格库塔法
def rk3(f, x0, y0, h, n):x = np.zeros(n + 1)y = np.zeros(n + 1)x[0], y[0] = x0, y0for i in range(n):k1 = f(x[i], y[i])k2 = f(x[i] + h / 2, y[i] + h * k1 / 2)k3 = f(x[i] + h, y[i] - h * (k1 + 2 * k2))y[i + 1] = y[i] + h * (k1 + 4 * k2 + k3) / 6x[i + 1] = x[i] + hreturn x, y -
四阶龙格库塔法
def rk4(f, x0, y0, h, n):x = np.zeros(n + 1)y = np.zeros(n + 1)x[0], y[0] = x0, y0for i in range(n):k1 = f(x[i], y[i])k2 = f(x[i] + h / 2, y[i] + h * k1 / 2)k3 = f(x[i] + h / 2, y[i] + h * k2 / 2)k4 = f(x[i] + h, y[i] + h * k3)y[i + 1] = y[i] + h * (k1 + 2 * k2 + 2 * k3 + k4) / 6x[i + 1] = x[i] + hreturn x, y
完整工程代码请联系下方博主名片获取
🔥 更多精彩专栏:
- 《ROS从入门到精通》
- 《Pytorch深度学习实战》
- 《机器学习强基计划》
- 《运动规划实战精讲》
- …