【模电笔记】—— 波形发生电路(波形振荡器)
Tips:本章节的笔记仅记录关于较低频率的模拟信号的波形发生电路,如RC正弦波(RC串并联网络)振荡电路。
一、波形发生电路的概念
波形发生电路又称为波形振荡器,是不需要外加激励信号就能产生输出信号的电路。
二、正弦波振荡电路的分析
1.产生正弦波振荡的条件
正弦波振荡电路产生一定幅值、频率的正弦波输出信号,是自激振荡电路。其产生振荡的条件为![]() (即开环放大倍数相量×反馈系数相量=1),具体为:
(即开环放大倍数相量×反馈系数相量=1),具体为:
(1)幅度平衡条件:![]() ,表示电路已达到稳幅振荡时的情况,电路输出量自维持在
,表示电路已达到稳幅振荡时的情况,电路输出量自维持在![]() 。
。
(2)相位平衡条件:![]() 。
。
实际振荡情况是先起振再达到稳幅的过程,电路的起振条件为![]() 。
。
Tips:不能无限振荡的原因是:半导体元器件的非线性特性、供电电源有限。
2.正弦波振荡电路的组成
(1)放大电路:实现电路的放大作用。
(2)正反馈网络:满足相位平衡条件。(常与选频网络合二为一)
(3)选频网络:获得单一频率的正弦波振荡信号,由电阻和电抗元件组成。
(4)稳幅环节:使输出信号稳定在所需范围。
3.判断电路能否产生正弦波振荡的分析方法
(1)电路是否具备上述4个组成部分。
(2)电路的Q点(静态工作点)设置是否合适,动态信号能否正常放大。
(3)用瞬时极性法判断相位平衡条件![]() (即是否有正反馈)。
(即是否有正反馈)。
(4)电路是否满足![]() 。
。
三、RC正弦波(RC串并联网络)振荡电路
正弦波电路一般由选频网络来命名,可分为:RC正弦波振荡电路(1MHz以下)、LC正弦波振荡电路(几百kHz~几百MHz)、石英晶体正弦波振荡电路(振荡频率稳定性很高) 。
1.RC串并联选频网络的选频特性
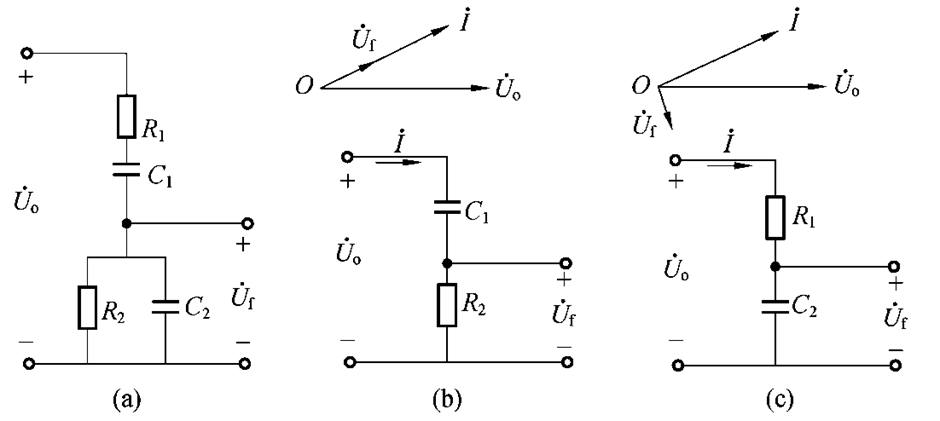
RC串并联选频网络如上图(a)所示。对于R、C,串联后元件的阻抗值,哪个值大留哪个;并联后元件的阻抗值,哪个值小留哪个。
(1)当频率 f 很低时,![]() ,图(a)等效为图(b),
,图(a)等效为图(b),![]() 相位超前
相位超前![]() 。
。
(2)当频率 f 很高时,![]() ,图(a)等效为图(c),
,图(a)等效为图(c),![]() 相位滞后
相位滞后![]() 。
。
(3)推导计算(推导过程未给出,感兴趣的可自查)出![]() ,其中
,其中![]() 。用幅值和相角表示为:
。用幅值和相角表示为:
![]() ,
,![]() ,图像分别见下图(d)(e)。
,图像分别见下图(d)(e)。
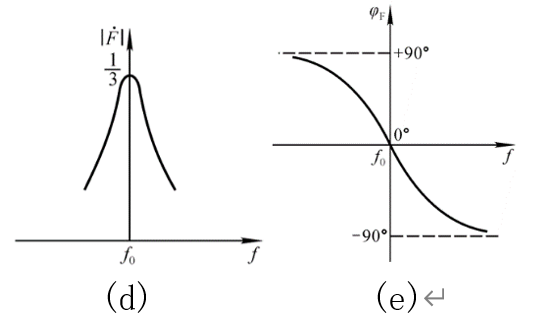
由此可知, ![]() 时,
时,![]() ,表明
,表明![]() 和
和![]() 相位相同,此时
相位相同,此时![]() 幅值最大为
幅值最大为![]() 。
。
2.RC振荡电路的起振条件
若要产生振荡频率为![]() 的正弦波信号,应为RC串并联网络配置一个
的正弦波信号,应为RC串并联网络配置一个![]() 、输入电阻
、输入电阻![]() ,输出电阻
,输出电阻![]() 的放大电路(即要求输入电阻尽量大,输出电阻尽量小)。
的放大电路(即要求输入电阻尽量大,输出电阻尽量小)。
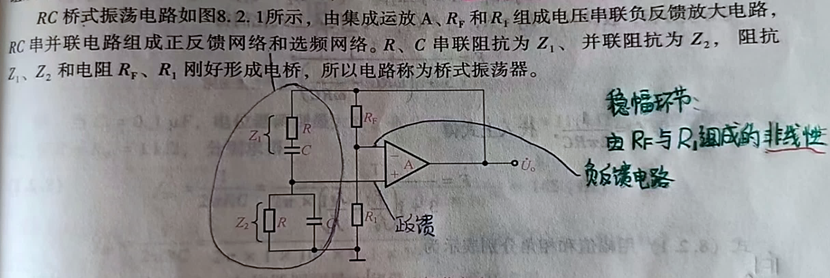
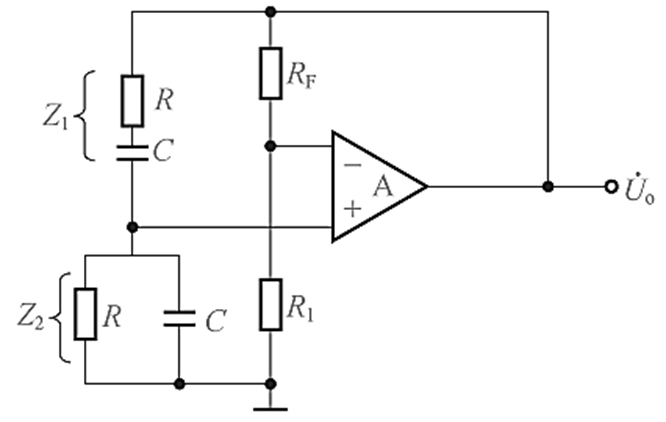
在RC桥式振荡电路中,还应满足![]() (这是对由单一振荡频率的选频网络构成振荡电路的要求。在实际应用中,振荡频率是可调变化的,一般在选频网络中增加电容或可调电阻,通过改变C或R的值,使振荡频率发生变化)。RC桥式振荡电路(上面已给出,为方便对应公式再次摆出)如下:
(这是对由单一振荡频率的选频网络构成振荡电路的要求。在实际应用中,振荡频率是可调变化的,一般在选频网络中增加电容或可调电阻,通过改变C或R的值,使振荡频率发生变化)。RC桥式振荡电路(上面已给出,为方便对应公式再次摆出)如下:
四、非正弦波信号发生电路
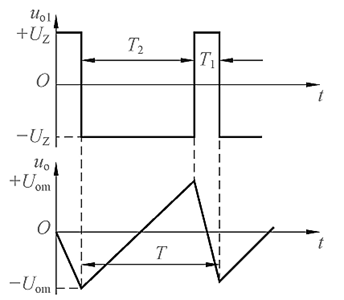
1.矩形波发生电路
(1)基本组成部分
输出无稳态,有两个暂态:若输出为高电平时定义为第一暂态,若输出为低电平为第二暂态。
①开关电路:输出只有高电平和低电平两种情况,因而采用电压比较器。
②反馈网络:为在输出为某一状态时提供翻转成另一状态的条件,应引入反馈。
③延迟环节:使得两个状态均维持一定的时间,决定振荡频率,利用RC电路实现。
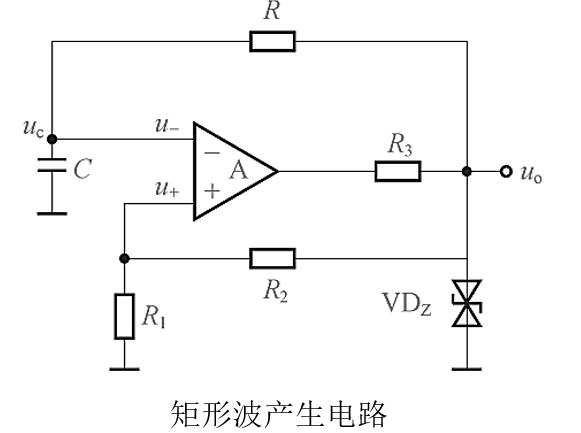
(2)电路组成及矩形波产生过程
如下左图所示,它是在滞回比较器的基础上,增加一个R、C组成的积分电路。稳压管和
的作用是将滞回比较器的输出电压
![]() 钳位在
钳位在![]() 。
。
①假设t=0时,![]() ,
,![]() ,则同相输入端处
,则同相输入端处![]() ,
,![]() 通过R向C充电,使
通过R向C充电,使![]() 由0逐渐↑ ;
由0逐渐↑ ;![]() 充电一段时间后,上升到
充电一段时间后,上升到![]() 时,滞回比较器的
时,滞回比较器的![]() 就会翻转,从
就会翻转,从![]() 跳变成
跳变成![]() 。
。
②![]() 时,同相输入端处
时,同相输入端处![]() ,C开始通过R放电,使
,C开始通过R放电,使![]() 逐渐↓ ;
逐渐↓ ;![]() 放电一段时间后,下降到
放电一段时间后,下降到![]() 时,滞回比较器的
时,滞回比较器的![]() 再次翻转,从
再次翻转,从![]() 跳变成
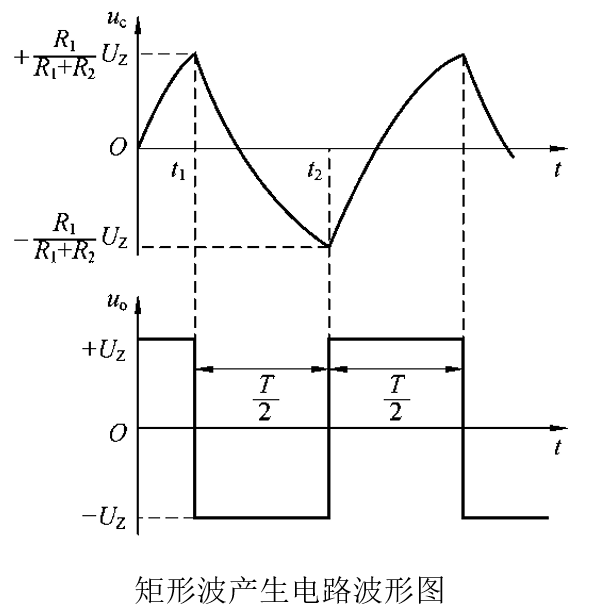
跳变成![]() 。如此循环则形成一系列矩形波输出,如上右图所示。
。如此循环则形成一系列矩形波输出,如上右图所示。
(3)矩形波高、低电平所占时间相等,均为半个周期,这是因为电容充放电时间常数![]() 相等。其振荡周期
相等。其振荡周期![]()
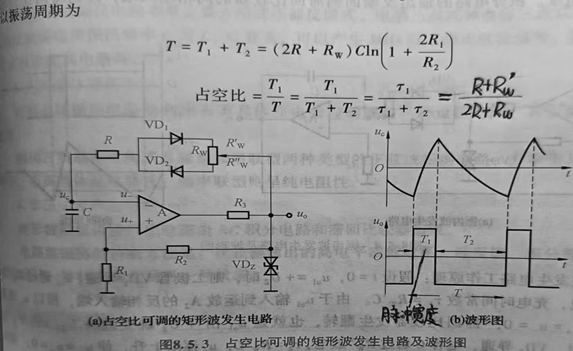
(4)若电容的充、放电时间常数不同,![]() ,则占空比
,则占空比![]()
![]() 。通常占空比设置为可调的,具体如下:
。通常占空比设置为可调的,具体如下:
2.其他波形发生电路 (简述)
1.三角波发生电路
用积分运算电路可将方波变为三角波。
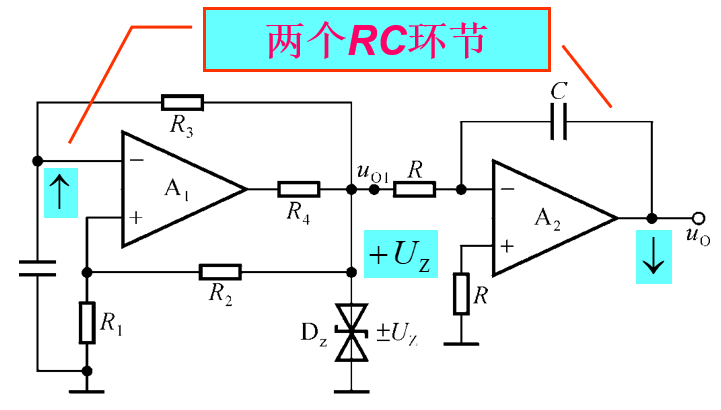
实际上,上图电路如下图所示 :
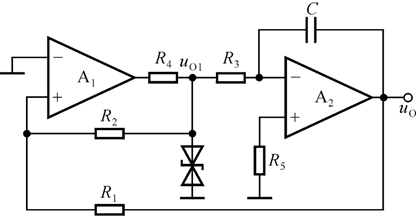
产生的三角波形图如下:
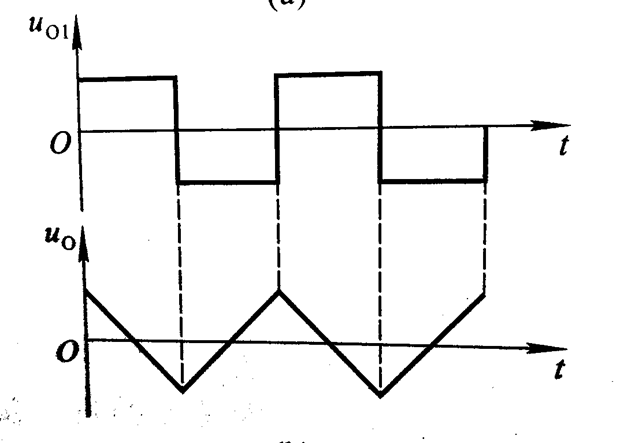
2.锯齿波发生电路
改变三角波电路中方波()的占空比,即可产生锯齿波。
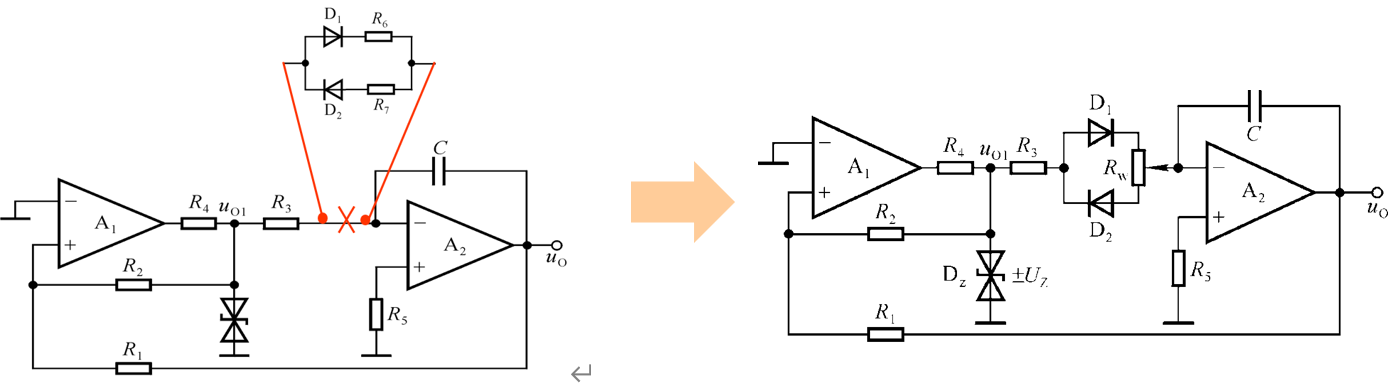
产生的锯齿波形图如下: