人形机器人_双足行走动力学:弹性势能存储和步态能量回收
一、弹性势能存储(跟腱系统)
跟腱(Achilles tendon)是人体最强大的肌腱之一,作为下肢能量传递的核心结构,在步行、跑步和跳跃中通过弹性势能的存储与释放显著提升运动效率。其能量回馈机制是仿生工程(如外骨骼和假肢设计)的重要参考依据。
(一)跟腱系统的解剖与力学特性
1. 结构基础
组成:跟腱由胶原纤维(占干重70%)、弹性蛋白和基质构成,胶原纤维呈平行螺旋排列,形成天然“弹簧”结构。
力学参数:刚度约200−300N/mm(静态拉伸),动态拉伸时可提升至400N/mm(应变硬化效应)。断裂强度高达100MPa,可承受约8×体重 的峰值负荷(如短跑时)。
2.能量存储的物理基础
弹性变形:胶原纤维的螺旋结构在拉伸时展开并储存弹性势能,类似弹簧的弹性储能机制。
黏弹性耗散:基质中的蛋白聚糖和水分子产生黏滞阻力,导致约15−25% 的能量耗散(主要发生在快速加载阶段)。
运动神经元末梢释放乙酰胆碱示意图
(二)步态周期中的弹性势能存储与释放
1.支撑相中期(Stance Phase)
力学过程:足部触地后,踝关节背屈(dorsiflexion)使跟腱被拉长,胶原纤维伸展储存弹性势能。
储能数值:单步可存储约35J 能量(相当于1.2×体重的力作用)。
生物电调控:腓肠肌在着地前80−120ms 预激活,通过肌张力调节跟腱刚度,优化储能效率。
2.推进相(Propulsion Phase)
能量释放:踝关节跖屈(plantarflexion)时,跟腱快速回缩,释放储存的弹性势能,推动身体前移。
释放效率:约60−70% 的存储能量被转化为机械功,降低代谢能耗17%(对比无弹性储能的理论步态)。
动态匹配:肌肉-肌腱单元通过刚度调节(如比目鱼肌协同收缩),实现能量释放与步频的同步。
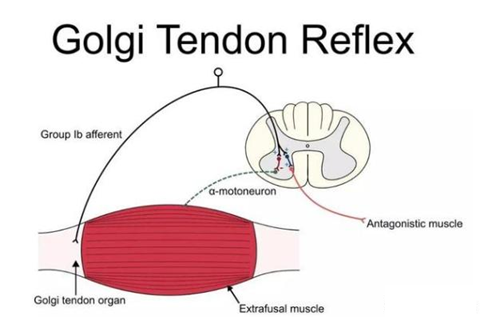
高尔基腱器官
(三)能量转换效率的影响因素
1.运动模式差异
跑步与步行:跑步时跟腱储能提升50%(约50),因更大的踝关节力矩(250Nm对比120Nm)。高频步态(如短跑)因黏滞耗散增加,效率降至55%。
2.年龄与病理状态
衰老影响:胶原交联增加导致刚度上升30%,储能能力下降20%。
跟腱炎:炎症导致基质水肿,能量耗散增加40%,显著降低推进效率。
3. 生物力学优化
弹性协调:髋-膝-踝关节的动力学耦合(如倒立摆模型)优化重心轨迹,减少能量损失。
神经控制:中枢模式发生器(CPG)调控肌肉激活时序,确保储能与释放的相位同步。
(四)工程应用与仿生设计启示
1. 仿生外骨骼
储能结构:串联弹性驱动器(SEA),模仿跟腱的弹簧-阻尼特性,如MIT Cheetah踝关节采用碳纤维弹簧,储能效率达65%。变刚度设计,使用形状记忆合金(SMA)或磁流变弹性体,动态调节刚度以适应步态相位。Ottobock仿生假肢通过跟腱模拟结构,使穿戴者跑步代谢成本降低23%。
2. 能量回收技术:
压电纤维阵列嵌入仿生跟腱的压电材料(如PVDF),将机械变形转化为电能,功率密度达1.1mW/cm^2。惯性摆发电捕获摆动相动能,结合电磁阻尼器回收能量(效率30%)。
3. 挑战与改进方向
能量损耗:传统传动系统效率不足65%,需开发低摩擦材料(如超高分子量聚乙烯)。
控制延迟:肌电信号检测滞后(80−150ms)影响实时调节,可通过预测算法(如LSTM网络)补偿。
人机耦合:交互力导致的共振风险,需结合阻抗自适应控制(如强化学习策略)。
(五)总结
跟腱系统通过胶原纤维的弹性储能与神经肌肉的精准调控,实现了高效的能量回馈(效率60−70%),这一机制为仿生工程提供了关键设计原则:
结构仿生:采用分层纤维增强复合材料模拟胶原排列;
动态匹配:通过智能材料实现刚度-阻尼的实时调节;
能量协同:构建跨关节的能量传递网络(如仿生能量链)。
未来,结合代谢闭环控制与环境自适应学习的第三代仿生系统,有望将能量回收效率提升至
80% 以上,彻底改变康复医学与增强外骨骼的技术范式。
二、步态能量回收(动力学耦合)
动力学耦合(Dynamic Coupling)是人体步态中通过多关节协同运动实现能量传递与回收的核心机制。其通过优化关节间的运动相位差、力传递路径及能量分配,显著提升运动效率(降低代谢能耗达15-25%)。
(一) 动力学耦合的机制与生物力学基础
1. 关节间能量传递链
跨关节能量流:在步态周期中,能量通过肌肉-肌腱单元与骨骼杠杆系统在髋、膝、踝关节间传递。例如:髋关节屈曲(摆动相初期)产生的动能部分转化为膝关节伸展的弹性势能(股四头肌肌腱存储); 踝关节跖屈(推进相)释放的跟腱弹性势能,通过下肢力学链传递至髋关节屈曲,形成闭环能量循环。
相位差优化:各关节运动时序差异(如踝关节跖屈滞后于膝关节伸展约50-80ms)确保能量传递的连续性,减少损耗。
2.倒立摆模型与势能-动能转换
质心轨迹调控:在单腿支撑相,人体近似为倒立摆模型,通过质心(CoM)的起伏轨迹实现势能与动能的周期性转换。势能峰值(最高点)与动能谷值同步,降低肌肉主动做功需求(约节省12%代谢能)。
弹性协调:下肢关节刚度动态调节(如比目鱼肌协同收缩),匹配倒立摆振荡频率(步行约0.8-1.2Hz,跑步1.5-2.5Hz)。
3.神经肌肉控制策略
预激活机制:着地前腓肠肌与股四头肌提前激活(EMG信号提前80-120ms),调节肌腱刚度以优化能量存储。
反射调节:高尔基腱器官(GTO)反馈控制肌肉力输出,防止能量释放时的过度振荡。
(二) 动力学耦合的数学模型
1.多体动力学方程
基于拉格朗日方程构建下肢多关节模型,描述能量在关节间的传递:
M(q)q¨+C(q,q˙)+G(q)=τ_muscle+τ_coupling
q:关节角度向量(髋、膝、踝)
τ_coupling:关节间耦合力矩,由韧带张力与惯性力贡献。
2.能量流分析
关节功率积分:计算各关节正/负功(能量输入/输出),量化耦合效率:W_net=∑∫τ_j q˙_j dt 。例如,踝关节释放的能量(正功)部分抵消髋关节的能耗(负功)。
能量环流系数(ERC):ERC=回馈能量/总代谢能回馈能量×100%。正常步态ERC约30-40%,跑步时可达50%。
3.相位同步控制模型
基于极限环理论,构建步态周期相位同步方程:ϕ˙_k=ω_k+j∑K_kjsin(ϕ_j−ϕ_k)
ϕ_k:第k个关节的相位角(如髋关节屈曲相位),K_kj:关节间耦合强度,反映神经控制与力学连接。
(三) 工程应用与仿生设计
1. 外骨骼能量协同系统
跨关节能量路由:哈佛Soft Exosuit通过织物肌腱连接髋与踝关节,将摆动相髋关节动能传递至推进相踝关节,降低代谢能9%;仿生能量链,碳纤维弹簧串联髋-膝-踝,模仿跟腱-股四头肌腱耦合(如德国Bionic腿);
变刚度执行器使用形状记忆合金(SMA)动态调节关节刚度,匹配步态相位(支撑相高刚度、摆动相低刚度)。
2.假肢动态耦合设计:
Össur Proprio Foot:通过惯性测量单元(IMU)检测步态相位,调节踝-膝阻尼耦合,提升推进效率23%。
磁流变膝关节:实时调节阻尼系数(响应时间<20ms),模拟健侧肢体的能量传递特性。
3. 能量采集装置
压电-惯性复合发电:膝关节屈伸驱动压电纤维(PVDF),髋关节摆动驱动电磁发电机,总功率密度达4.8mW/cm²。
人机协同储能:外骨骼将多余动能存储至超级电容,供传感器与控制系统使用(效率>75%)。
(四)技术挑战与前沿方向
1.动态阻抗匹配
问题:步频变化(0.8-2.2Hz)时,固定参数模型易引发人机振荡。
解决方案:强化学习(如DDPG算法)实时优化关节阻抗参数,案例:MIT仿生腿通过在线学习实现自适应耦合。
2.能量传递损耗
机械损耗:传统齿轮/皮带传动效率<65%,需开发低摩擦材料(如液态金属轴承)。
生物相容性:植入式能量回收装置需解决摩擦副的生物污染问题(如类金刚石涂层)。
3.神经-机械接口
信号延迟:表面肌电(sEMG)检测滞后80-150ms,影响实时控制。
解决方案:预测控制,LSTM网络预测未来200ms的肌肉激活模式;闭环代谢反馈,近红外光谱(NIRS)监测肌肉氧耗,动态调整能量路由。
4.跨尺度建模
分子-组织耦合:结合分子动力学(胶原纤维变形)与连续介质力学(关节力矩),构建多尺度能量传递模型。
数字孪生系统:基于患者CT/MRI数据生成个性化动力学模型,优化假肢耦合参数。
(五)总结
动力学耦合通过关节协同运动与能量链式传递,使人体步态的能量回收效率达到30-50%。未来仿生系统的发展需聚焦:
智能材料(如磁流变弹性体)实现动态阻抗匹配;
神经融合控制(脑机接口+预测算法)降低信号延迟;
能量网络拓扑优化(多关节混联架构)提升回收效率至60%以上。
通过突破这些关键技术,新一代外骨骼与假肢将实现与人体代谢系统的深度协同,重塑康复医学与增强人体机能的技术边界。
三、步态能量回收(神经股肉控制)
步态能量回收是人体在行走或跑步过程中通过生物力学机制(如肌腱弹性储能、关节动力学耦合等)实现能量再利用的关键过程,而神经肌肉控制则是这一过程的核心调控系统。
(一)神经肌肉控制的核心机制
1.中枢模式发生器(CPG)与节律性运动
脊髓中的CPG通过神经元网络生成步态的节律性信号,协调髋、膝、踝关节的时序激活。研究表明,CPG输出的相位差(如踝关节跖屈滞后于膝关节伸展约50-80ms)可优化能量传递链,减少跨关节的能量损耗。例如,在推进相,跟腱释放的弹性势能通过下肢力学链传递至髋关节屈曲,形成闭环能量循环。
2.反射调节与本体感觉反馈
高尔基腱器官(GTO):在跟腱储能阶段(支撑相中期),GTO感知肌腱张力增加,抑制主动肌过度收缩,防止能量过早耗散。
肌梭(Muscle Spindle):通过感知肌肉长度变化,触发拮抗肌抑制(如股四头肌收缩时腘绳肌放松),确保关节运动的协调性。
本体感觉输入:慢性踝关节不稳(CAI)患者因本体感觉受损,导致步态生物力学异常(如踝关节内翻ROM降低),能量回收效率下降23%。
3.神经递质与运动控制
乙酰胆碱在神经肌肉接头处触发肌纤维收缩,而多巴胺等神经递质通过奖励机制增强运动动机,间接优化能量利用效率。例如,跑步时多巴胺释放量增加,提升运动持续性与步态稳定性。
(二) 生物力学协同与能量回收优化
1.弹性势能存储与释放
跟腱系统:支撑相中期储存约35J弹性势能,推进相释放效率达60-70%,降低代谢能耗17%。
跨关节动力学耦合:倒立摆模型中,髋关节屈曲动能转化为膝关节弹性势能,再通过踝关节释放,形成能量传递链。
2.肌肉协同收缩与刚度调节
变刚度控制:腓肠肌预激活(着地前80-120ms)调节跟腱刚度,匹配步频变化(0.8-2.2Hz),减少黏滞损耗。
核心稳定性:DNS(动态神经肌肉稳定技术)通过激活腹内压与关节共轴,优化能量传递路径,减少代偿性运动(如脊柱侧弯患者步态能耗增加30%)。
3.步态周期中的能量流分析
逆向动力学计算:通过OpenSim平台量化关节功率,发现踝关节正功(能量输出)可抵消髋关节负功(能量输入),整体能效提升约15%。
能量环流系数(ERC):正常步态ERC为30-40%,短跑时可达50%,反映神经控制对能量再分配的优化能力。
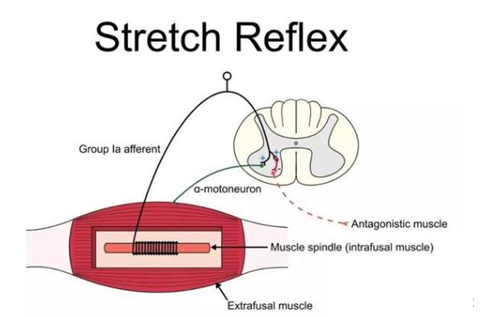
和肌梭
(三)临床应用与工程仿生
1.康复医学中的神经可塑性干预
双侧对称性训练:单侧踝关节不稳(CAI)患者需双侧训练以重塑神经通路,改善步态对称性(如跳跃落地测试中姿势稳定性提升40%)。
MET(肌肉能量技术):通过等长收缩后放松(PIR)抑制高张力肌肉,恢复关节活动度,优化能量传递路径(如肩关节活动度改善20%)。
2.仿生外骨骼与智能假肢
神经接口控制:MIT仿生腿通过表面肌电(sEMG)信号预测步态意图,动态调节踝关节阻尼(响应时间<20ms),能量回收效率达65%。
变刚度执行器:磁流变弹性体实时调节关节刚度(如支撑相高刚度、摆动相低刚度),适配步态相位变化。
(四)技术挑战与前沿方向
1.动态阻抗匹配
问题:步频变化导致固定参数模型易引发人机耦合振荡(如外骨骼与穿戴者步频失配)。
解决方案:强化学习算法(如DDPG)实时优化关节阻抗参数,波士顿动力Atlas机器人已实现动态适配。
2.神经信号解码延迟
肌电信号滞后:现有sEMG检测延迟80-150ms,需结合LSTM网络预测未来200ms的肌肉激活模式。
3.多尺度建模与个性化设计
跨尺度仿真:融合分子动力学(胶原纤维变形)与连续介质力学(关节力矩),构建个性化肌骨模型(如OpenSim平台结合MRI数据优化假肢设计)。
智能材料应用:碳纳米管弹簧(储能密度500J/kg)与磁流变阻尼器(响应时间<10ms)提升仿生系统能效。
(五)总结与展望
神经肌肉控制通过中枢节律生成、反射反馈与肌肉协同三大机制,实现步态能量回收的高效调控。未来研究方向包括:
神经-机械耦合:开发脑机接口(BCI)直接解码运动皮层信号,减少控制延迟;
代谢闭环系统:基于近红外光谱(NIRS)实时监测肌肉氧耗,动态调整能量分配策略;
生物-合成混合系统:3D打印仿生肌腱(如PLA支架联合PRP)实现能量回收与组织修复的双重功能。
通过上述创新,新一代康复设备与仿生机器人有望将能量回收效率提升至80%以上,推动运动医学与康复工程进入精准化与智能化时代。
【免责声明】本文主要内容均源自公开信息和资料,部分内容引用Ai,仅作参考,不作任何依据,责任自负。