深度相机---像素转物理尺寸
深度相机(如TOF相机、结构光相机、双目立体相机)的核心价值在于能同时输出二维图像和三维深度信息,而将图像中的像素尺寸转换为真实物理尺寸(如米、毫米)是其在工业测量、机器人导航、三维重建等领域的关键应用。这一转换过程涉及光学原理、坐标系转换、相机校准等多方面知识,需结合深度信息、相机内参、视场角等参数,通过几何关系推导实现。
一、核心概念与坐标系基础
在进行像素到物理尺寸的转换前,需明确四个核心坐标系及它们之间的映射关系。
1. 四个关键坐标系
- 像素坐标系(u, v):图像中像素的位置,以左上角为原点(0,0),横向为u轴(像素列),纵向为v轴(像素行),单位为“像素”。例如,640×480分辨率的图像中,像素坐标范围为u∈[0,639],v∈[0,479]。
- 图像坐标系(x, y):以像素物理尺寸为单位的二维坐标系,原点为图像光学中心(主点),x轴与u轴平行,y轴与v轴平行,单位为“米”(或毫米)。其与像素坐标系的关系为:x=(u−u0)pxx=(u-u_0)p_xx=(u−u0)px,y=(v−v0)pyy=(v-v_0)p_yy=(v−v0)py,其中u0,v0u_0,v_0u0,v0为主点的像素坐标(光学中心在图像中的像素位置),px,pyp_x,p_ypx,py为单个像素的物理宽高(如px=3μmp_x=3μmpx=3μm表示1像素的物理宽度为3微米)。
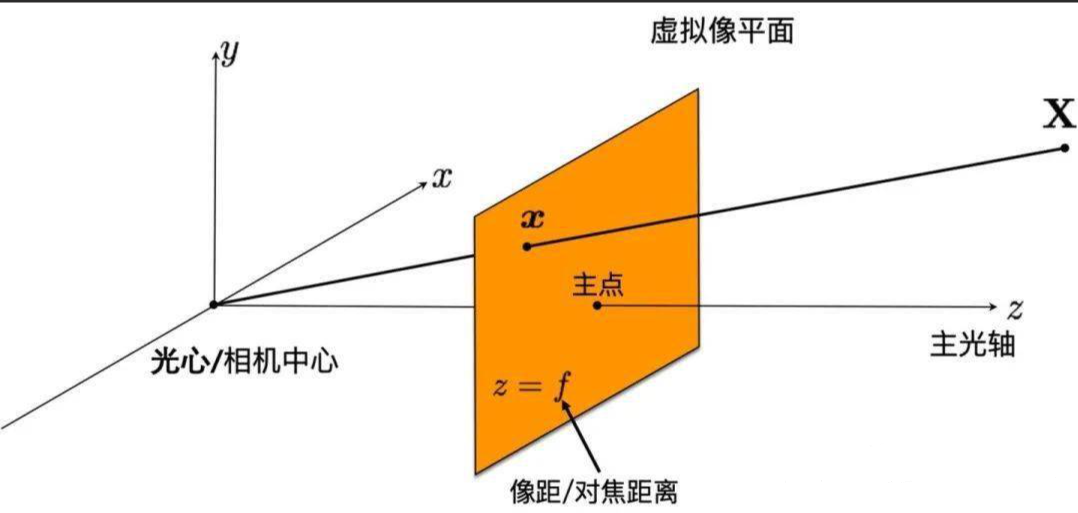
- 相机坐标系(X, Y, Z):以相机光心为原点的三维坐标系,Z轴为光轴方向(垂直于像平面),X轴与图像坐标系x轴平行,Y轴与y轴平行,单位为“米”。该坐标系是连接二维图像与三维物理空间的桥梁。
- 世界坐标系(X_w, Y_w, Z_w):自定义的三维参考坐标系(如地面坐标系、物体自身坐标系),需通过相机外参(旋转矩阵RRR、平移向量TTT)与相机坐标系关联。
2. 深度信息的本质
深度相机输出的“深度图”中,每个像素(u, v)对应的深度值ZZZ,本质是该点在相机坐标系中的Z坐标(即该点到光心的距离,单位通常为米或毫米)。
二、转换的核心原理:从像素坐标到物理尺寸
像素尺寸到物理尺寸的转换,本质是通过相机的光学参数(内参、视场角)和深度信息,建立“像素差”与“物理距离”的映射关系。其核心逻辑可概括为:先将像素坐标转换为相机坐标系下的三维坐标,再通过坐标系关系得到物理尺寸。
1. 相机内参:
相机内参矩阵(Intrinsic Matrix)是描述相机光学特性的关键参数,通过相机校准(如张正友标定法)获得,其表达式为:
K=[fx0u00fyv0001]K = \begin{bmatrix}
f_x & 0 & u_0 \\
0 & f_y & v_0 \\
0 & 0 & 1
\end{bmatrix}K=fx000fy0u0v01
其中:
- fx=f/pxf_x = f / p_xfx=f/px、fy=f/pyf_y = f / p_yfy=f/py:像素焦距(单位:像素),fff为镜头物理焦距(单位:米),px、pyp_x、p_ypx、py为单个像素的物理宽高(单位:米/像素);
- u0、v0u_0、v_0u0、v0:主点(光学中心)的像素坐标(通常接近图像中心,但受镜头装配影响可能偏移)。
2. 像素坐标到相机坐标系的转换
对于图像中任意像素(u, v),其在相机坐标系中的三维坐标(X, Y, Z)可通过内参矩阵推导:
-
先将像素坐标(u, v)转换为图像坐标系坐标(x, y):
x=(u−u0)⋅px,y=(v−v0)⋅pyx = (u - u_0) \cdot p_x, \quad y = (v - v_0) \cdot p_yx=(u−u0)⋅px,y=(v−v0)⋅py -
结合深度ZZZ(相机坐标系Z坐标),根据相似三角形原理(光心、像素点、三维空间点构成相似三角形),推导相机坐标系的X、Y坐标:
XZ=xf ⟹ X=Z⋅xf=Z⋅(u−u0)⋅pxf=Z⋅u−u0fx\frac{X}{Z} = \frac{x}{f} \implies X = Z \cdot \frac{x}{f} = Z \cdot \frac{(u - u_0) \cdot p_x}{f} = Z \cdot \frac{u - u_0}{f_x}ZX=fx⟹X=Z⋅fx=Z⋅f(u−u0)⋅px=Z⋅fxu−u0
同理:
Y=Z⋅v−v0fyY = Z \cdot \frac{v - v_0}{f_y}Y=Z⋅fyv−v0最终,像素(u, v)在相机坐标系中的三维坐标为:
(X,Y,Z)=(Z⋅u−u0fx,Z⋅v−v0fy,Z)(X, Y, Z) = \left( Z \cdot \frac{u - u_0}{f_x}, \quad Z \cdot \frac{v - v_0}{f_y}, \quad Z \right)(X,Y,Z)=(Z⋅fxu−u0,Z⋅fyv−v0,Z)
3. 物理尺寸的计算:基于两点坐标差
若需计算图像中两个点(u1,v1u_1, v_1u1,v1)和(u2,v2u_2, v_2u2,v2)之间的物理距离,可通过以下步骤:
-
分别获取两点的深度值Z1、Z2Z_1、Z_2Z1、Z2(若两点在同一平面且与相机平行,可近似取Z1=Z2=ZZ_1=Z_2=ZZ1=Z2=Z);
-
计算两点在相机坐标系中的三维坐标:
(X1,Y1,Z1)=(Z1⋅u1−u0fx,Z1⋅v1−v0fy,Z1)(X_1, Y_1, Z_1) = \left( Z_1 \cdot \frac{u_1 - u_0}{f_x}, \quad Z_1 \cdot \frac{v_1 - v_0}{f_y}, \quad Z_1 \right)(X1,Y1,Z1)=(Z1⋅fxu1−u0,Z1⋅fyv1−v0,Z1)
(X2,Y2,Z2)=(Z2⋅u2−u0fx,Z2⋅v2−v0fy,Z2)(X_2, Y_2, Z_2) = \left( Z_2 \cdot \frac{u_2 - u_0}{f_x}, \quad Z_2 \cdot \frac{v_2 - v_0}{f_y}, \quad Z_2 \right)(X2,Y2,Z2)=(Z2⋅fxu2−u0,Z2⋅fyv2−v0,Z2) -
两点间的物理距离(三维欧氏距离)为:
D=(X2−X1)2+(Y2−Y1)2+(Z2−Z1)2D = \sqrt{(X_2 - X_1)^2 + (Y_2 - Y_1)^2 + (Z_2 - Z_1)^2}D=(X2−X1)2+(Y2−Y1)2+(Z2−Z1)2若两点在同一深度平面(Z1=Z2=ZZ_1=Z_2=ZZ1=Z2=Z),则简化为二维距离:
D=(Z⋅u2−u1fx)2+(Z⋅v2−v1fy)2D = \sqrt{\left( Z \cdot \frac{u_2 - u_1}{f_x} \right)^2 + \left( Z \cdot \frac{v_2 - v_1}{f_y} \right)^2}D=(Z⋅fxu2−u1)2+(Z⋅fyv2−v1)2
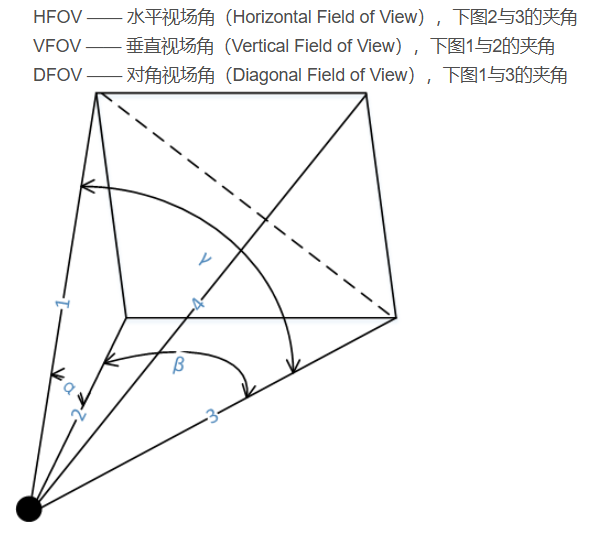
视场角(FOV)
1. 基础定义
- 视场角(FOV):相机能够捕捉到的视野范围,通常分为水平视场角(θₕ) 和垂直视场角(θᵥ),单位为角度(°)或弧度(rad)。例如,水平视场角60°表示相机在水平方向能覆盖从光轴向左30°到向右30°的范围。
- 像素(Pixel):图像的最小离散单位,通常用图像的水平像素数(W,如1920) 和垂直像素数(H,如1080) 描述图像尺寸(如1920×1080)。
2. 核心关系:角度分辨率
视场角和像素的直接关系体现为**“每个像素对应的角度”(即角度分辨率**),它描述了“图像中1个像素的变化对应实际场景中多大的角度范围”。
公式:像素对应的角度分辨率
对于水平方向:
水平角度分辨率=水平视场角(θh)水平像素数(W)\text{水平角度分辨率} = \frac{\text{水平视场角}(θₕ)}{\text{水平像素数}(W)}水平角度分辨率=水平像素数(W)水平视场角(θh)
(单位:度/像素 或 弧度/像素)
对于垂直方向:
垂直角度分辨率=垂直视场角(θv)垂直像素数(H)\text{垂直角度分辨率} = \frac{\text{垂直视场角}(θᵥ)}{\text{垂直像素数}(H)}垂直角度分辨率=垂直像素数(H)垂直视场角(θv)
3. 物理意义:从角度到空间尺度的转换
角度分辨率仅描述了像素与角度的对应关系,若结合相机到目标的距离(depth),可进一步将“像素”转换为“实际物理尺寸”(如米、厘米),这也是视场角与像素在实际应用中的核心价值。
以水平方向为例:
-
已知水平视场角θₕ,相机到目标的距离为
depth,则相机在水平方向能覆盖的实际物理宽度(Lₕ) 为:
Lh=2⋅depth⋅tan(θh2)Lₕ = 2 \cdot depth \cdot \tan\left(\frac{θₕ}{2}\right)Lh=2⋅depth⋅tan(2θh)
(原理:视场角对称分布在光轴两侧,通过三角函数将角度转换为线性距离) -
图像水平像素数为W,则每个水平像素对应的实际物理长度(ΔLₕ) 为:
ΔLh=LhW=2⋅depth⋅tan(θh2)WΔLₕ = \frac{Lₕ}{W} = \frac{2 \cdot depth \cdot \tan\left(\frac{θₕ}{2}\right)}{W}ΔLh=WLh=W2⋅depth⋅tan(2θh)
下面是通过视场角算出像素图对应实际物理尺寸Ground Pixel Area的C++代码
double GPA(double depth, int img_view_rows, int img_view_cols)
{double length = depth * tan(theta_length) * 2 / img_view_cols;double width = depth * tan(theta_width) * 2 / img_view_rows;return length * width;
}
4. 视场角(FOV)与内参的关联:无内参时的替代方案
若未获取相机内参,可通过视场角(FOV)推导转换关系。视场角是相机可观测的角度范围(水平HFOV、垂直VFOV),与内参的关系为:
tan(HFOV2)=(W/2−u0)⋅pxf=W/2−u0fx(假设主点在中心,u0=W/2)\tan\left( \frac{HFOV}{2} \right) = \frac{(W/2 - u_0) \cdot p_x}{f} = \frac{W/2 - u_0}{f_x} \quad (\text{假设主点在中心,}u_0=W/2)tan(2HFOV)=f(W/2−u0)⋅px=fxW/2−u0(假设主点在中心,u0=W/2)
简化得(主点居中时):
fx=W/2tan(HFOV/2),fy=H/2tan(VFOV/2)f_x = \frac{W/2}{\tan(HFOV/2)}, \quad f_y = \frac{H/2}{\tan(VFOV/2)}fx=tan(HFOV/2)W/2,fy=tan(VFOV/2)H/2
将其代入物理尺寸公式,可得基于FOV的转换公式:
-
水平方向1像素对应的物理尺寸(当深度为Z时):
px_phys=X2−X1u2−u1=Zfx=2Z⋅tan(HFOV/2)Wp_{x\_phys} = \frac{X_2 - X_1}{u_2 - u_1} = \frac{Z}{f_x} = \frac{2Z \cdot \tan(HFOV/2)}{W}px_phys=u2−u1X2−X1=fxZ=W2Z⋅tan(HFOV/2) -
垂直方向1像素对应的物理尺寸:
py_phys=2Z⋅tan(VFOV/2)Hp_{y\_phys} = \frac{2Z \cdot \tan(VFOV/2)}{H}py_phys=H2Z⋅tan(VFOV/2)因此,若目标在图像中占据Δu=∣u2−u1∣\Delta u = |u_2 - u_1|Δu=∣u2−u1∣像素(水平)和Δv=∣v2−v1∣\Delta v = |v_2 - v_1|Δv=∣v2−v1∣像素(垂直),其物理尺寸为:
物理宽度=Δu⋅px_phys=Δu⋅2Z⋅tan(HFOV/2)W\text{物理宽度} = \Delta u \cdot p_{x\_phys} = \Delta u \cdot \frac{2Z \cdot \tan(HFOV/2)}{W}物理宽度=Δu⋅px_phys=Δu⋅W2Z⋅tan(HFOV/2)
物理高度=Δv⋅py_phys=Δv⋅2Z⋅tan(VFOV/2)H\text{物理高度} = \Delta v \cdot p_{y\_phys} = \Delta v \cdot \frac{2Z \cdot \tan(VFOV/2)}{H}物理高度=Δv⋅py_phys=Δv⋅H2Z⋅tan(VFOV/2)
三、关键细节:影响转换精度的核心因素
实际应用中,转换精度受多种因素影响,需针对性处理以避免误差累积。
1. 畸变校正:消除镜头“失真”
相机镜头存在光学畸变(径向畸变、切向畸变),导致像素坐标与理想位置偏移,若不校正会直接影响转换精度。
-
径向畸变:由镜头曲率导致,表现为“桶形畸变”(边缘像素向外偏移)或“枕形畸变”(边缘像素向内偏移),校正公式为:
xcorrected=x⋅(1+k1r2+k2r4+k3r6),ycorrected=y⋅(1+k1r2+k2r4+k3r6)x_{\text{corrected}} = x \cdot (1 + k_1 r^2 + k_2 r^4 + k_3 r^6), \quad y_{\text{corrected}} = y \cdot (1 + k_1 r^2 + k_2 r^4 + k_3 r^6)xcorrected=x⋅(1+k1r2+k2r4+k3r6),ycorrected=y⋅(1+k1r2+k2r4+k3r6)
其中r2=x2+y2r^2 = x^2 + y^2r2=x2+y2,k1、k2、k3k_1、k_2、k_3k1、k2、k3为径向畸变系数。 -
切向畸变:由镜头装配偏差导致,校正公式为:
xcorrected=x+2p1xy+p2(r2+2x2),ycorrected=y+p1(r2+2y2)+2p2xyx_{\text{corrected}} = x + 2p_1 xy + p_2 (r^2 + 2x^2), \quad y_{\text{corrected}} = y + p_1 (r^2 + 2y^2) + 2p_2 xyxcorrected=x+2p1xy+p2(r2+2x2),ycorrected=y+p1(r2+2y2)+2p2xy
其中p1、p2p_1、p_2p1、p2为切向畸变系数。校正步骤:先通过畸变系数将像素坐标(u, v)转换为无畸变的理想坐标(uundistort,vundistortu_{\text{undistort}}, v_{\text{undistort}}uundistort,vundistort),再代入转换公式。
2. 深度信息的可靠性:精度的“基石”
深度值ZZZ的准确性直接决定物理尺寸精度,需注意以下问题:
- 深度噪声:TOF相机受多路径反射影响,结构光相机受环境光干扰,双目相机受纹理缺失影响,均会导致深度值波动(如±5%的误差)。需通过滤波(中值滤波、高斯滤波)或多帧融合降低噪声。
- 深度分辨率:深度图的分辨率通常低于彩色图(如1280×720彩色图对应640×360深度图),需通过像素对齐(如插值)确保像素-深度对应关系准确。
- 深度单位:不同相机的深度单位不同(如Intel RealSense的深度图单位为毫米,Azure Kinect为米),转换前需统一单位(如将毫米转换为米)。
3. 像素的“非正方形”特性:宽高比的影响
部分相机的像素并非正方形(如工业相机的像素宽高比为4:3),此时fx/fy≠W/Hf_x / f_y \neq W / Hfx/fy=W/H,导致水平和垂直方向的1像素物理尺寸不同(px_phys≠py_physp_{x\_phys} \neq p_{y\_phys}px_phys=py_phys)。若误用正方形像素假设(px=pyp_x = p_ypx=py),会引入2%-5%的误差。
判断方法:通过内参计算宽高比r=(fx/W)/(fy/H)r = (f_x / W) / (f_y / H)r=(fx/W)/(fy/H),若r≠1r \neq 1r=1,则为非正方形像素,需分别计算水平和垂直方向的物理尺寸。
4. 目标平面与像平面的夹角:倾斜场景的处理
当目标平面与相机像平面不平行(如倾斜的桌面),不同像素的深度值ZZZ不同,此时不能用平均深度近似,需逐像素计算三维坐标后再求物理尺寸。例如:
- 倾斜平面上两点的深度分别为Z1=1.0mZ_1=1.0mZ1=1.0m和Z2=1.2mZ_2=1.2mZ2=1.2m,若直接用平均深度Z=1.1mZ=1.1mZ=1.1m计算,可能导致5%以上的误差;
- 正确做法:分别用Z1、Z2Z_1、Z_2Z1、Z2计算两点的(X1,Y1)和(X2,Y2),再通过三维距离公式计算物理距离。
四、实际应用:从参数获取到误差验证
1. 核心参数的获取途径
- 内参与畸变系数:通过相机厂商提供的校准文件(如Intel RealSense的json文件)获取;或使用OpenCV的
calibrateCamera函数自行标定(需打印棋盘格,拍摄10-20张不同角度的图像);或者用ROS2来标定。 - 视场角(FOV):厂商规格书通常会标注(如HFOV=90°,VFOV=70°);也可通过内参反推:HFOV=2⋅arctan(W/(2fx))HFOV = 2 \cdot \arctan(W/(2f_x))HFOV=2⋅arctan(W/(2fx))。
- 深度图:通过相机SDK获取(如
realsense2库的depth_frame,k4a库的k4a_image_get_buffer)。
2. 步骤示例:测量一本书的物理尺寸
假设使用Intel RealSense D435i相机,参数如下:
- 分辨率:W=640像素,H=480像素;
- 内参:fx=615f_x=615fx=615像素,fy=615f_y=615fy=615像素,u0=320u_0=320u0=320,v0=240v_0=240v0=240;
- 书本在图像中的像素坐标:左上角(100, 100),右下角(500, 300),深度值Z=1.0mZ=1.0mZ=1.0m(平面与相机平行)。
计算步骤:
- 计算像素差:Δu=500−100=400\Delta u = 500 - 100 = 400Δu=500−100=400像素,Δv=300−100=200\Delta v = 300 - 100 = 200Δv=300−100=200像素;
- 计算物理宽度:
宽度=Z⋅Δufx=1.0⋅400615≈0.650m=650mm\text{宽度} = Z \cdot \frac{\Delta u}{f_x} = 1.0 \cdot \frac{400}{615} \approx 0.650m = 650mm宽度=Z⋅fxΔu=1.0⋅615400≈0.650m=650mm - 计算物理高度:
高度=Z⋅Δvfy=1.0⋅200615≈0.325m=325mm\text{高度} = Z \cdot \frac{\Delta v}{f_y} = 1.0 \cdot \frac{200}{615} \approx 0.325m = 325mm高度=Z⋅fyΔv=1.0⋅615200≈0.325m=325mm - 验证:用尺子实际测量书本尺寸为645mm×320mm,误差约0.8%(在合理范围内)。
3. 误差来源与优化方案
实际转换中常见误差及解决方法:
| 误差来源 | 误差占比 | 优化方案 |
|---|---|---|
| 深度值误差 | 40%-50% | 多帧平均、滤波算法、避开强反射区域 |
| 畸变未校正 | 15%-20% | 用相机校准工具获取畸变系数并校正 |
| 内参不准确 | 10%-15% | 重新标定(使用高精度棋盘格) |
| 像素-深度对齐偏差 | 5%-10% | 用相机SDK提供的对齐功能(如RealSense的align函数) |
| 非平面目标 | 5%-10% | 用三维点云直接计算物理尺寸 |
五、扩展应用:从物理尺寸到三维重建
像素-物理尺寸转换的终极目标是构建三维模型,以下是典型扩展场景:
- 体积计算:通过获取物体表面多个点的三维坐标,用泊松重建算法生成三维网格,再计算网格体积;
- 位姿估计:通过物体特征点的像素坐标与物理尺寸,反推物体在世界坐标系中的位置(x, y, z)和姿态(旋转角);
- 机器人抓取:将目标物体的像素尺寸转换为物理尺寸后,规划机械臂的抓取范围(如抓取一个10cm×5cm的盒子,需确保夹爪开度≥10cm)。