FOC算法中SIMULINK一些常用模块(2)-Permanent Magnet Synchronous Machine模块
一,介绍
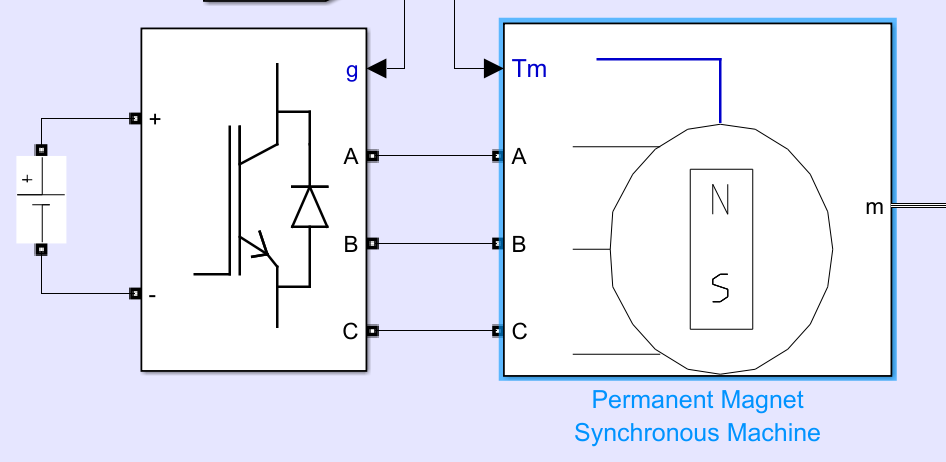
这三个模块一起介绍了,由左到右,分别是电源模块,驱动模块和电机模块。主要介绍一下电机模块
二,DC Voltage Source
DC Voltage Source 模块是用于表示直流电压源的基本组件,可以提供恒流直压,这个没什么好说的,就是一个直流电源,其中参数如下:
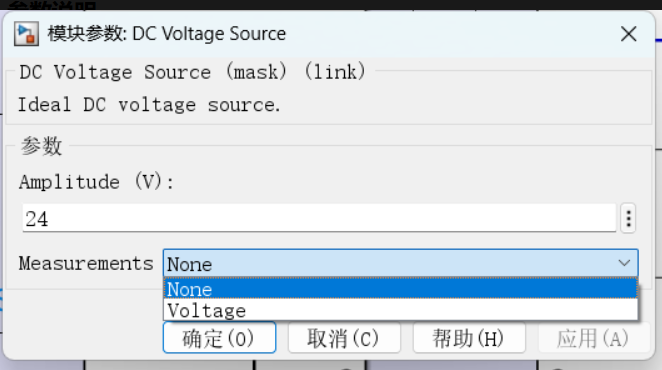
Amplitude (V):幅值,用于设置直流电压源输出的电压大小,单位是伏特(V) 。你截图中设置为 24,表示该直流电压源输出的直流电压幅值为 24V。通过修改这个参数,可以调整输出电压,满足不同的电路仿真需求,比如模拟不同电压等级的电池或电源设备。
Measurements:测量选项,用于选择是否对直流电压源的某些电气量进行测量并输出测量信号。它有以下两个选项:
None:不进行任何测量,不输出测量信号。当你只是需要该电压源为电路供电,不需要获取其相关电气量的测量值时,可以选择此选项。
Voltage:测量直流电压源输出的电压,并输出测量信号。这个测量信号可以连接到示波器(Scope)等显示模块,方便在仿真过程中实时观察直流电压源输出电压的波形和数值,也可以连接到其他需要电压信号作为输入的模块,用于进一步的信号处理或控制算法的实现。
三,Universal Bridge
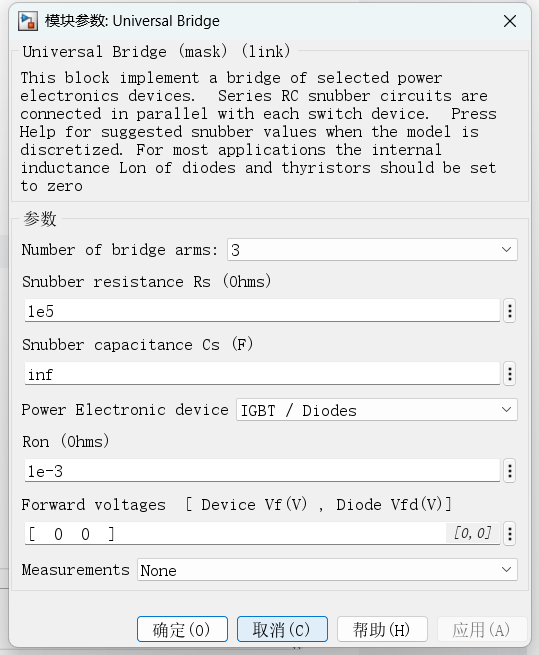
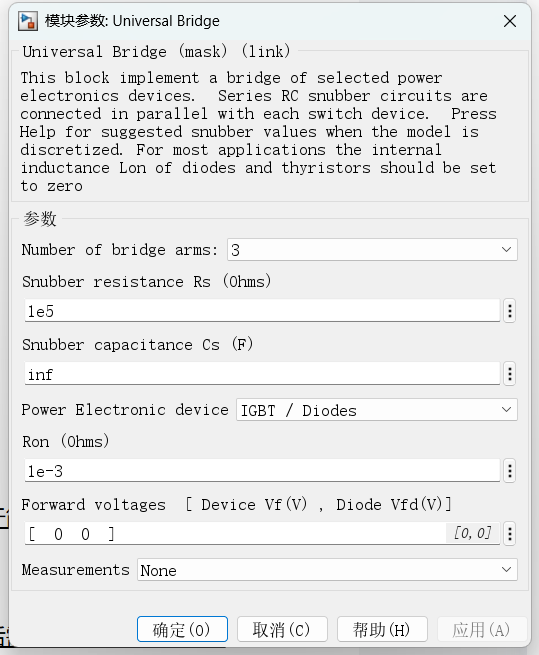
Universal Bridge(通用桥) 模块用于实现电力电子变流桥(如整流桥、逆变桥等,这个稍做一下介绍:
一. Number of bridge arms(桥臂数量)
含义:设置变流桥的桥臂数目,决定拓扑结构(如 3 表示三相桥,2 表示单相桥)。
典型场景:
三相逆变 / 整流 → 选
3(如三相全桥电路);单相整流 / 逆变 → 选
2(如单相全桥、半桥)。
二. Snubber resistance Rs(缓冲电阻)
含义:为每个功率器件并联的 RC 缓冲电路 中的电阻值,用于抑制开关过程中的电压尖峰(吸收浪涌能量)。
取值逻辑:
若无需缓冲电路 → 设为
inf(或极大值,等效断开电阻);需抑制尖峰时 → 按实际缓冲电路设计取值(如
1e5欧姆,需配合电容Cs共同作用)。
三. Snubber capacitance Cs(缓冲电容)
含义:RC 缓冲电路中的电容值,与
Rs配合抑制电压尖峰,减少器件开关损耗。取值逻辑:
无需缓冲 → 设为
inf(等效断开电容);需抑制尖峰时 → 按设计取值(如几 nF~μF,需与
Rs匹配)。
四. Power Electronic device(功率器件类型)
1. Diodes(二极管)
- 特性:不可控器件,仅单向导通,无主动开关能力。
- 应用:
- 纯整流场景(如不可控整流桥),无需触发信号;
- 作为续流二极管(但此选项下整个桥臂都是二极管,一般用于简单整流)。
2. Thyristors(晶闸管 / 可控硅)
- 特性:半控型器件,需触发脉冲(门极信号)才能导通,且导通后需电流过零才能关断。
- 应用:
- 相控整流 / 逆变(如三相可控整流桥),通过调整触发角(α)控制输出;
- 高压大功率场景(如高压直流输电、电机软启动)。
3. GTO / Diodes(门极关断晶闸管)
- 特性:全控型器件,通过门极信号主动关断(无需等待电流过零),但开关速度较慢、损耗较高。
- 应用:
- 中大功率变流(如传统 SVG、电机驱动);
- 需主动关断但对开关频率要求不高的场景。
4. MOSFET / Diodes(MOSFET)
- 特性:全控型器件,开关速度极快(适合高频),但耐压 / 电流能力较低。
- 应用:
- 高频小功率场景(如 DC-DC 变换器、小功率逆变器);
- 需高频开关的电力电子电路(如谐振变换、开关电源)。
5. IGBT / Diodes(IGBT)
- 特性:全控型器件,兼具 MOSFET 的高频特性和 GTO 的高耐压 / 电流能力,是最常用的电力电子开关。
- 应用:
- 三相逆变(如电机驱动、光伏逆变器);
- 中大功率变流(如风电变流器、工业电源);
- 绝大多数电力电子仿真的 “默认选择”(平衡了性能与实用性)。
6. Ideal Switches(理想开关)
- 特性:无损耗、无延迟的理想器件,导通电阻为 0,开关瞬间完成。
- 应用:
- 理论验证、快速原型设计(忽略器件损耗和开关延迟,简化仿真);
- 需 “纯理想” 拓扑验证的场景(如教学演示、算法快速验证)。
7. Switching-function based VSC(基于开关函数的电压源换流器)
- 特性:通过开关函数抽象化变流桥行为,不关注单个器件细节,直接输出变流桥的电压 / 电流特性。
- 应用:
- 大规模电力系统仿真(如电网级换流站,无需器件级细节);
- 快速计算变流桥的宏观特性(忽略器件损耗和开关过程)。
8. Average-model based VSC(平均模型换流器)
- 特性:基于平均模型简化变流桥,用连续方程描述开关周期内的平均行为,兼顾精度与仿真速度。
- 应用:
- 电力电子系统级仿真(如含变流器的电网、电机驱动系统);
- 需平衡仿真精度和速度的场景(比器件级快,比理想模型准)。
五. Ron(器件导通电阻)
含义:功率器件导通时的等效电阻(模拟实际器件的导通损耗)。
取值逻辑:
理想器件 → 设为
0;实际仿真 → 按器件手册取值(如 IGBT 导通电阻可能为
1e-3~1e-2欧姆)。
六. Forward voltages(正向压降)
格式:
[Device Vf, Diode Vfd],分别设置主动器件和续流二极管的正向导通压降。含义:模拟实际器件导通时的电压损耗(如 IGBT、二极管的正向压降)。
取值逻辑:
理想器件 → 设为
[0 0];实际仿真 → 按器件手册取值(如二极管正向压降约
0.7V,可设[0.7 0.7],具体看器件类型)。
七. Measurements(测量输出)
含义:选择是否输出桥模块的电气量测量信号(如电压、电流),方便连接示波器或其他分析模块。
常见选项:
None:不输出测量信号;
Voltages:输出桥臂电压、器件电压等;
Currents:输出桥臂电流、器件电流等;
All:输出全部电压、电流测量信号。
四,Permanent Magnet Synchronous Machine
Permanent Magnet Synchronous Machine(永磁同步电机,简称 PMSM )模块用于模拟三相或五相永磁同步电机的电气、机械特性,可在电机控制系统仿真(如电动汽车驱动、工业伺服系统等场景 )中,与逆变器、控制器等模块配合,搭建完整的电机驱动系统模型,分析电机的运行状态(转速、转矩、电流、电压等)。
一,configruation(配置)
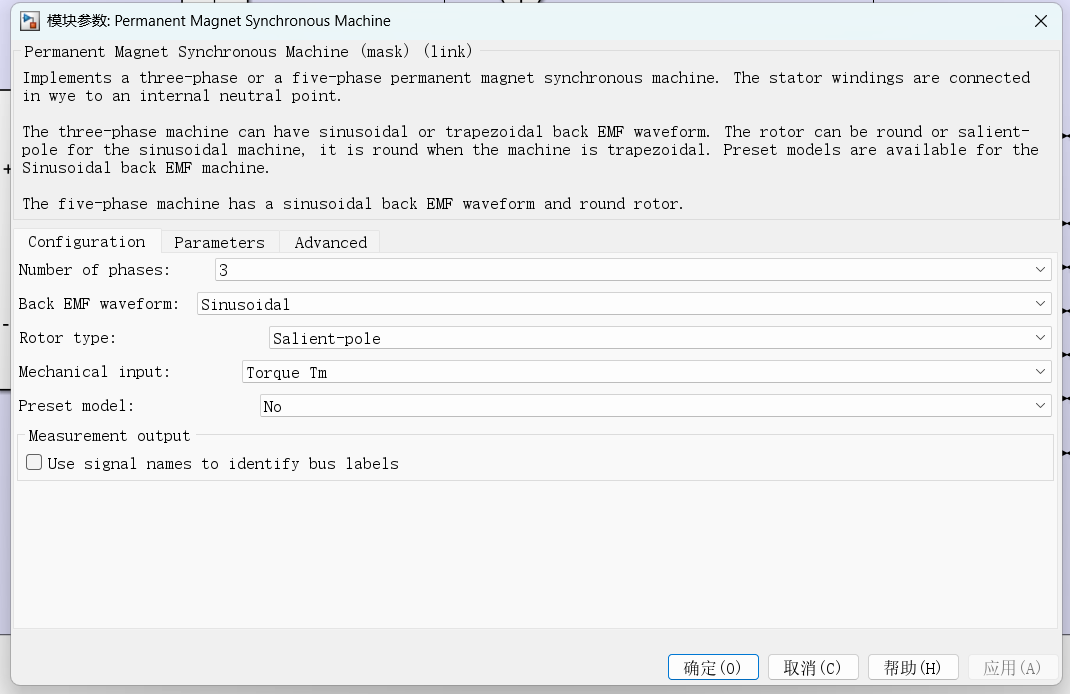
1. Number of phases(相数)
含义:设置永磁同步电机的定子绕组相数,可选
3(三相)或5(五相 )。应用场景:
三相是工业和电动汽车等领域最常用的电机形式,选
3可模拟常规三相永磁同步电机;若研究五相电机的特殊性能(如容错性、谐波特性等 ),可选择
5。
2. Back EMF waveform(反电动势波形)
含义:定义电机转子永磁体产生的反电动势(Back Electromotive Force,反电动势 )的波形类型,可选
Sinusoidal(正弦波 )或Trapezoidal(梯形波 )。区别与应用:
Sinusoidal(正弦波):三相永磁同步电机主流类型,反电动势接近正弦曲线,电机运行平稳、谐波少,常用于高精度控制场景(如工业伺服、电动汽车驱动 );
Trapezoidal(梯形波):类似无刷直流电机(BLDC)的反电动势特性,转矩输出有一定脉动,适用于对控制复杂度要求稍低、成本敏感的简单调速场景 。
3. Rotor type(转子类型)
含义:设置永磁同步电机转子的结构类型,与
Back EMF waveform关联,当反电动势为Sinusoidal时,可选Salient - pole(凸极 )或Round(隐极,也叫圆桶形 );若反电动势为Trapezoidal,转子固定为Round类型 。区别:
Salient - pole(凸极):转子磁极突出,直轴(d 轴)和交轴(q 轴)磁路磁阻不同,存在凸极效应,可利用磁阻转矩辅助输出,在一些需要高转矩密度设计中应用;
Round(隐极):转子结构相对均匀,直轴和交轴电感近似相等,电机数学模型更简单,控制相对容易,广泛用于各类正弦波永磁同步电机场景 。
4. Mechanical input(机械输入)
含义:指定电机机械端口的输入物理量类型,常见选项有
Torque Tm(转矩输入 )和Speed omega(转速输入 )等(不同版本界面可能略有差异,但核心逻辑一致 )。应用:
选
Torque Tm:电机机械端口输入转矩信号,可模拟负载对电机的作用(如电动汽车行驶时路面阻力转化的负载转矩输入 ),电机输出转速等状态;选
Speed omega:电机机械端口输入转速信号,可用于模拟电机被拖动的工况(如启动过程中变频器逐步给定转速,或电机作为发电机被原动机拖动 )。
5. Preset model(预设模型)
含义:是否使用 Simulink 提供的预设电机参数模型,可选
No(自定义参数 )或对应预设(如一些典型电机参数模板 )。应用:
选
No:需手动在后续Parameters标签页填写电机具体参数(如定子电阻、电感、永磁体磁链等 ),适合精准模拟实际电机;若选预设模型,模块会加载一套默认典型参数,可快速搭建仿真模型进行初步验证,但可能与实际电机特性有差异 。
6. Measurement output(测量输出辅助)
Use signal names to identify bus labels:勾选后,电机测量输出的总线信号(如转速、转矩、电流等复合信号 )会用更清晰的信号名称标识总线标签,方便在模型中识别和连接信号,提升模型可读性,尤其在复杂系统仿真中作用明显 。
二,parameters(机械参数配置)
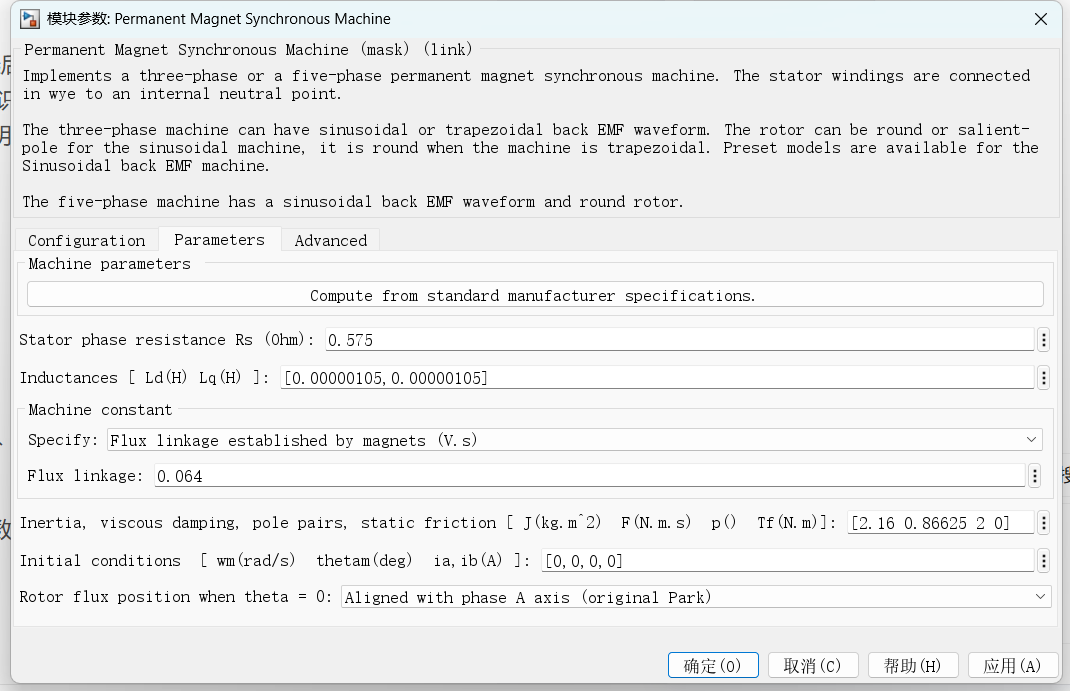
1. Compute from standard manufacturer specifications
含义:是否基于电机厂商的标准参数(如额定功率、额定电压等)自动计算电机模型参数。
逻辑:
勾选后,需填写电机的 额定参数(如额定功率、电压、转速等 ),模块会自动推导
Rs、Ld、Lq、磁链等参数;取消勾选(如你的截图),则手动填写所有参数(适合已知电机等效电路参数的场景)。
2. Stator phase resistance Rs (Ohm)
含义:定子绕组每相的电阻(模拟铜损)。
取值:
由电机设计或实验测得(如你的截图中
0.575 Ohm);对高频电机可忽略,但低速 / 大电流场景需准确设置(影响铜损和启动特性)。
3. Inductances [ Ld(H) Lq(H) ]
含义:直轴电感和交轴电感,描述电机定子绕组的电感特性:
L_d:直轴(d 轴,与永磁体磁场同向)电感;
L_q:交轴(q 轴,与永磁体磁场垂直)电感。
4. Machine constant
(1) Specify
选项:
Flux linkage established by magnets (V.s)或Torque constant (N.m/A)。作用:选择电机常数的定义方式(磁链或转矩常数,两者可通过极对数换算)。
(2) Flux linkage
含义:永磁体在定子绕组中产生的磁链,单位
V.s(韦伯,\(1 V.s = 1 Wb\) )。影响:直接决定电机的反电动势和电磁转矩
取值:由永磁体材料和电机设计决定(如你的截图中
0.064 V.s)。
5. Inertia, viscous damping, pole pairs, static friction
格式:[ J(kg.m^2) F(N.m.s) p() Tf(N.m) ]
J (Inertia,转动惯量):电机转子的转动惯量,影响电机的动态响应(如加减速时间)。
F (Viscous damping,粘滞阻尼):与转速成正比的阻尼转矩系数,模拟轴承摩擦等线性阻尼。
p (Pole pairs,极对数):电机转子的极对数(永磁体 N/S 极对数),决定电机同步转速,f 为电频率 )。
Tf (Static friction,静摩擦转矩):电机静止或低速时的摩擦转矩(超过阈值后不再作用)。
6. Initial conditions [ wm(rad/s) thetam(deg) ia,ib(A) ]
含义:仿真初始时刻的电机状态:
wm:初始机械角速度(如0表示启动前静止);thetam:初始转子位置(电角度,0表示转子 d 轴与 A 相绕组对齐 );ia,ib:初始定子 A、B 相电流(0表示启动前无电流 )。
7. Rotor flux position when theta = 0
选项:
Aligned with phase A axis (original Park)。含义:定义仿真初始时刻转子永磁体磁链的位置:
选此选项时,转子 d 轴与定子 A 相绕组轴线对齐,符合 Park 变换 的经典定义(简化坐标变换的初始条件)。
三,Aadvanced
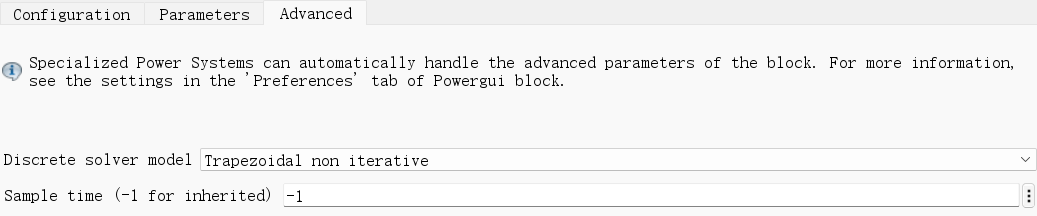
1. Discrete solver model(离散求解器模型)
选项:
Trapezoidal non iterative(梯形非迭代法 )。作用:
定义电机模型在离散仿真模式下的数值求解算法。Trapezoidal(梯形法 ):基于梯形积分,精度较高,是电力电子仿真的常用方法;non iterative(非迭代 ):简化计算,避免迭代过程,适合对仿真速度要求高的场景。
2. Sample time (-1 for inherited)(采样时间)
值:
-1(表示继承上级采样时间 )。作用:
设置电机模型的离散化采样时间:>0:强制模型以指定时间步长(如1e-5s )离散化;-1:继承上级模块(如 Powergui 或仿真配置)的采样时间,适合与系统全局步长保持一致。