为何前馈3DGS的边界总是“一碰就碎”?PM-Loss用“3D几何先验”来解
文章链接: https://arxiv.org/abs/2506.05327
项目主页: https://aim-uofa.github.io/PMLoss
代码链接: https://github.com/aim-uofa/PM-Loss
在新视角合成(Novel View Synthesis, NVS)技术飞速发展的今天,3D高斯泼溅(3D Gaussian Splatting, 3DGS)以其出色的实时渲染能力和照片级的视觉效果,成为了该领域的主流技术。为了摆脱传统3DGS“逐场景优化”的束缚,前馈式(Feed-forward)3DGS应运而生,它仅需一次网络推理即可完成场景重建,极大地提升了应用效率。
然而,一个长期存在但常被忽视的问题,正制约着前馈式3DGS的质量上限:
几何表示的局限性。当前模型普遍依赖预测的2D深度图反投影来构建三维高斯点云。但深度图在物体边界处存在天然的不连续性,这种瑕疵在被上投影至三维空间时会被放大,导致生成的几何体在边缘区域出现破碎、空洞和漂浮物,严重影响了最终的渲染质量。
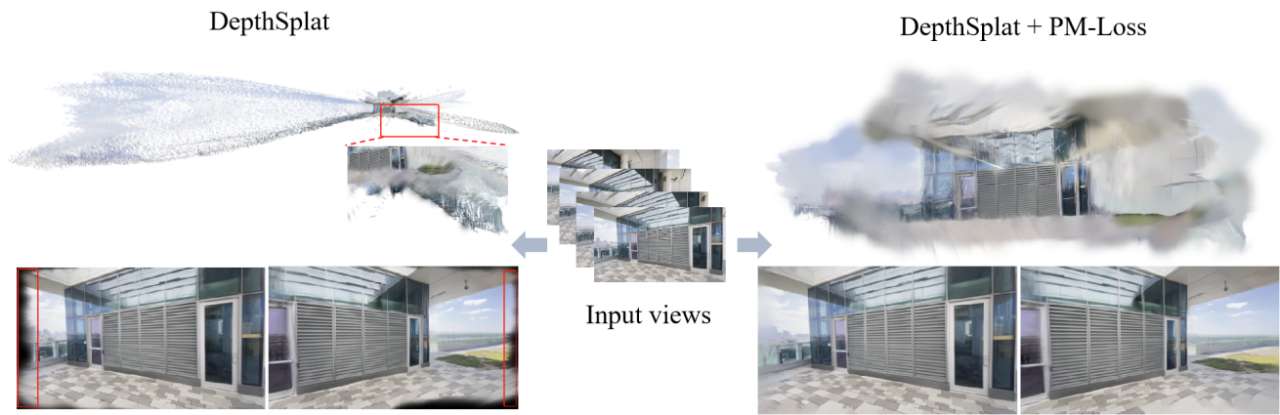
为了攻克这一难题,本文提出了 PM-Loss,一种新颖的、即插即用的正则化损失。它巧妙地利用了大型3D重建模型生成的“点图”(Pointmap)作为几何先验,在训练过程中直接对三维空间中的几何进行约束,从根本上提升了模型的几何准确性。实验表明,MVSplat 和 DepthSplat 等主流模型在应用 PM-Loss 后,在 DL3DV 和 RealEstate10K 数据集上重建出的高斯点云基本消除了外围浮点。同时在渲染效果上也取得了超过 2dB 的PSNR提升 ,点云在边界区域可视化效果变得明显更加清晰和规整 。
核心症结:不完美的“深度基石”
深入探究前馈式3DGS的工作流程,我们发现其核心瓶颈在于几何重建的监督方式。模型通过标准的2D渲染损失(如L2, LPIPS)进行优化,这种监督方式虽然能保证整体画面的相似性,却难以对三维空间的几何结构进行有效约束。 这导致了两个主要问题:
1.边界伪影 (Boundary Artifacts):深度图在物体轮廓、前景与背景交界处极易产生错误预测,这些错误被直接转化为三维空间中位置不准的高斯点。
2.几何不一致 (Geometric Inconsistency):仅依赖2D图像监督,模型难以学习到多视图之间连贯、一致的几何信息,导致三维结构缺乏平滑性和完整性。
这种基于不完美“深度基石”的重建方式,是导致渲染结果出现视觉瑕疵的根本原因。
PM-Loss登场:引入3D空间“几何标尺”
为了解决上述问题,本文不再局限于2D图像空间,而是引入了直接的3D几何监督。PM-Loss的核心思想是:借助一个强大的外部“几何专家”来指导3DGS模型的几何学习。
这个“专家”就是由预训练的大型3D重建模型(如VGGT)生成的点图(Pointmap)。点图为场景中的每个像素点直接提供了三维世界坐标,相比于单一的深度值,它包含了更丰富、更平滑的几何信息。
PM-Loss的工作流程可概括为以下两步:
1.高效对齐 (Efficient Alignment) :在训练的每一步,将3DGS模型预测的高斯点云中心,与由点图构成的目标点云进行对齐。得益于两者像素级别的天然对应关系,可采用高效的Umeyama算法在毫秒间完成对齐,避免了传统ICP等算法的巨大开销。
2.3D空间正则化 (3D-Space Regularization) :对齐后,通过Chamfer距离计算两个点云之间的差异,并将其作为一项正则化损失(即PM-Loss)加入到总损失函数中。这相当于在三维空间中引入了一把“几何标尺”,惩罚那些偏离了平滑几何先验的预测,引导模型学习到更准确、更完整的3D结构。
作为一个纯粹的训练期损失,PM-Loss无需修改模型架构,且在推理时零开销,保证了原有模型的效率。
实测效果:边界更清晰,伪影去无踪
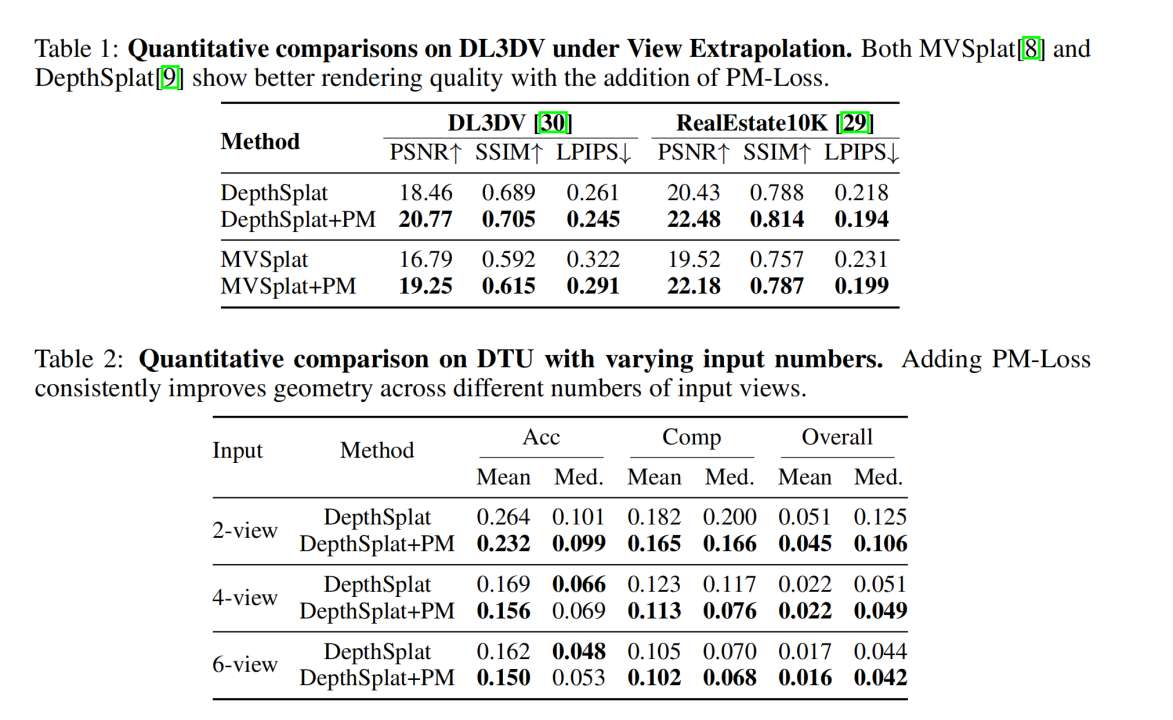
本文在多个主流前馈3DGS模型(如DepthSplat, MVSplat)及大规模数据集(DL3DV, RealEstate10K)上验证了PM-Loss的有效性。

-
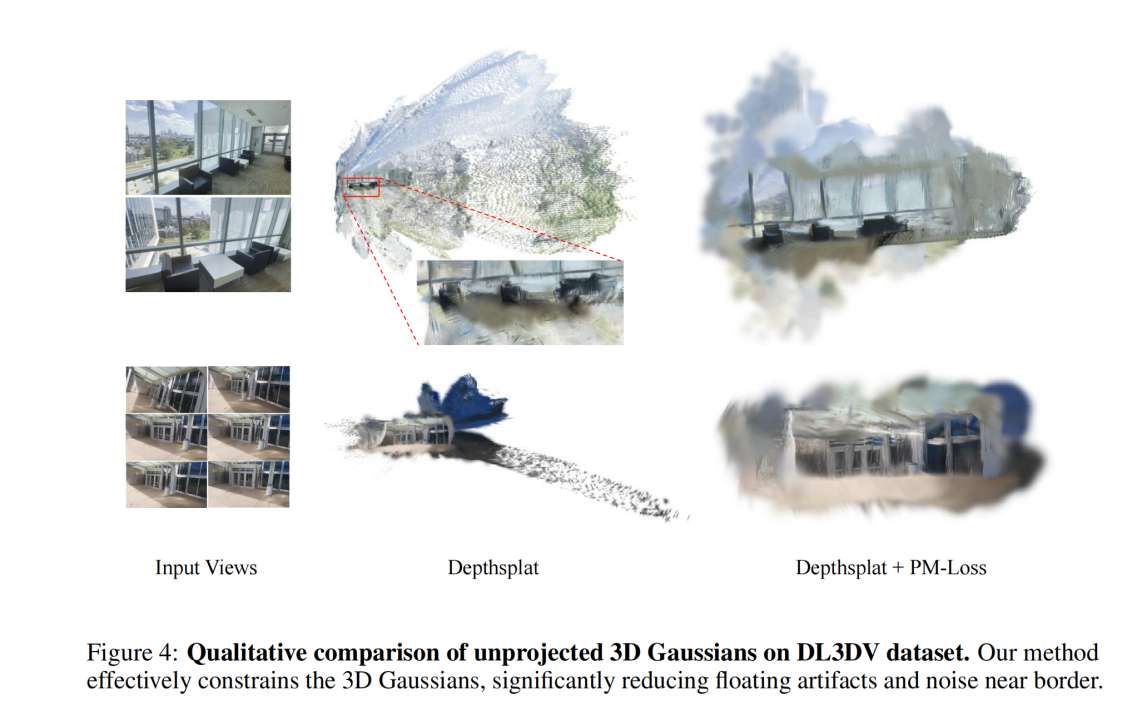
几何质量的根本性优化:通过可视化3D高斯点云,发现PM-Loss能显著提升几何体的规整度和完整性,使其更贴近真实的场景结构。
-
渲染质量显著提升:PM-Loss为所有基线模型带来了稳定且可观的性能增益。在同样设置下,PSNR指标平均提升超过2dB,LPIPS和SSIM指标也得到了一致改善。
-
视觉效果肉眼可见的改善:从定性对比中可以清晰看到,经PM-Loss优化后的模型,在处理物体边缘、复杂遮挡和背景区域时表现得更加出色。原先的黑色空洞、扭曲边界和漂浮噪点得到了有效抑制,整体画面更干净、更真实。
总结
研究指出了当前前馈式3DGS模型中一个关键却未被充分解决的问题:由2D深度表示局限性所引发的几何质量瓶颈。本文提出的PM-Loss,通过一种巧妙而高效的方式,将大型3D重建模型的几何先验知识“蒸馏”到3DGS模型的训练过程中。作为一个轻量级、即插即用且无推理开销的正则化损失,PM-Loss为提升前馈式3DGS的重建质量提供了一个实用且有效的解决方案。我们相信,这种跨模型、跨范式借鉴先验知识的思路,将为未来的三维视觉研究带来更多启发。
参考文献
[1] Revisiting Depth Representations for Feed-Forward 3D Gaussian Splatting