2018年MathorCup数学建模A题矿相特征迁移规律研究解题全过程文档及程序
2018年第八届MathorCup高校数学建模挑战赛
A题 矿相特征迁移规律研究
原题再现:
背景材料:
球团矿具有含铁品位高、粒度均匀、还原性能好、机械强度高、微气孔多等特性, 是高炉炼铁的重要原料之一。近年来国内外普遍认识到球团矿高温状态下冶金性能是评价炉料质量的重要指标, 而球团矿冶金性能 ( N碱度” 是一个重要指标) 与其微观结构密切相关。基于球团矿冶金性能决定其微观结构, 微观结构反映其冶金性能的角度出发, 探索球团矿不同位置的矿相特征, 并建立矿相特征与碱度之间的关系, 对球团矿实际生产有重要的指导意义。
如图 1 所示, 球团矿不同的微观结构, 对应着不同碱度, 碱度与结构之间存在的关联有待研究。
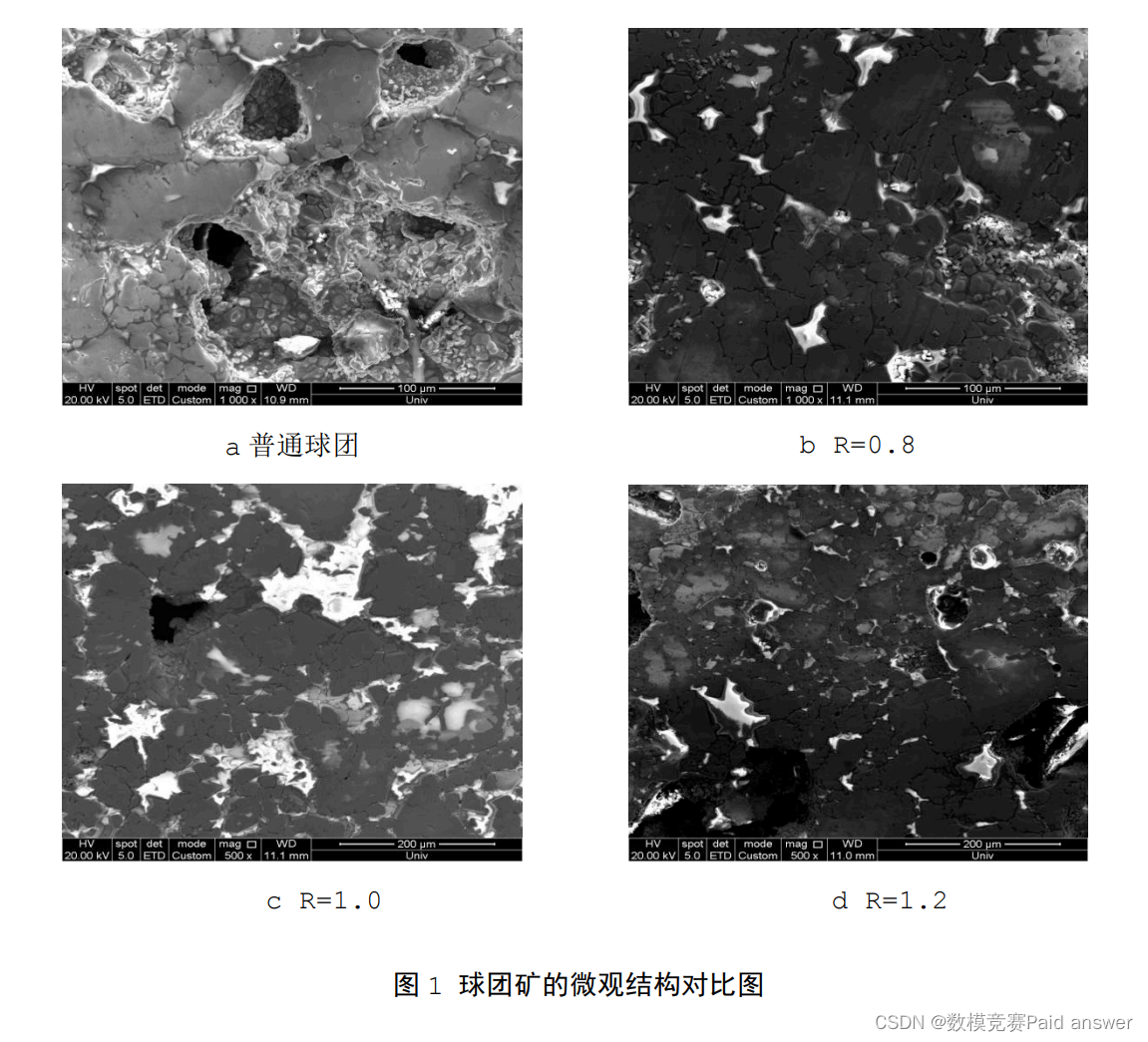
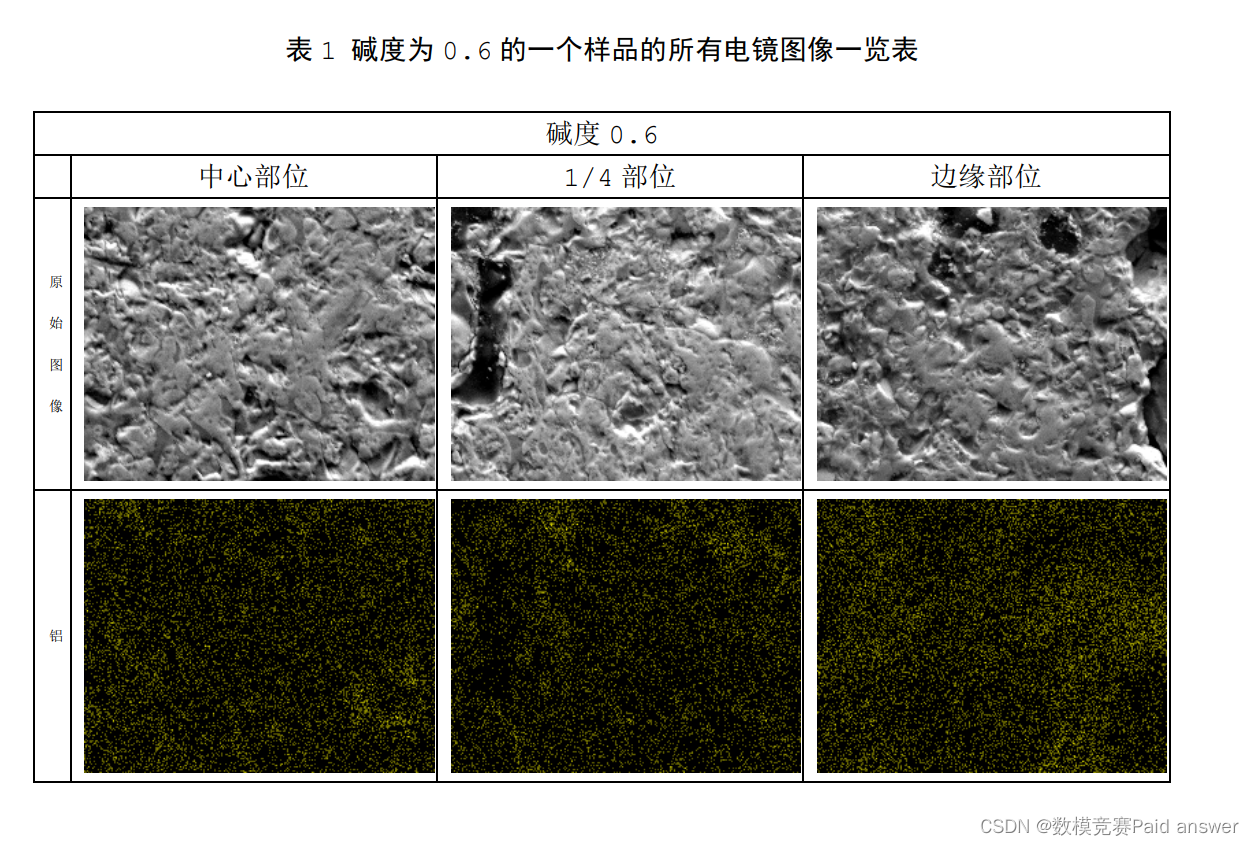
图 1 所示的不同碱度下的球团矿微观结构呈现了较为明显的视觉差异,造成差异的主要原因为球团矿中不同元素的大小和分布差异,这些元素主要有: [ 铝] ,[ 钙] , [ 碳] , [ 铁] , [ 镁] , [ 氧] , [ 硅] 。这些元素的大小和分布特征是影响其碱度的关键因素。SEM 电镜分析: 获取球团矿微观矿相, 将每一个球团矿样品进行切片磨光,在电镜下获取其中心部位、四分之一部位和边缘部位的矿相, 即每个样品获取三张原始矿相。电镜分析还能对每张矿相进行元素着色标记, 标记的元素有铝含量[ A1 ] 、钙含量[ Ca ] 、碳含量[ C ] 、铁含量[ Fe ] 、镁含量[ Mg ] 、氧含量[ o] 、硅含量[ Si ] , 获取碱度为 0 .6 的一个样品的所有电镜图像有 24 张, 见表 1 , 表 1 中每列是相互对应的,即第一行第一列为中心部位电镜原始图像,第二行第一列为中心部位[ A1 ] 元素的着色标记, 依次类推。
正题:
附件 1~ 附件 4 分别给出了碱度为 0 .6、0 .8、1 .0、1 .2 情况下的球团微观矿相, 基于附件中给定的内容, 解决如下三个问题(推荐用 MAmLAB 软件处理图像):
问题 1: 应用图像图形处理算法, 研究附件 1~ 附件 4 中的球团矿相, 试提取所有矿相的视觉特征(如: 表征不同元素或物质颗粒大小的边缘、面积等特征, 表征不同元素或物质分布的密度、聚集区域等特征, 表征矿相复杂性的分形、纹理等特征, 不局限于上述特征)。
问题 2: 纵向研究同一部位(均为中心部位或均为四分之一部位或均为边缘部位) 的矿相在四种碱度下各种特征的变化梯度。试提取可以表征球团矿碱度的矿相主特征, 并实现基于该主特征的碱度判别。(碱度判别指对碱度的类别识别, 实质是分类)。
问题 3:横向研究同一碱度(均为 0 .6 的碱度或均为 0 .8 的碱度或均为 1 .0的碱度或均为 1 .2 的碱度) 的矿相在三种部位下各种特征的变化梯度。试提取可以表征球团矿部位的矿相主特征, 并实现基于该主特征的部位判别。( 部位判别指对部位的类别识别, 实质也是分类)。
问题 4: 基于问题 1 至问题 3 的研究, 试判别附件 5 中给定的 24 张球团矿相的碱度类别和部位类别。需要说明的是附件 5 中的 24 张矿相来源于一个球团矿样品, 碱度类别的判别结果为一个值 (0 .6 或 0 .8 或 1 .0 或 1 .2 )。
问题 5: 完成一篇给球团矿生产者的操作说明 (简明扼要的写出实现问题 4的操作步骤, 带截图, 字数少于 1000 , 页数不限), 并将该操作说明与其相关的文件放入一个文件夹内打包作为支撑材料提交。
整体求解过程概述(摘要)
本文主要针对球团矿矿相特征迁移规律进行研究,首先采用图像图形处理算法提取矿相的视觉特征,其次通过横向比较和纵向分析分别建立碱度与矿相微观结构、部位与矿相微观结构的矿相碱度判别模型和矿相部位综合判别模型,最后基于上述模型确定附件 5 中球团矿相的碱度和部位类别。
针对问题一,首先我们用 MATLAB 提取附件 1~附件 4 中所有球团矿相的灰度图像,再应用图像分割算法分离出电镜扫描图像中矿相微观结构孔隙的二值图和矿相元素颗粒分布的二值图。随后根据分割出图像的几何特征和分布特征,我们提出矿相孔隙平均直径(MA)、孔隙比(PO)、孔隙分形维数(Dim)、矿相元素聚集区域分形维数(Dimbox)、聚集体延展方向发散度(StdD)、聚集体发散方向均匀度(StdU)、矿相元素格子均值(NorM)、矿相元素格子分布均匀度(NorS)八种特征参数用于表征矿相电镜扫描图像的视觉特征。
针对问题二,为研究矿相同一部位在不同碱度下各种特征的变化梯度,结合问题一中提出的表征电镜扫描图像的八种特征参数,我们选取中心部位矿相微观结构图和矿相元素分布图在各个碱度下的参数值。首先用单调模型判断各元素的各个参数与碱度增加的相关性,计算单调相关系数;其次结合单调相关系数采用改进的多元回归拟合各组参数与碱度变化的相关系数,权重系数绝对值越大对应的参数对碱度变化贡献越大。剔除系数较小即对碱度变化不明显的参数系数即得到同一部位影响碱度变化的主特征参数,最后根据保留的参数建立碱度判别判据。同时,在 1/4 部位和边缘部位使用判别模型结果显示其准确程度为 87.5%。
针对问题三,首先用聚类分析将所有球团矿相聚为两类,即矿相微观结构图和各矿相元素分布图。其次在问题一确定的八种特征参数的基础上,以 0.6 碱度
为例,研究矿相微观结构图和各矿相元素分布图八种特征参数随部位的化关系。研究结果显示,对于矿相微观结果图,主特征参数 MA、PO、StdD 与部位变化有明显的规律,对于各矿相元素分布图,主特征参数 StdD、StdU、NorM 与部位变化具有明显的规律。最后根据以上规律,建立了球团矿相部位综合判别模型,同时基于该判别模型,也可实现其他三种碱度矿相的部位判别。
针对问题四,首先采用问题一的方法,根据图像图形处理算法,提取附件 5中矿相微观结构图的主特征参数 MA、PO、StdD 以及各矿相元素分布图的主特征参数 StdD、StdU、NorM,然后分别将上述主特征参数代入问题三建立的球团矿相部位综合判别模型,实现球团矿相部位判别。最后后提取同一部位的特征参数,代入问题二建立的矿相碱度判别模型,实现球团矿相碱度判别。
针对问题五,根据问题一至问题四提取球团矿相特征参数,建立矿相部位综合判别模型和矿相碱度判别模型的步骤,完成一篇给球团矿生产者的操作说明。基于该操作说明,可实现对球团矿矿相的部位判别和碱度判别。
模型假设:
1、假设矿相电镜扫描图像不同部位的特征参数受碱度影响的趋势一致,即任意部位特征参数随碱度变化的趋势同样适用于其它部位。
2、假设矿相电镜扫描图像任意碱度下不同部位的特征参数变化趋势同样适用于其它碱度。
3、假设附件中的图片均能代表不同碱度和不同部位的主要视觉特征。
4、假设图片分割算法对特征参数提取影响很小,可以忽略不计。
问题分析:
问题 1 的分析
首先我们需要通过 MATLAB 提取附件 1~附件 4 中所有球团矿相的灰度图像,再应用图像分割算法分离出电镜扫描图像中矿相微观结构孔隙的二值图和矿相元素颗粒分布的二值图。随后根据分割出图像的几何特征和分布特征,我们提出了矿相孔隙平均直径(MA)、孔隙比(PO)、孔隙分形维数(Dim)、矿相元素聚集区域分形维数(Dimbox)、聚集体延展方向发散度(StdD)、聚集体发散方向均匀度(StdU)、矿相元素格子均值(NorM)、矿相元素格子分布均匀度(NorS)八个指标表征矿相电镜扫描图像的视觉特征。
问题 2 的分析
纵向研究同一部位的矿相在四种碱度下各种特征的变化梯度,试提取可以表征球团矿碱度的矿相主特征,并实现基于该主特征的碱度判别。为研究同一部位的矿相碱度下各种特征的变化梯度,结合问题一中提出的表征电镜扫描图像的八个参数,我们用 matlab 计算中心部位微观结构图和元素分布图在各个碱度下的参数值。建立判别模型前我们先用单调模型判断各元素的各个参数与碱度变化的相关性,即提取出随着碱度单调变化参数也发生单调变化的参数;随后我们可以利用多元线性回归拟合各组参数与碱度的系数,系数绝对值越大对应的参数对碱度变化就越明显。剔除系数较小即对碱度变化不明显的参数系数即得到同一部位影响碱度变化的主特征参数,并根据保留的参数建立碱度判别判据。同时,为了验证我们提出的判据,我们将其它部位在多个碱度的参数信息代入测试其准确程度。
问题 3 的分析
问题三需要研究同一碱度的的矿相在三个部位的变化梯度。需要结合问题一中的确定的八种特征指标进行分析,首先运用聚类分析将各种矿相分为不同的两个部分。然后在两类矿相的基础上研究八个特征参数随部位变化的关系,进而分析八种特征参数的变化规律,最后从中提取出矿相主特征并实现部位判别。
问题 4 的分析
首先我们将附件 5 中未知碱度和部位类别的 24 张球团矿相,采用
问题 1 中的图像图形处理算法对其进行分析,从而得到矿相微观结构图的主特征参数 MA、PO、StdD,将其代入问题 3 建立的对应于矿相微观结构图的“球团矿相部位综合判别模型”,实现矿相微观结构图的部位判别。接着将得到的各元素矿相分布图的主特征参数 StdD、StdU、NorM,代入对应于矿相元素分布图的的“球团矿相部位综合判别模型”,实现矿相元素分布图的部位判别;最后对已实现部位判别的球团矿,提取同一部位的特征参数,代入问题 2 建立的“矿相碱度判别模型”,实现球团矿相碱度判别。并对另两个部位也进行碱度判别,检验此碱度的准确性。
模型的建立与求解整体论文缩略图
全部论文请见下方“ 只会建模 QQ名片” 点击QQ名片即可
程序代码:(代码和文档not free)
The actual procedure is shown in the screenshot
model_conv = torchvision.models.resnet18(pretrained=True)
for param in model_conv.parameters():param.requires_grad = False #特征层中参数都固定住,不会发生梯度的更新;# Parameters of newly constructed modules have requires_grad=True by default
num_ftrs = model_conv.fc.in_features
model_conv.fc = nn.Linear(num_ftrs, 2)model_conv = model_conv.to(device)criterion = nn.CrossEntropyLoss()# Observe that only parameters of final layer are being optimized as
# opposed to before.
optimizer_conv = optim.SGD(model_conv.fc.parameters(), lr=0.001, momentum=0.9) #定义一个优化器,这个优化器的作用是优化全连接层中的参数# Decay LR by a factor of 0.1 every 7 epochs
exp_lr_scheduler = lr_scheduler.StepLR(optimizer_conv, step_size=7, gamma=0.1)