比较 2 名无人机驾驶员:借助分析飞得更高
近年来,越来越多的政府和执法机构使用无人机从空中鸟瞰。为了高效执行任务,无人机必须能够快速机动到预定目标。快速机动使它们能够在复杂的环境中航行,并高效地完成任务。成为认证的无人机驾驶员的要求因国家/地区而异,但都要求您通过由航空管理局管理的航空知识笔试。令人惊讶的是,并不要求展示飞行表现(截至本文发布时)。那么我们如何对两个认证的无人机驾驶员的飞行技能进行比较呢?
场景:
有两名经过认证的无人机驾驶员 Aleks 和 Dustin,需要评估他们将无人机定位到指定目标的速度,在本例中,目标位于距离起飞地点 500 英尺的位置。
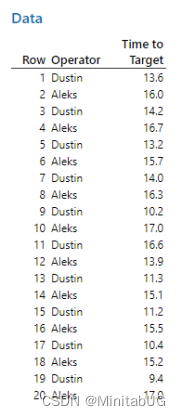
我们希望比较一下 Aleks 和 Dustin 的表现是否有所不同。出发时开始以秒为单位计时(包括升空、移动到目标)。实际差异为 0.5 秒,这意味着如果一名驾驶员能够让无人机领先 ½ 秒到达地点,就表示其表现更好。实验数据如下:
使用 Minitab,我们可以快速创建描述性统计量。
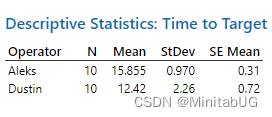
我们看到,在十次飞行中,Aleks 的平均到达时间为 15.86 秒,而 Dustin 的平均到达时间为 12.42 秒。
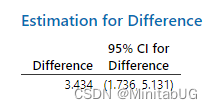
估计的差值为 3.4 秒。 95% 置信区间告诉我们,驾驶员之间的真实平均差异小至 1.736 秒,大至 5.131 秒。 基于这个置信区间,我们可以自信地说飞行时间不仅不同于零,而且因为差异的置信区间下限大于我们 0.5 秒的实际差异,我们得出的结论是,Dustin 是本次测试中表现更好的无人机驾驶员。
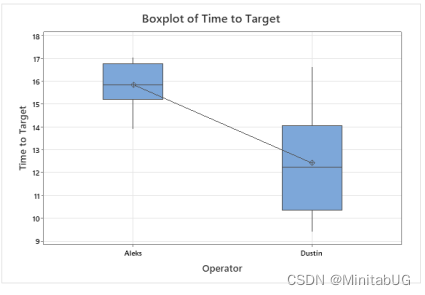
飞行时间的箱线图提供了分析的可视化:
未来我们可以进行后续实验,包括多种距离、障碍物、多种飞行条件以及多架无人机,供飞行员使用。Minitab 提供分析和可视化功能,可以轻松衡量表现。