让Pegasus天马座开发板实现超声波测距
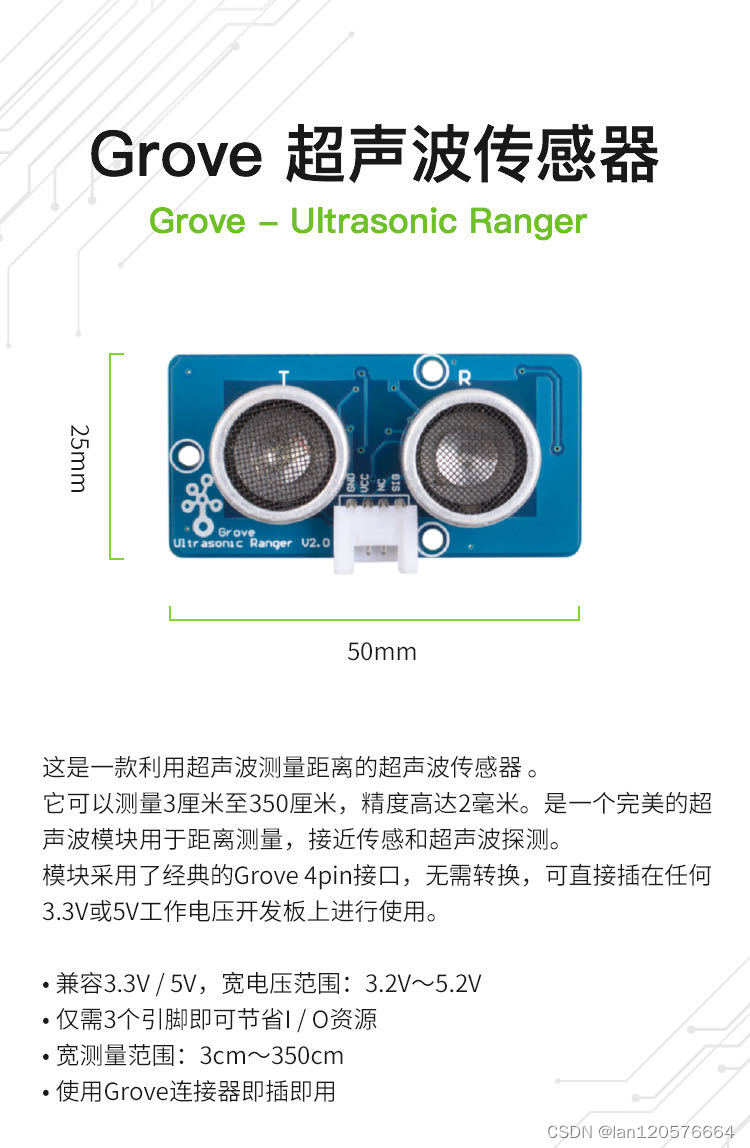
在完成《让Pegasus天马座开发板用上OLED屏》后,我觉得可以把超声波测距功能也在Pegasus天马座开发板上实现。于是在箱子里找到了,Grove - Ultrasonic Ranger 这一超声波测传感器。
官方地址: https://wiki.seeedstudio.com/Grove-Ultrasonic_Ranger
超声波传感器使用
Grove - Ultrasonic Ranger测距模块一般配备有一个标准的Grove接口,使得接线变得简单。通常,这个模块有4个引脚:
- VCC:供电引脚,通常连接到5V。
- GND:地引脚,连接到微控制器的GND。
- SIG:信号引脚,用于传输数据。
- NC:未连接(No Connection),通常不用
其中SIG信号引脚,是触发信号引脚,也是发送测距时长反馈引脚(高电平的时长为超声波往返距离所以使用的时间)。
- 触发信号: 发送一个大于10us的脉冲信号到SIG引脚
- 回复信号: 接收脉冲及得到高电平时间长度
按照初中物理声音传播公式:
我们只要测出公式中T所用的时间,即可得到距离。
硬件接线
为了方便捕获SIG信号高脉冲的宽度,为使用芯片的TIMER2的通道3作为输入捕获口。此通道对应的是PA3这个IO口。如下图所示:
 功能实现思路
功能实现思路
- 发送出发信号到SIG引脚
配置PA3推挽输出口,并拉高10us的高电平 - 接收SIG引脚并检测高电平时间
配置PA3为悬浮输入并将TIMER2配置为在通道3启用输入捕获模式。然后,先后捕获上升沿及下降沿时的时间点。通过这两个参数,即可计算得到超声波往返点时间。 - 通过得到时间后,套用物理公式即可得到转换后的距离
- 得到距离数据后,即可将数值显示到OLED上,实现动态测距
main.c代码
#include "config.h"
#include "delay.h"
#include "ultrasonic.h"
#include "oled.h"#define LED_GPIO_PORT GPIOD
#define LED_PIN GPIO_PIN_4#define BUTTON_GPIO_PORT GPIOD
#define BUTTON_PIN GPIO_PIN_3static void init_gpio()
{GPIO_Init(LED_GPIO_PORT, LED_PIN, GPIO_MODE_OUT_PP_LOW_FAST);GPIO_Init(BUTTON_GPIO_PORT, BUTTON_PIN, GPIO_MODE_IN_PU_NO_IT); OLED_Init();
}
void set_screen_color_and_display(uint8_t cfg)
{// BIT0作为屏幕颜色控制 0: 正常显示, 1: 反色显示OLED_ColorTurn(cfg & 0x01);// BIT1作为屏幕颜色控制 0: 正常显示 1: 屏幕翻转显示 OLED_DisplayTurn((cfg >> 1) & 0x01);
}void main(void)
{static uint8_t testBuffer[32] = {0};static uint8_t k = 0;bool isKeyDown = FALSE;uint8_t screenCfg = 0;uint8_t t = ' ';uint32_t range = 0;disable_interrupts();for (uint16_t i = 0; i < sizeof(testBuffer); i++){testBuffer[i] = i;}enable_interrupts();LOG("Startup...\r\nss");DUMP(testBuffer,sizeof(testBuffer));init_gpio();OLED_ColorTurn(0);//0正常显示,1 反色显示OLED_DisplayTurn(0);//0正常显示 1 屏幕翻转显示 while (1){ GPIO_WriteReverse(LED_GPIO_PORT,LED_PIN);isKeyDown = GPIO_ReadInputPin(BUTTON_GPIO_PORT,BUTTON_PIN) == RESET;range = ultrasonic_get_range_in_centimeters();LOG("<OLED Test> app_sdcc == %u key %s , range == %lu cm\r\n",k++, isKeyDown ? "down" : "up",range);if (isKeyDown == TRUE){if (++screenCfg > 3){screenCfg = 0;}set_screen_color_and_display(screenCfg);OLED_Clear(); }OLED_ShowString(25,0,"Pegasus Board",8);OLED_ShowString(35,2,"2023/09/20",8);OLED_ShowString(20,4,isKeyDown ? "Button Down" : "Button Up ",8);OLED_ShowNum(90,4,range,3,8);OLED_ShowString(108,4," cm",8); OLED_ShowString(0,6,"ASCII:",8); OLED_ShowString(63,6,"CODE:",8);OLED_ShowChar(48,6,t,8);t++;if(t>'~')t=' ';OLED_ShowNum(103,6,t,3,8); delay(500);}
} #ifdef USE_FULL_ASSERT/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/
void assert_failed(uint8_t* file, uint32_t line)
{ /* User can add his own implementation to report the file name and line number,ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */LOG("Wrong parameters value: file %s on line %d\r\n", file, line); /* Infinite loop */while (1){}
}
#endif运行效果
让Pegasus天马座开发板实现超声波测距
工程分享
工程下载路径
