当前位置: 首页 > news >正文 Mac如何打开隐藏文件中Redis的配置文件redis.conf news 2025/7/12 14:21:10 Redis下载(通过⬇️博客下载的Redis默认路径为:/usr/local/etc) Redis下载 1.打开终端进入/usr文件夹 cd /usr 2.打开/local/文件夹 open local 3.找到redis.conf并打开,即可修改配置信息 查看全文 http://www.lryc.cn/news/120995.html 相关文章: nginx+flask+uwsgi部署遇到的坑 vue实现pdf预览功能 (原创)Flutter与Native页面互相跳转 web集群学习--基于CentOS构建LVS-DR集群、配置nginx负载均衡 基于 FPGA 的电机控制 STM32F429IGT6使用CubeMX配置IIC通信(AT2402芯片) JS逆向系列之猿人学爬虫第14题-备而后动-勿使有变 学cpp看的那点书 【C++】常用容器-string容器 SSH无法连接kali,拒绝密码 竞赛项目 深度学习的口罩佩戴检测 - opencv 卷积神经网络 机器视觉 深度学习 redis 数据结构(一) 【高频面试题】JVM篇 第十三次CCF计算机软件能力认证 无人驾驶实战-第十二课(强化学习自动驾驶系统)(完) 【flask sqlalchmey】一次性将返回的列表对象或者 一行数据对象转成dict---flask-sqlalchemy输出json格式数据 goland插件推荐Rider UI Theme Pack 人工智能面试常识-10 Android JNI开发从0到1,java调C,C调Java,保姆级教程详解 STM32基于CubeIDE和HAL库 基础入门学习笔记:功能驱动与应用 创建型模式 (Creational Patterns) 玄子Share 设计模式 GOF 全23种 + 七大设计原则 【脚踢数据结构】队列(顺序和链式) linux添加磁盘 图片懒加载 scope,deep穿透的实际应用 Multipass虚拟机设置局域网固定IP同时实现快速openshell的链接 Webpack5 core-js和babel-loader区别和用法 软考高级架构师——5、系统规划分析与设计方法 区块链学习6-长安链部署:如何创建特定共识节点数和同步节点数的链 北航基于openEuler构建工业机器人操作系统,打造“开箱即用”的机器人基础软件平台
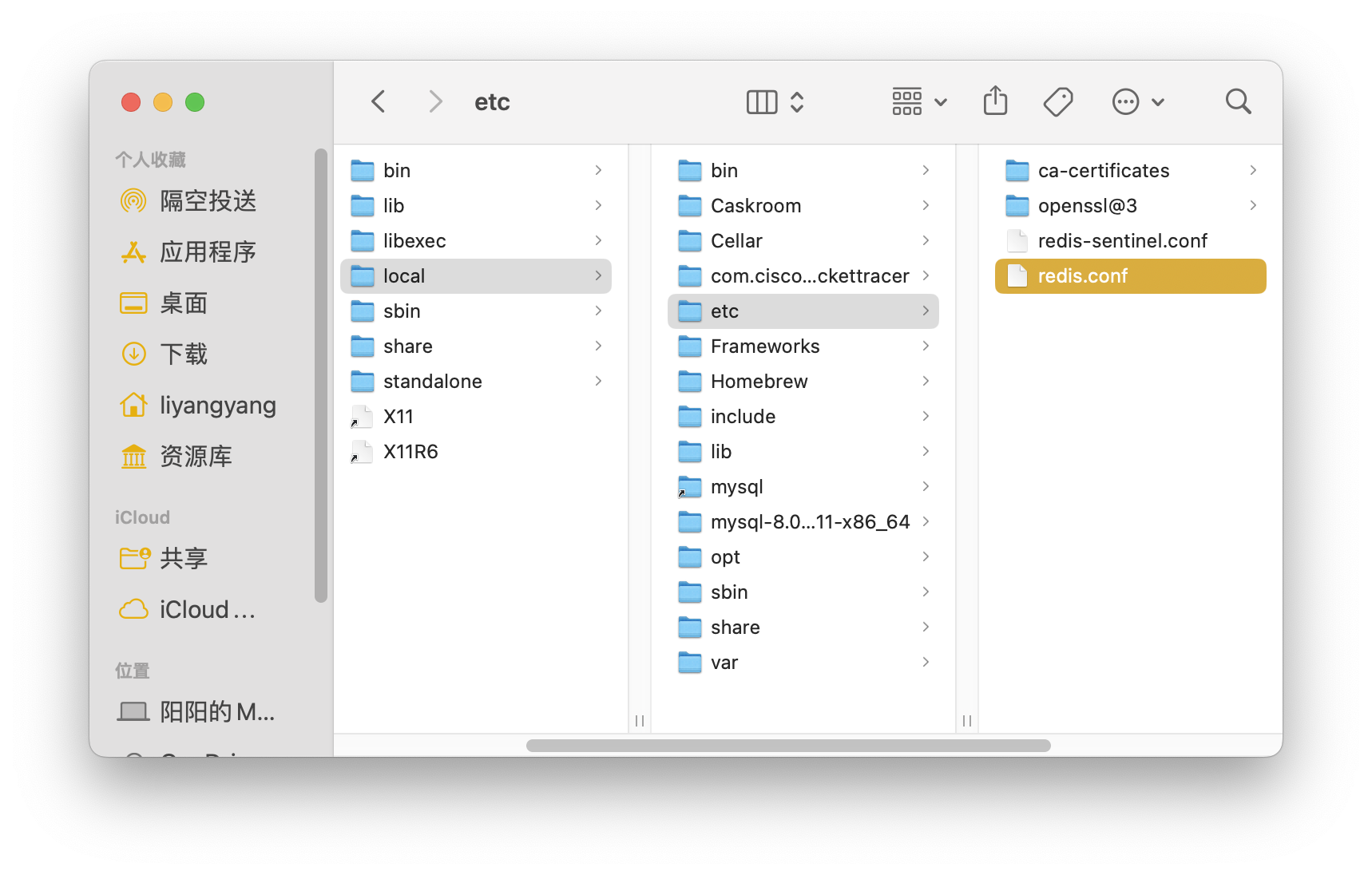
Redis下载(通过⬇️博客下载的Redis默认路径为:/usr/local/etc) Redis下载 1.打开终端进入/usr文件夹 cd /usr 2.打开/local/文件夹 open local 3.找到redis.conf并打开,即可修改配置信息 查看全文 http://www.lryc.cn/news/120995.html 相关文章: nginx+flask+uwsgi部署遇到的坑 vue实现pdf预览功能 (原创)Flutter与Native页面互相跳转 web集群学习--基于CentOS构建LVS-DR集群、配置nginx负载均衡 基于 FPGA 的电机控制 STM32F429IGT6使用CubeMX配置IIC通信(AT2402芯片) JS逆向系列之猿人学爬虫第14题-备而后动-勿使有变 学cpp看的那点书 【C++】常用容器-string容器 SSH无法连接kali,拒绝密码 竞赛项目 深度学习的口罩佩戴检测 - opencv 卷积神经网络 机器视觉 深度学习 redis 数据结构(一) 【高频面试题】JVM篇 第十三次CCF计算机软件能力认证 无人驾驶实战-第十二课(强化学习自动驾驶系统)(完) 【flask sqlalchmey】一次性将返回的列表对象或者 一行数据对象转成dict---flask-sqlalchemy输出json格式数据 goland插件推荐Rider UI Theme Pack 人工智能面试常识-10 Android JNI开发从0到1,java调C,C调Java,保姆级教程详解 STM32基于CubeIDE和HAL库 基础入门学习笔记:功能驱动与应用 创建型模式 (Creational Patterns) 玄子Share 设计模式 GOF 全23种 + 七大设计原则 【脚踢数据结构】队列(顺序和链式) linux添加磁盘 图片懒加载 scope,deep穿透的实际应用 Multipass虚拟机设置局域网固定IP同时实现快速openshell的链接 Webpack5 core-js和babel-loader区别和用法 软考高级架构师——5、系统规划分析与设计方法 区块链学习6-长安链部署:如何创建特定共识节点数和同步节点数的链 北航基于openEuler构建工业机器人操作系统,打造“开箱即用”的机器人基础软件平台