ROS实现自定义信息以及使用
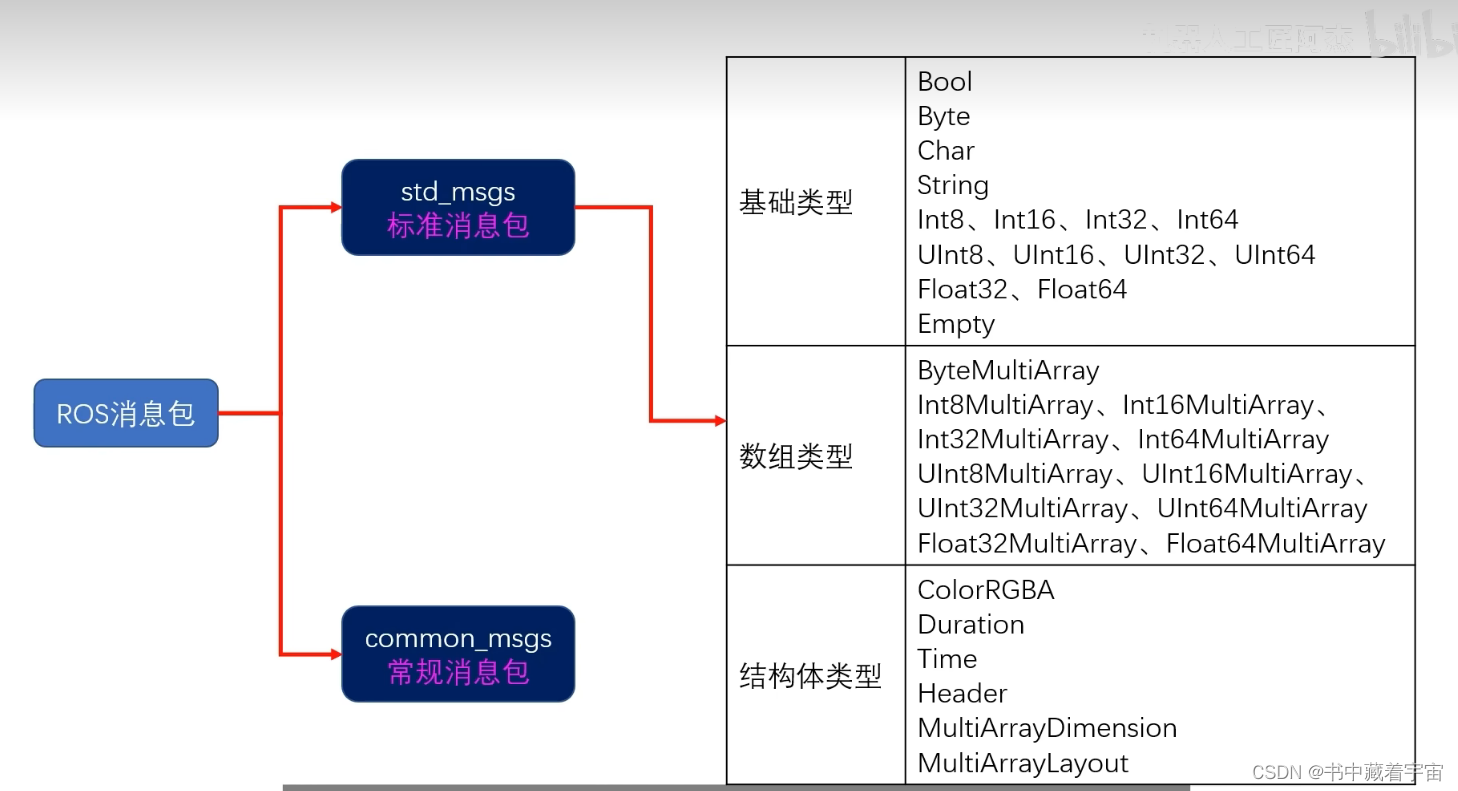
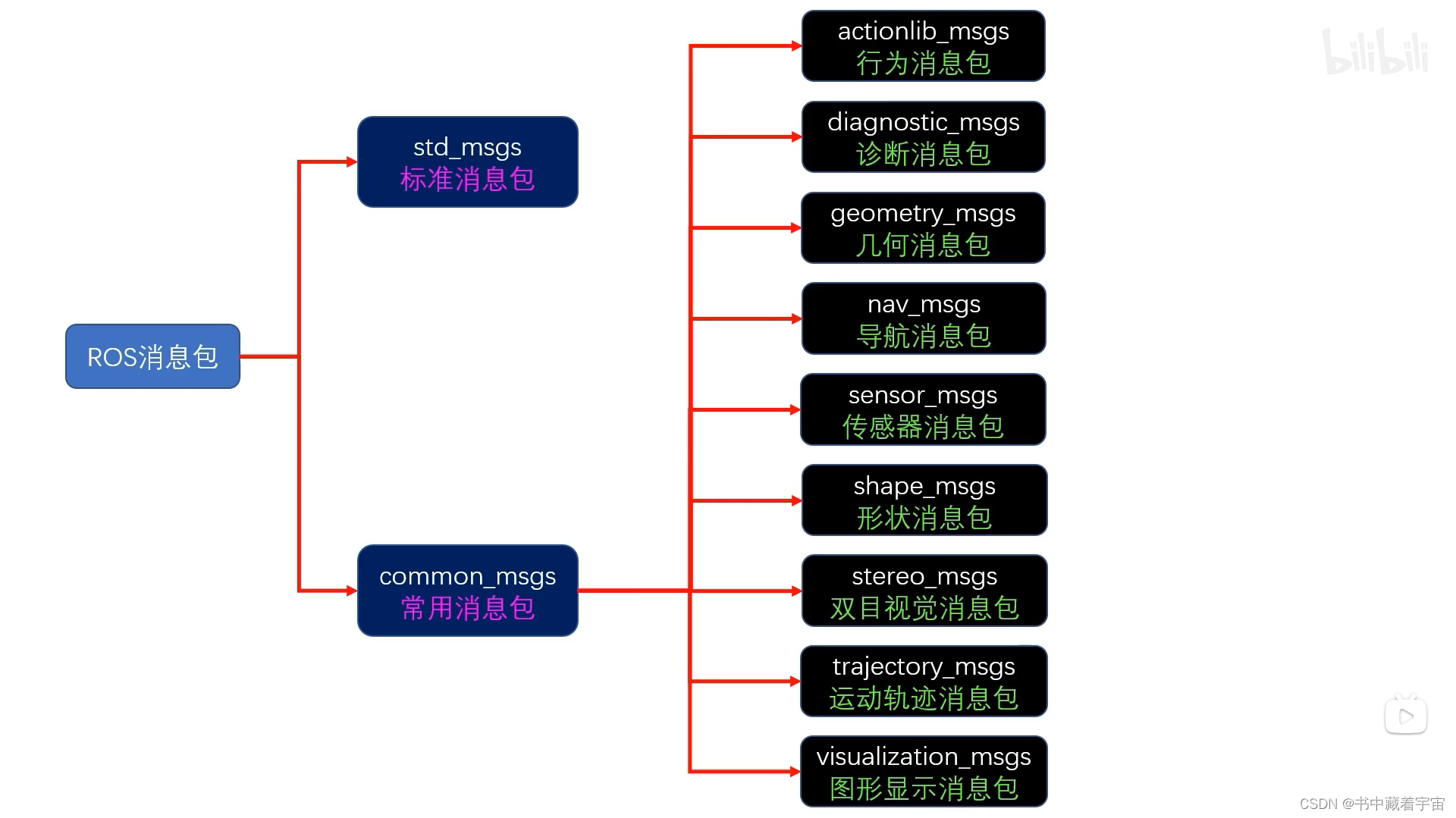
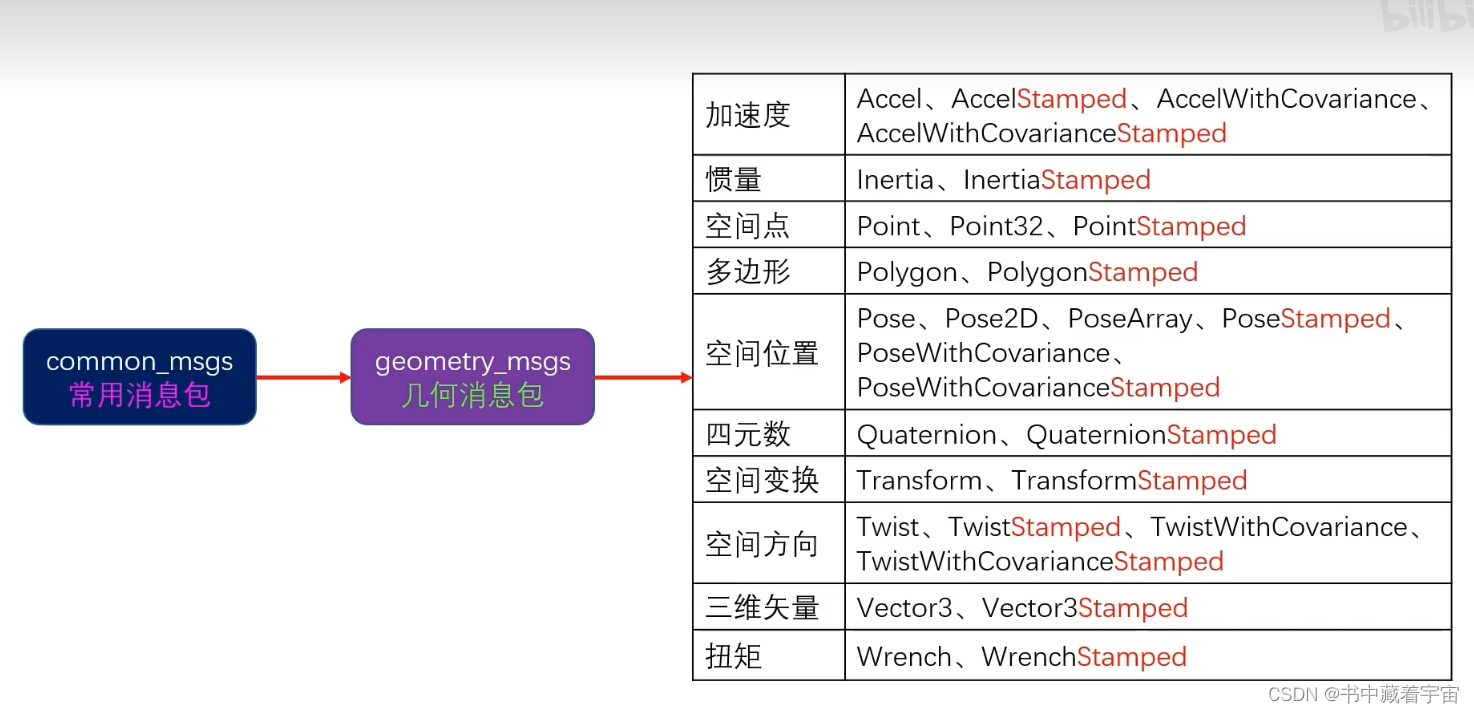
常见的消息包
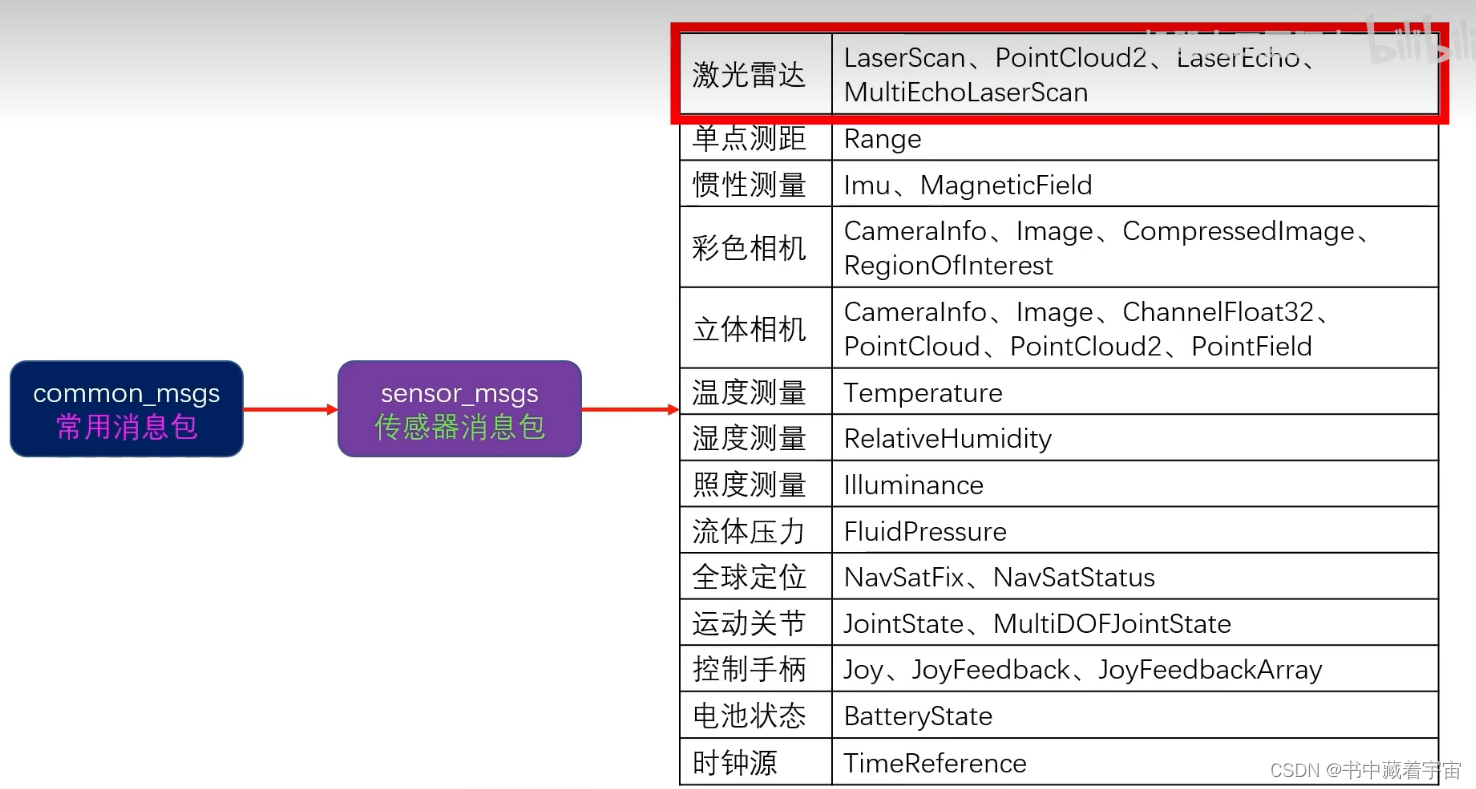
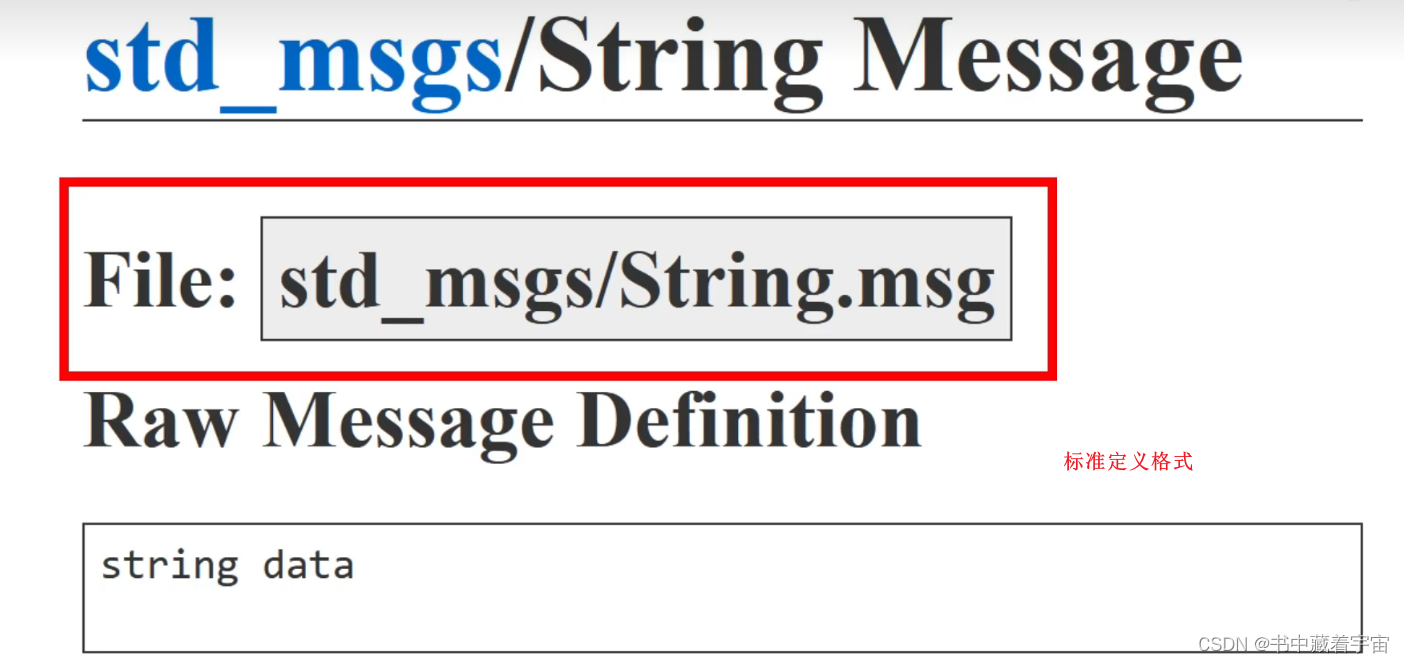
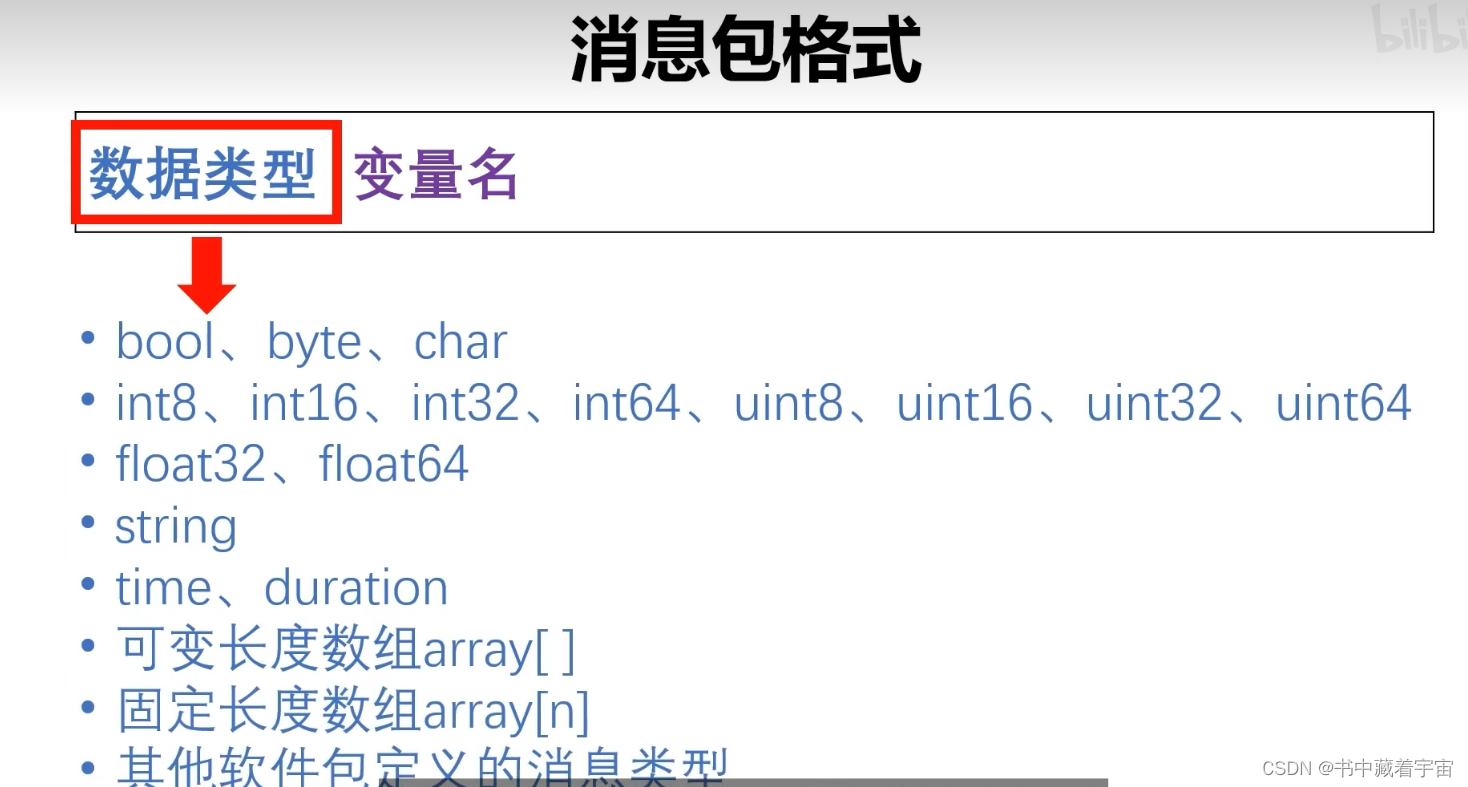
消息包定义一般如下👇
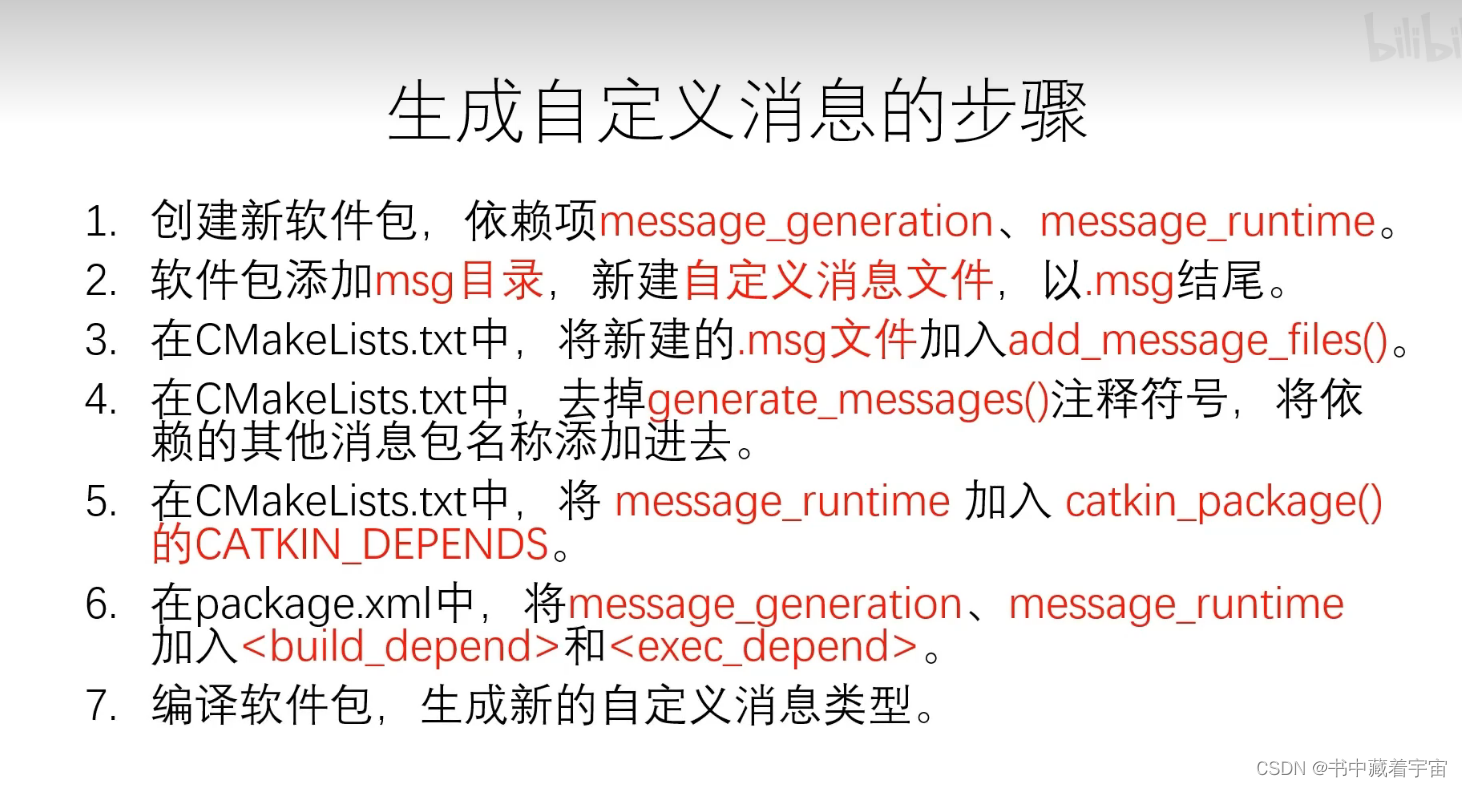
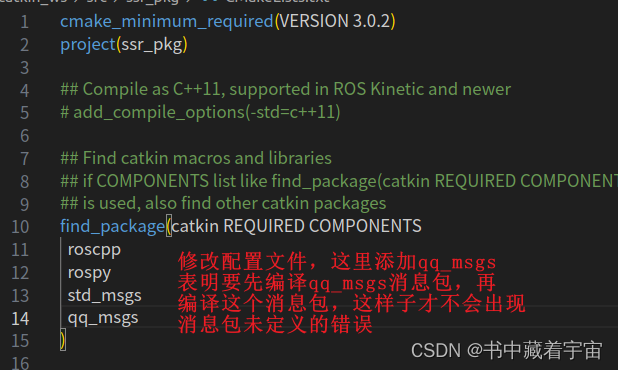
(1)创建包和依赖项


(2)在新建的qq_msgs的包新建msgs的文件夹,在该文件夹里面新建Carry.msg类型的文件。
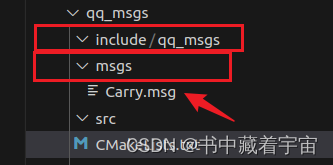
其实,Carry.msg就是你自己定义的消息类型,属于qq_msgs包下面的。
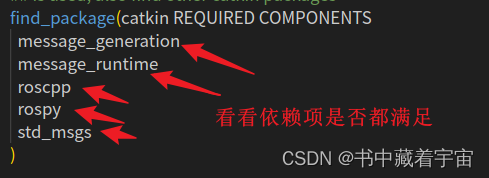
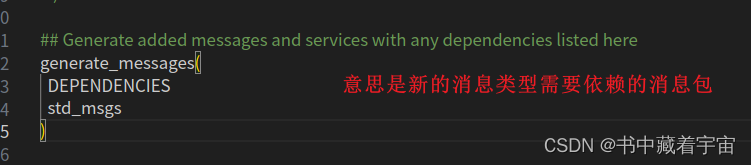
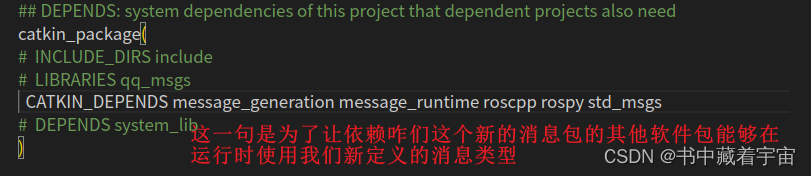
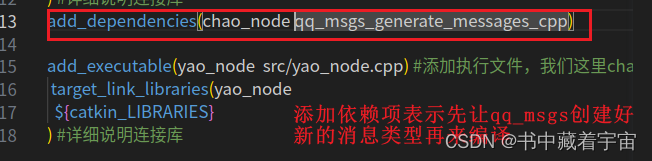
(3)在对应CMakeList.txt文件下查看如下信息
- 查看依赖项是否都满足
- (4)选中如下文件
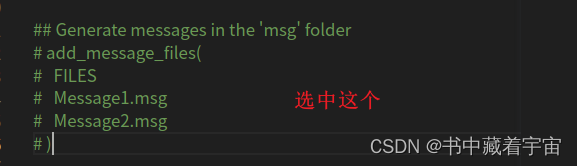
- 取消注释
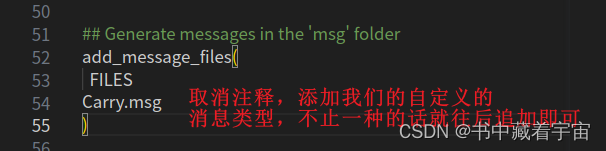
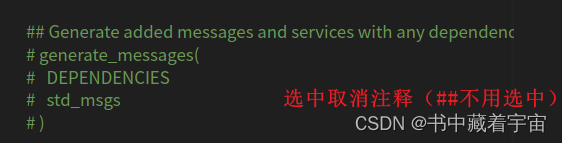
因为我们只需要使用string 还有int64类型的数据组成我们的新的消息包,所以就只需要包括标准消息包就可以了。
保存即可
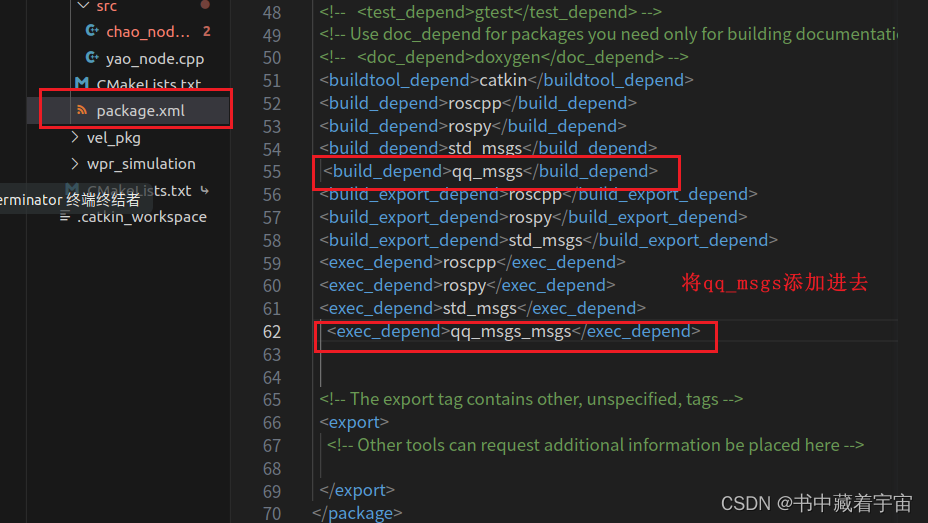
(5)打开package.xml文件
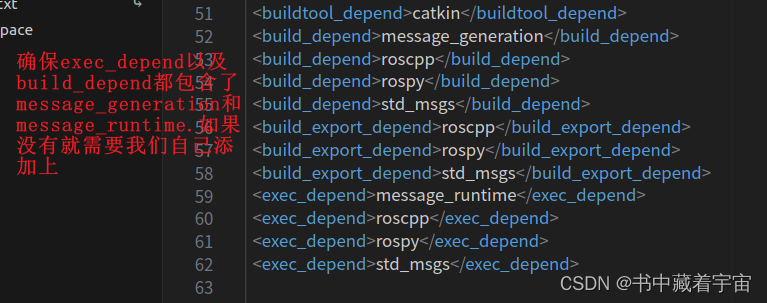

(6)保存 编译

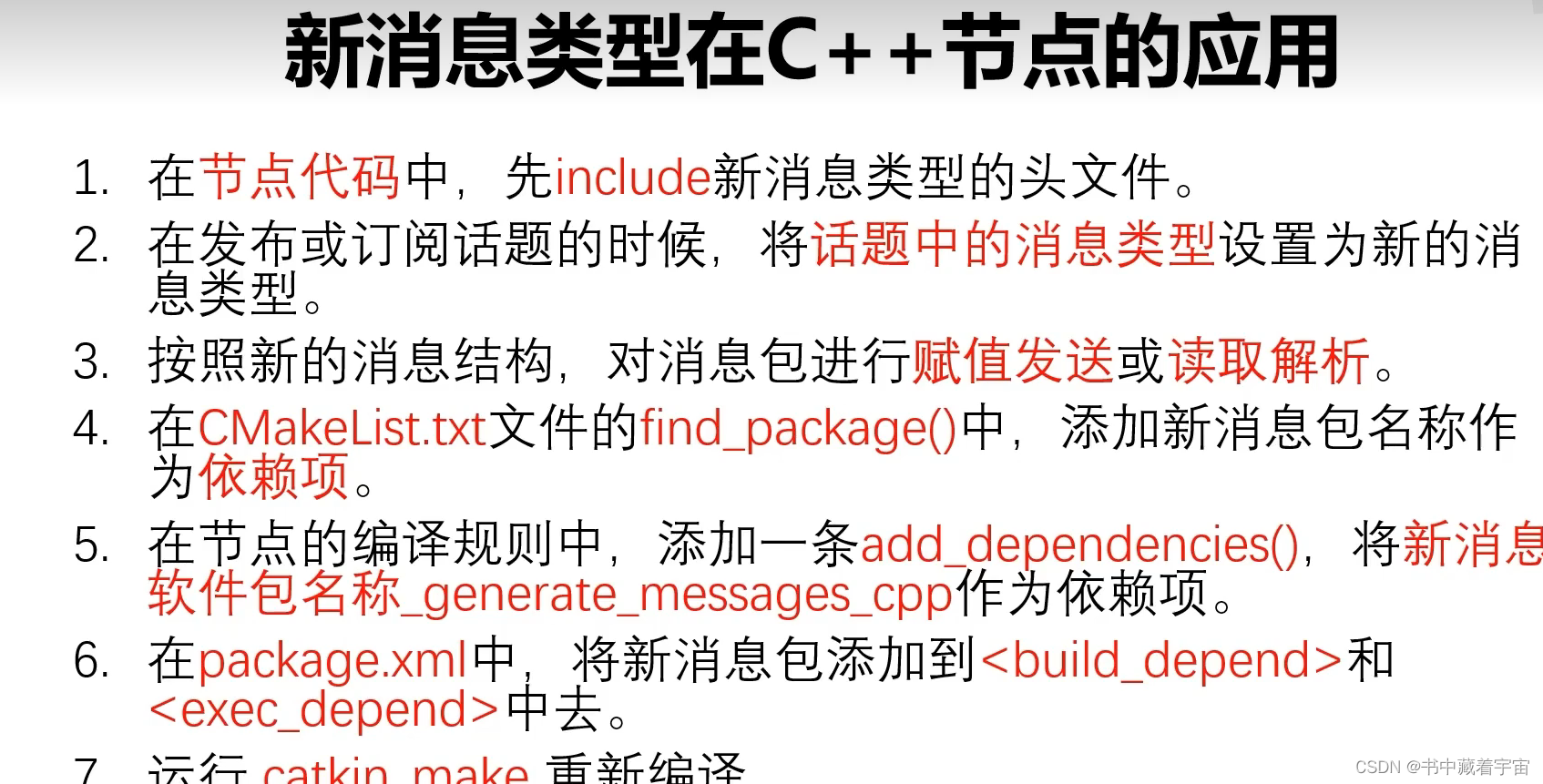
使用新的消息包
chao_node节点文件如下
#include<ros/ros.h>
#include<std_msgs/String.h>#include<qq_msgs/Carry.h> //引进我们自己的消息包int main(int argc, char *argv[])
{ros::init(argc, argv, "chao_node");printf("小马同学,hello welcome coming Ros world! \n ");// 建立节点句柄ros::NodeHandle nh;//建立发布者ros::Publisher pub=nh.advertise<qq_msgs::Carry>("play_game_topic",10);//控制循环次数,ros系统给我自带了控制语句,不用我们自己写睡眠函数ros::Rate loop_rate(10); // publish 10 times of per secondwhile(ros::ok()){printf("xiaoma will carry !\n");//开始定义标准消息包、qq_msgs::Carry msg;msg.grade = "hornor";msg.star=30;msg.data="please come on!\n";//给发布者发布pub.publish(msg);loop_rate.sleep();//调用loop_rate的sleep函数,让其产生短暂的阻塞}return 0;
}
ma_node的代码
#include<ros/ros.h>
#include<std_msgs/String.h>
#include<qq_msgs/Carry.h> //引进我们自己的消息包
void xiaoli_callback(qq_msgs::Carry msg)
{ROS_INFO(msg.grade.c_str());ROS_INFO("%lld", msg.star);ROS_INFO(msg.data.c_str());}void play_game_callback(qq_msgs::Carry msg)
{ROS_WARN(msg.data.c_str());//这个输出语句只是把输出内容变成还黄色
}int main(int argc, char *argv[])
{ros::init(argc, argv, "ma_node");printf("马同学,我将接受发布者的消息! \n ");// 建立节点句柄ros::NodeHandle nh;//建立订阅者1ros::Subscriber sub=nh.subscribe("xiang_he_xiao_ma_wan_you_xi",10,xiaoli_callback);//建立订阅者2不能和第一个名字一样ros::Subscriber sub2=nh.subscribe("play_game_topic",10,play_game_callback);while(ros::ok()){ros::spinOnce();}return 0;
}他的配置文件格式与chao_node一样,分别是CMakeList.txt文件和package.xml文件。
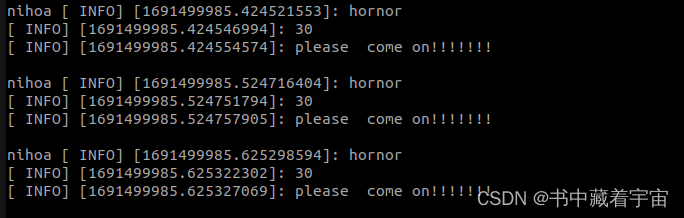
运行结果: