open3d 裁剪点云
目录
1. crop_point_cloud
2. crop
3. crop_mesh
1. crop_point_cloud
关键函数
chair = vol.crop_point_cloud(pcd) # vol: SelectionPolygonVolume
import open3d as o3dif __name__ == "__main__":# 1. read pcdprint("Load a ply point cloud, crop it, and render it")sample_ply_data = o3d.data.DemoCropPointCloud()pcd = o3d.io.read_point_cloud(sample_ply_data.point_cloud_path)# 2. crop# vol: SelectionPolygonVolume, 定义裁剪区域vol = o3d.visualization.read_selection_polygon_volume(sample_ply_data.cropped_json_path) chair = vol.crop_point_cloud(pcd)# 2. view# Flip the pointclouds, otherwise they will be upside down.pcd.transform([[1, 0, 0, 0], [0, -1, 0, 0], [0, 0, -1, 0], [0, 0, 0, 1]])chair.transform([[1, 0, 0, 0], [0, -1, 0, 0], [0, 0, -1, 0], [0, 0, 0, 1]])print("Displaying original pointcloud ...")o3d.visualization.draw([pcd])print("Displaying cropped pointcloud")o3d.visualization.draw([chair])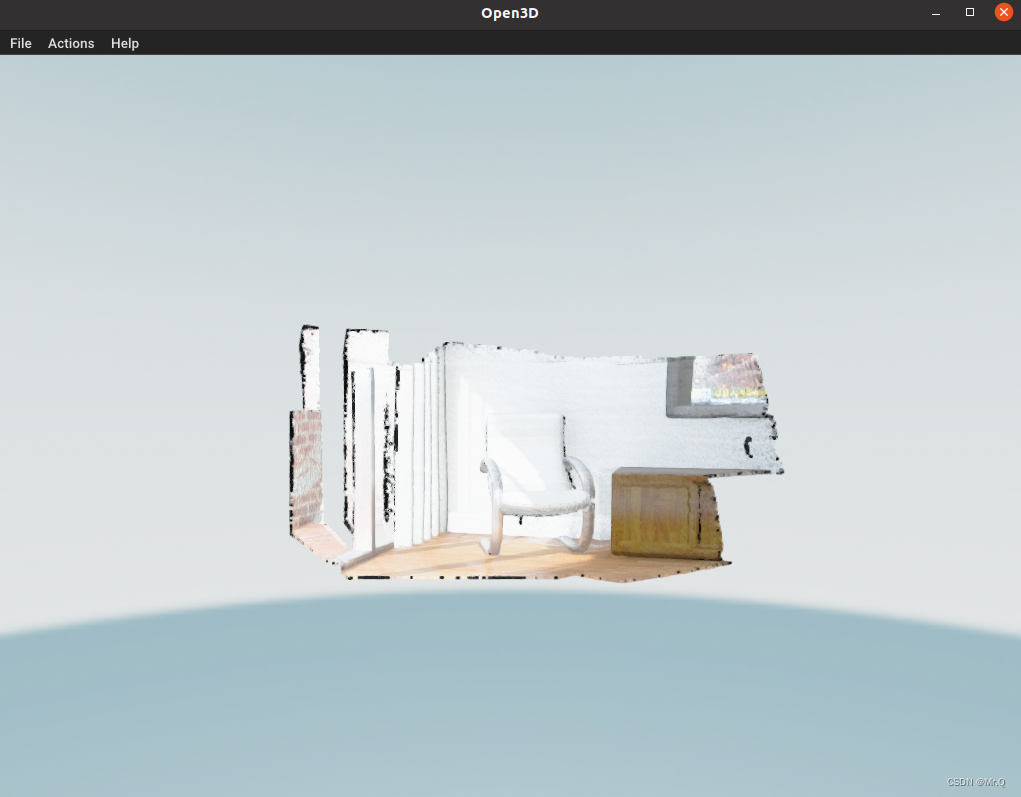

2. crop
pcd_cropped = pcd.crop(bbox) # pcd: PointCloud. bbox: AxisAlignedBoundingBox
AxisAlignedBoundingBox ![]() https://blog.csdn.net/jizhidexiaoming/article/details/130561514?spm=1001.2014.3001.5501
https://blog.csdn.net/jizhidexiaoming/article/details/130561514?spm=1001.2014.3001.5501
# 1. read pcd
print("Load a ply point cloud, crop it, and render it")
sample_ply_data = o3d.data.DemoCropPointCloud()
pcd = o3d.io.read_point_cloud(sample_ply_data.point_cloud_path)# 2. 定义裁剪区域。沿着y轴过滤: 只返回y坐标在[0.1,2]之间的点
bounds_list = [[-math.inf, math.inf], [0.8, 2], [-math.inf, math.inf]] # xyz边界范围
# list2tuple, limit points边界点。itertools.product排列笛卡尔乘积是x,y,z各取一个值,组成xyz点坐标
bbox_pt_list = list(itertools.product(*bounds_list))
bbox_pt_vec = o3d.utility.Vector3dVector(bbox_pt_list) # list
bbox = o3d.geometry.AxisAlignedBoundingBox.create_from_points(bbox_pt_vec)# 3. crop
pcd_cropped = pcd.crop(bbox)# 4. display
# Flip the pointclouds, otherwise they will be upside down.
pcd_cropped.transform([[1, 0, 0, 0], [0, -1, 0, 0], [0, 0, -1, 0], [0, 0, 0, 1]])
o3d.visualization.draw(pcd_cropped)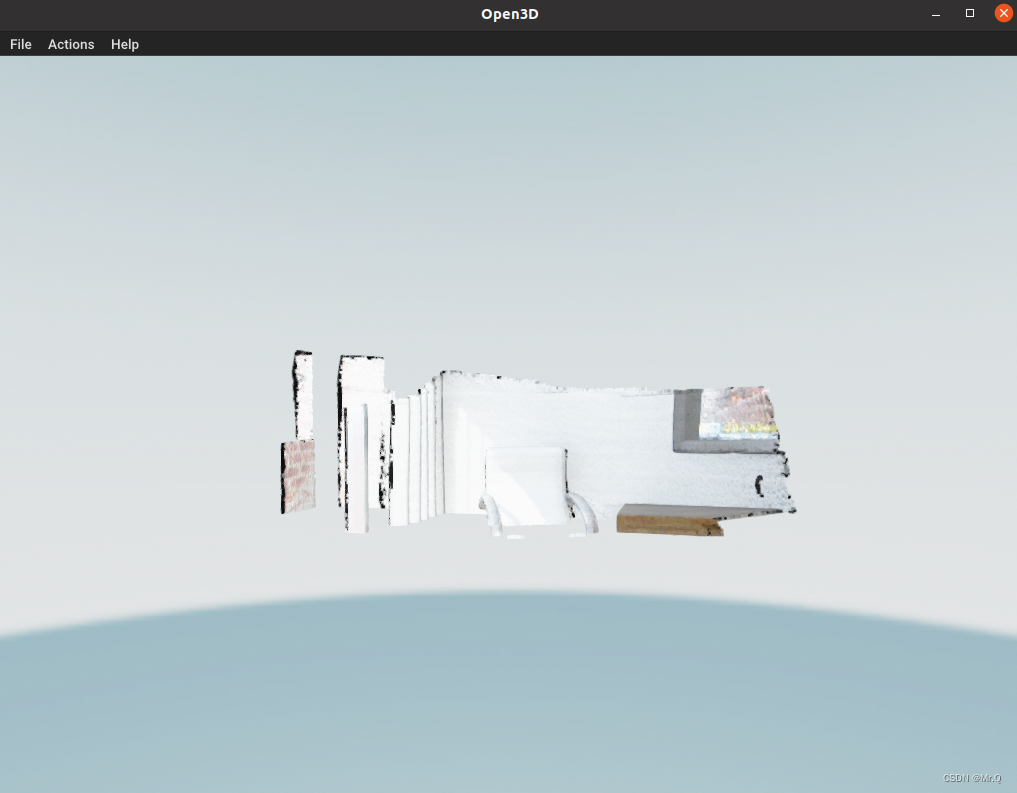
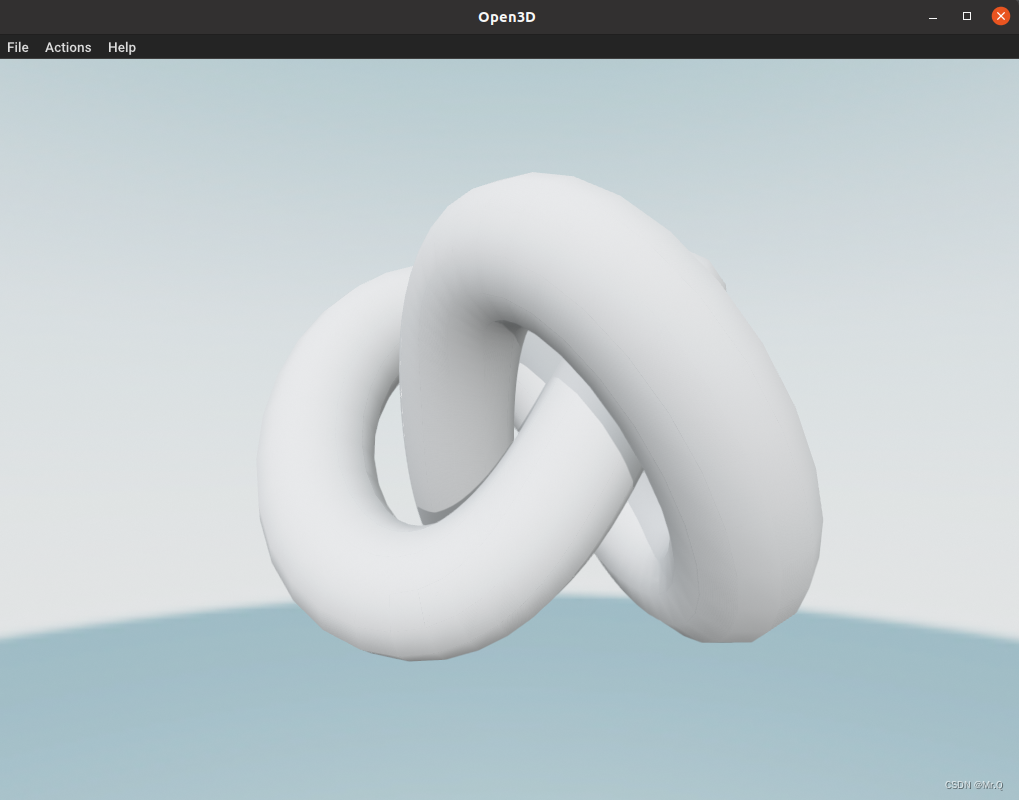
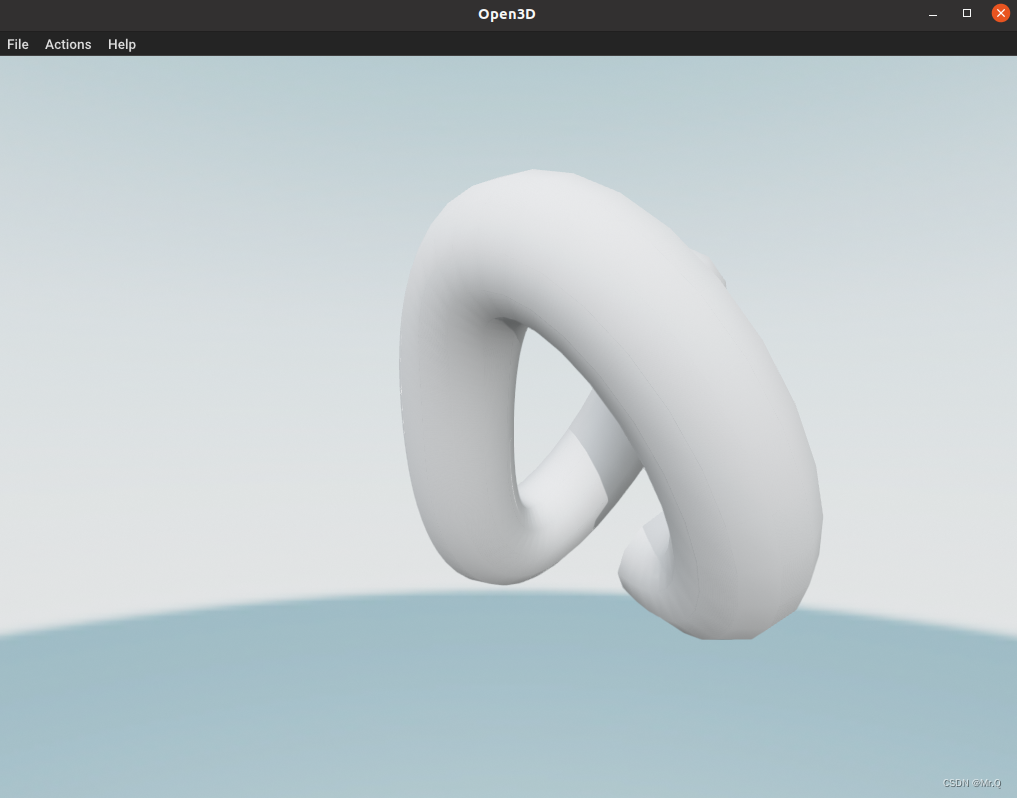
3. crop_mesh
上面是裁剪PointCloud,这里裁剪TriangleMesh.
转成numpy,修改mesh的traingles和triangle_normals成员。
import open3d as o3d
import numpy as np
import copyif __name__ == "__main__":# 1. read meshknot_mesh = o3d.data.KnotMesh()mesh = o3d.io.read_triangle_mesh(knot_mesh.path)mesh.compute_vertex_normals()print("Displaying original mesh ...")o3d.visualization.draw([mesh])# 2. crop: triangles and triangle_normalsprint("Displaying mesh of only the first half triangles ...")mesh_cropped = copy.deepcopy(mesh) # mesh_cropped.triangles. (num, 3)mesh_cropped.triangles = o3d.utility.Vector3iVector( # trianglesnp.asarray(mesh_cropped.triangles)[:len(mesh_cropped.triangles) // 2, :])mesh_cropped.triangle_normals = o3d.utility.Vector3dVector( # triangle_normalsnp.asarray(mesh_cropped.triangle_normals)[:len(mesh_cropped.triangle_normals) // 2, :])print(mesh_cropped.triangles)o3d.visualization.draw([mesh_cropped])