基于深度学习CenterPoint的3D目标检测部署实战
1.所用硬件
硬件:英伟达 Jetson AGX
环境:ubuntu 20.04
2.安装依赖
CUDA Toolkit: 11.4
python: 3.8
numpy: 1.23.1
pytorch: 2.0.0
ros: notic
rospkg
ros_numpy: (sudo apt-get install ros-$ros_release-ros-numpy)
pyyaml
argparse
2.拉取代码
git clone https://gitee.com/uuuu_qqq/livox_detection.gitcd livox_detectionpython3 setup.py develop
3.解决部署过程遇到的bug
3.1 EasyInstallDeprecationWarning: easy_install command is deprecated.
解决EasyInstallDeprecationWarning: easy_install command is deprecated.
3.2 torch cuda版本安装
NVIDIA 优化框架:Jetson 平台 PyTorch 安装指南
3. 3 ModuleNotFoundError: No module named ‘ros_numpy‘
sudo apt-get install ros-noetic-ros-numpy
遇到下面问题:
http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/pool/main/r/ros-noetic-ros-numpy/ros-noetic-ros-numpy_0.0.5-2focal.20250510.062009_arm64.debE: Unable to fetch some archives, maybe run apt-get update or try with --fix-missing?于是直接复制下载链接,到官网下载,然后本地安装:
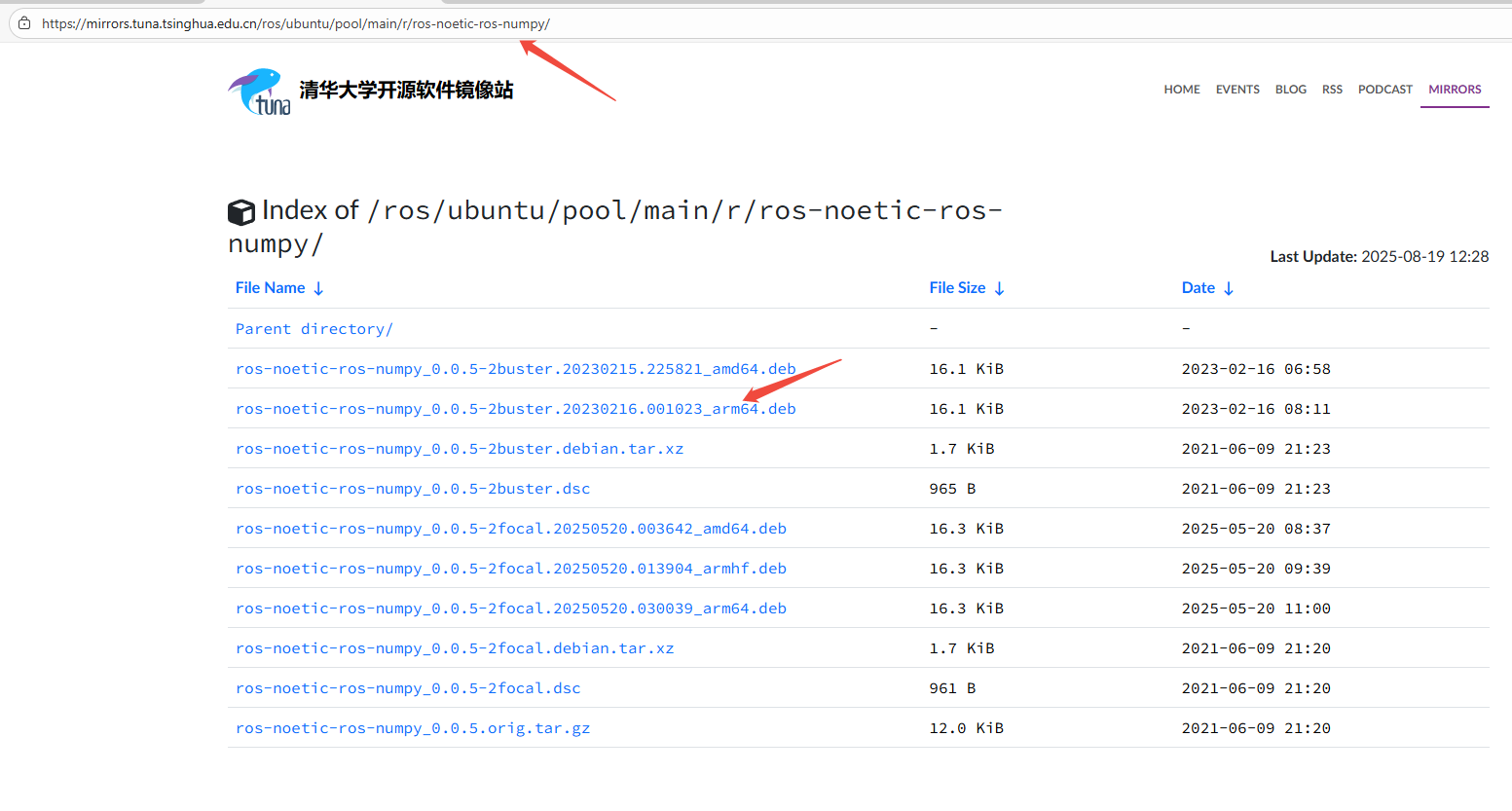
sudo dpkg -i ros-noetic-ros-numpy_0.0.5-xxxxx_arm64.deb
3. 4 AttributeError: module ‘numpy’ has no attribute ‘float’.
raise AttributeError(__former_attrs__[attr])
AttributeError: module 'numpy' has no attribute 'float'.
`np.float` was a deprecated alias for the builtin `float`. To avoid this error in existing code, use `float` by itself. Doing this will not modify any behavior and is safe. If you specifically wanted the numpy scalar type, use `np.float64` here.
只需要找到对应代码,把np.float改为float或者np.int改为int;
4.开始执行
-
运行 ROS.
roscore -
进入 ‘tools’ 目录并运行 test_ros.py(预训练模型:…/pt/livox_model_1.pt 或 …/pt/livox_model_2.pt)
cd tools python3 test_ros.py --pt ../pt/livox_model_1.pt -
播放rosbag。 (pointcloud 2的主题应该是/livox/lidar,或者自己在代码里改一下,直接接雷达数据也可以,话题类型要一致)
rosbag play [bag path] -
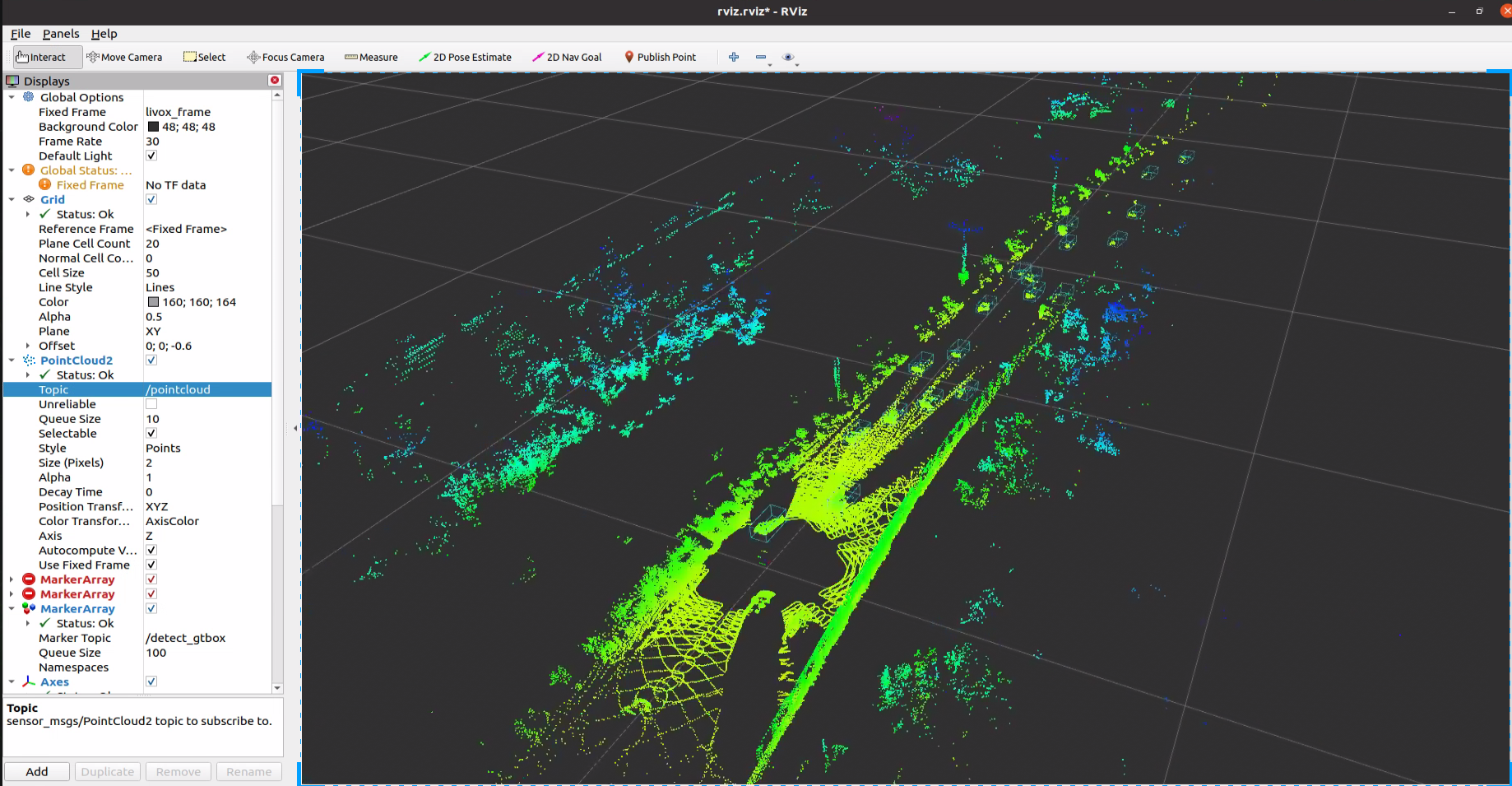
rviz可视化.
rviz -d rviz.rviz