【数据结构】快速排序算法精髓解析
1.快速排序
1.1Hoare 版本
快速排序是 Hoare 于 1962 年提出的一种二叉树结构的交换排序方法,其基本思想为:任取待排序元素序列中
的某元素作为基准值,按照该排序码将待排序集合分割成两子序列,左子序列中所有元素均小于基准值,右子序列中所有元素均大于基准值,然后最左右子序列重复该过程,直到所有元素都排列在相应位置上为止。
下面我们先理解快速排序排一趟的过程:
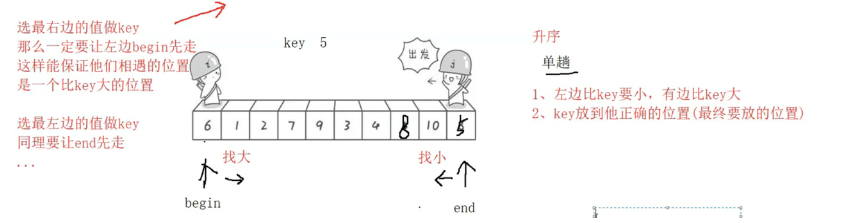
如果选择最右边的值让右边的 end 先走
选择最右边的值作为 key 需要 begin 先走,不然排序会出问题
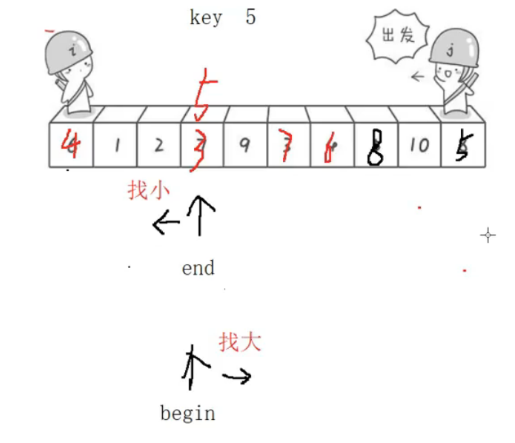
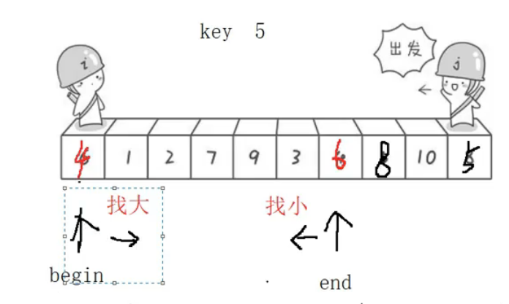
找大是找一个比基准值 key 大的数,第一个数是 6 比 5 大,end 找到比基准值小的数 4 时,将 4 和 6 交换
到达中间位置时将中间数据和 key 交换
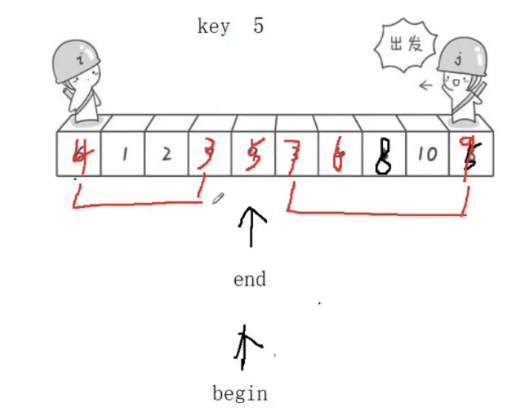
一趟我们就可以把一个数组分成三个部分比 key 小的子数组,key,比 key 大的子数组
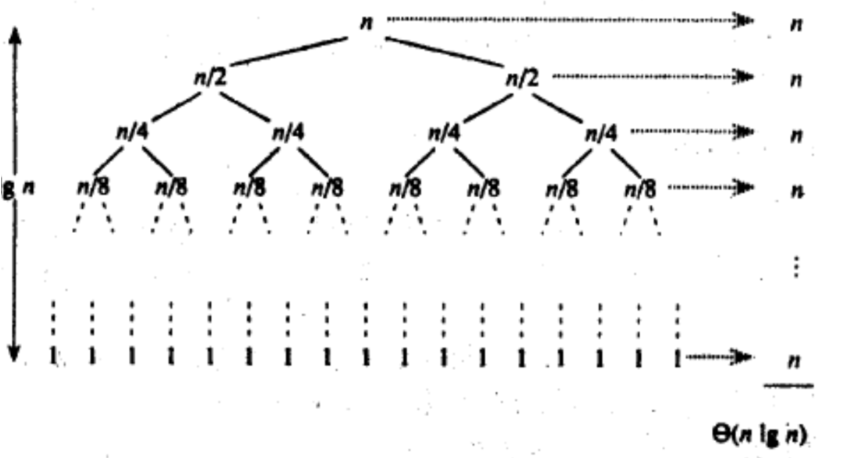
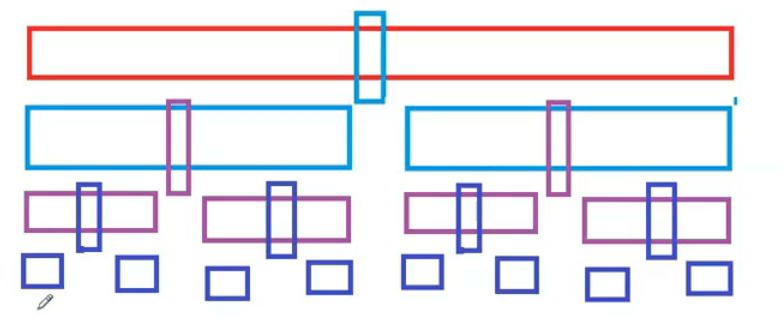
如果要将一个数组排成升序,我们可以利用递归的思想,不断进行单趟,直到 key 的左右只有一个数据的时候,整个数组就都有序了;(下图是理想的划分情况,key 处于正中间的位置,实际情况 key 可能不在正中间位置,但是不影响我们递归实现,只要 key 左边的数都比 key 小,右边的都比 key 大就行)
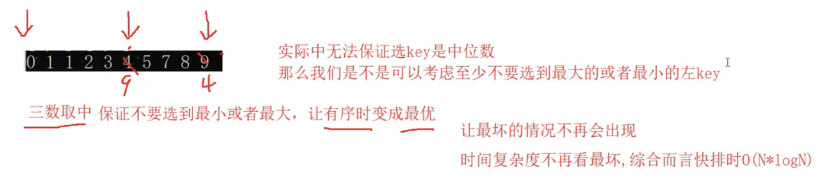
加上三数取中后可以避免快速排序的缺陷(即 key 取到最大或最小)
// 快速排序递归实现
// 快速排序hoare版本
//时间复杂度:O(N*logN-N^2)// 三数取中:确定中间值索引后只做一次交换
void GetMid(int* a, int begin, int end)
{int mid = begin + (end - begin) / 2; // 计算中间索引// 比较三个值,确定中间值的索引,无需实际排序if ((a[begin] <= a[mid] && a[mid] <= a[end]) ||(a[end] <= a[mid] && a[mid] <= a[begin])){// mid是中间值,交换mid和endswap(&a[mid], &a[end]);}else if ((a[mid] <= a[begin] && a[begin] <= a[end]) ||(a[end] <= a[begin] && a[begin] <= a[mid])){// begin是中间值,交换begin和endswap(&a[begin], &a[end]);}// 若end是中间值,则无需交换(本身就在end位置)
}//最坏的情况是key每次都取到最大或最小的数,可以加入三数取中避免
int PartSort1(int* a, int begin, int end)
{GetMid(a, begin, end);int keystatue = end;while (begin < end){//当begin和end相遇就停下while (begin < end && a[keystatue] >= a[begin]){begin++;}while (begin < end && a[keystatue] <= a[end]){end--;}swap(&a[begin], &a[end]);}swap(&a[begin], &a[keystatue]);return begin;
}void QuickSort1(int* a, int left, int right)
{assert(a);if (left >= right)return;int div = PartSort1(a, left, right);QuickSort1(a, left, div - 1);QuickSort1(a, div + 1, right);
}1.2快速排序(挖坑法)
性能上和 Hoare 版本的快速排序没什么区别,只是实现方法有所差异
实现的步骤
Step 1:选基准值,挖第一个坑
用三数取中法(GetMid)从 a[begin]、a[mid]、a[end] 中选中间值,交换到 end 位置(作为基准值)。
记录基准值 key = a[end],此时 end 位置成为第一个 “坑”(需要被填充)。
Step 2:左指针找大值,填右坑
左指针 begin 从左向右遍历,找到第一个 大于 key 的元素(a[begin] > key)。
将该元素填入当前的 “坑”(初始是 end 位置),即 a[end] = a[begin]。
此时 begin 位置变成新的 “坑”(因为元素被移走了)。
Step 3:右指针找小值,填左坑
右指针 end 从右向左遍历,找到第一个 小于 key 的元素(a[end] < key)。
将该元素填入当前的 “坑”(上一步的 begin 位置),即 a[begin] = a[end]。
此时 end 位置变成新的 “坑”。
Step 4:重复填坑,直到指针相遇
循环执行 Step 2 和 Step 3,不断移动 begin 和 end,直到 begin == end(两指针相遇)。
此时相遇的位置就是基准值 key 的最终位置,将 key 填入该位置(a[begin] = key)。
//挖坑法
int PartSort2(int* a, int begin, int end)
{GetMid(a, begin, end);int key = a[end];while (begin < end){while (begin < end && a[begin] <= key){begin++;}a[end] = a[begin];while (begin < end && a[end] >= key){end--;}a[begin] = a[end];}a[begin] = key;return begin;
}1.3快速排序(前后指针法)
这里我key选end下标的数据,cur指针开始指向待排序列的头,prev指向cur的前一个位置
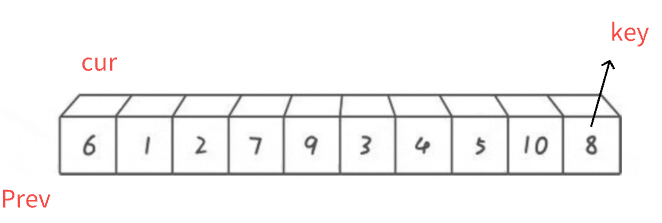
当cur遇到比key小的数,prev++,交换cur和prev的数据
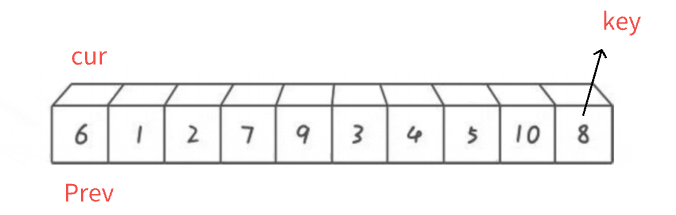
当cur遇到比key大的数时cur++,prev++和prev进行交换
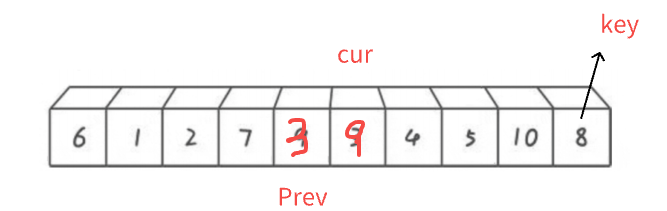
cur遇到比key小的数,prev++,交换cur和prev的数据
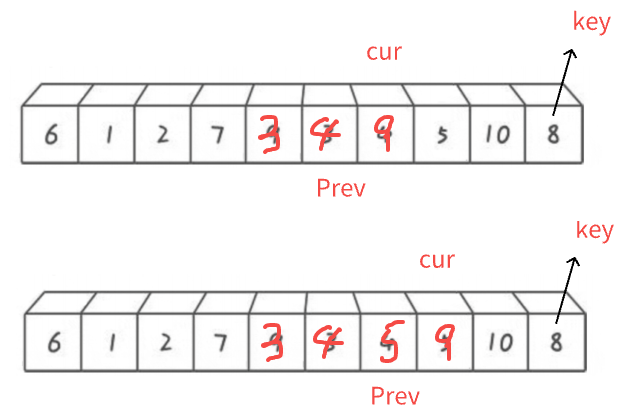
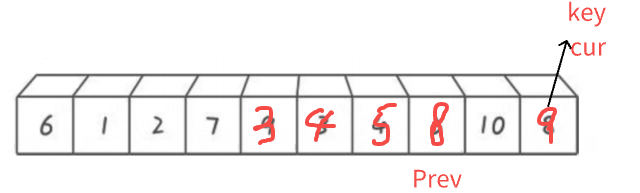
最后prev指针的数据左边比它小,右边比它大
1.初始化指针:
prev = begin - 1:初始时 “小于基准值区域” 为空,指向区域外。
cur = begin:从数组起始位置开始遍历。
keyindex = end:选最右元素作为基准值(建议先用三数取中优化)。
2.遍历与分区:
当cur < end(未遍历到基准值):
若a[cur] < 基准值:prev++(扩大 “小于区域”),交换a[prev]和a[cur](将当前元素 加入小于区域)。 无论是否交换,cur++(继续遍历下一个元素)。
3.放置基准值:
遍历结束后,prev指向 “小于区域” 的最后一个元素,prev + 1是基准值的正确位置。
交换prev + 1与keyindex(基准值位置),此时基准值左边全小于它,右边全大于等于 它。
4.返回基准值位置:prev + 1(即prev自增后的值)。
// 前后指针法分区函数
int PartSort3(int* a, int begin, int end)
{// 三数取中优化(可选,建议加上)GetMid(a, begin, end);int keyindex = end; // 基准值索引(选end位置元素)int prev = begin - 1; // 前指针:指向小于基准值区域的最后一个元素int cur = begin; // 后指针:遍历数组找小于基准值的元素// 遍历到基准值前一个位置即可while (cur < end){// 若当前元素小于基准值,扩展小于区域if (a[cur] < a[keyindex]){prev++; // 前指针右移(扩大小于区域)swap(&a[prev], &a[cur]); // 交换到小于区域}// 无论是否交换,后指针都要右移(继续遍历)cur++;}// 最后将基准值放到小于区域的后面(prev+1)prev++;swap(&a[prev], &a[keyindex]);return prev; // 返回基准值最终位置
}2.快速排序非递归实现
递归最大的缺陷是如果栈帧的深度太深,可能会导致栈溢出
创建栈并初始化(StackInit)。
将整个数组的左右边界[left, right]入栈(注意栈是 “后进先出”,先推右边界,再推左边界)。
循环处理:栈非空时持续分割区间
关键:每次从栈中取出一个区间,用PartSort3(前后指针法)分区,确定基准值的最终位置div,将区间一分为二。
子区间入栈:处理未排序的部分
分区后,需判断左右子区间是否需要继续排序(长度 > 1 时才需要),并将有效子区间入栈
逻辑:子区间长度≤1 时(div+1 >= end 或 begin >= div-1),已天然有序,无需入栈。
当栈为空时,所有区间均已处理(均为有序的小区间),排序完成。
最后销毁栈(StackDestroy),释放资源。
“栈存区间→出栈分区→有效子区间入栈→循环至栈空”,通过栈模拟递归的 “先分右、再分左” 的处理顺序,最终实现整个数组有序。
// 快速排序非递归实现
void QuickSortNonR(int* a, int left,int right)
{ST st;StackInit(&st);StackPush(&st, right);StackPush(&st, left);while (!StackEmpty(&st)) {// 出栈获取当前待处理区间[begin, end]int begin = StackTop(&st); StackPop(&st); // 先出左边界int end = StackTop(&st); StackPop(&st); // 再出右边界// 核心:分区操作(前后指针法)int div = PartSort3(a, begin, end); // 得到基准值位置div// 此时数组分为:[begin, div-1](≤基准值) 和 [div+1, end](≥基准值)// 右子区间[div+1, end]入栈(若长度>1)if (div + 1 < end) {StackPush(&st, end); // 先推右边界StackPush(&st, div + 1); // 再推左边界}// 左子区间[begin, div-1]入栈(若长度>1)if (begin < div - 1) {StackPush(&st, div - 1); // 先推右边界StackPush(&st, begin); // 再推左边界}StackDestroy(&st);}快速排序的特性总结:
快速排序整体的综合性能和使用场景都是比较好的,所以才敢叫快速排序
时间复杂度:O(N*logN)