无人机感知系统详解
感知模式要点
1. 主动传感模式
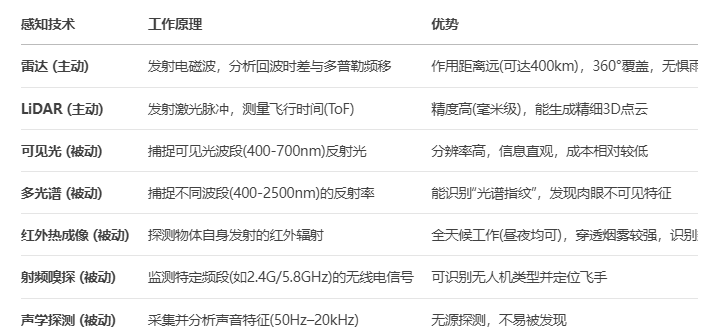
雷达探测:通过发射Ka/Ku波段的电磁波并分析回波时差与多普勒频移,来计算目标的距离、速度及航向。这种方式支持360°广域扫描,最远探测距离甚至可达400公里,对于雷达反射面积仅0.01m²的超微型无人机,识别精度也能达到0.5米。
- 激光测距(LiDAR):通过发射激光脉冲并接收反射信号,能精确计算目标的距离、方位与反射强度,其原理基于激光的飞行时间(ToF)。无人机搭载的激光雷达通常采用1550nm波段(人眼安全),扫描频率可达200Hz,单秒可生成百万级点云数据。在电力巡检中,通过点云数据可测量杆塔倾斜度(精度±0.1°)、横担变形量(误差<2mm)。
2. 被动传感模式
光学传感器:
可见光相机:采用1英寸大底CMOS传感器(像素≥2000万),配合变焦镜头,可实现1cm级地面目标的清晰成像。例如在电力巡检中,能识别绝缘子串瓷片长度≥2mm的裂纹。
多光谱相机:覆盖了可见光、近红外、短波红外等400-2500nm的宽光谱范围。通过分析目标在不同波段的反射率差异,能识别人眼无法察觉的“光谱指纹”。例如,罂粟苗在近红外波段的反射率比普通作物低15%-20%,借此可精准区分。
红外热成像仪:其原理是基于普朗克黑体辐射定律——任何温度高于绝对零度的物体都会向外发射红外辐射。现代无人机搭载的红外热成像仪热灵敏度(NETD)≤50mK,意味着可识别0.05℃的温度差异。在100米高度能精准定位0.5平方米的异常热源。例如电力设备中接头松动可能导致局部温度比环境高20-50℃。
射频信号嗅探:监测2.4GHz/5.8GHz等通信频段,用于识别无人机遥控链路特征,并定位操控者位置。
声纹采集:通过捕捉螺旋桨噪声频谱(50Hz–20kHz),并匹配声学数据库,实现无源探测。
气体传感器:针对化工、燃气等特殊场景,可搭载电化学、半导体或光离子化(PID)传感器。例如激光光谱传感器(如TDLAS)可检测0.1ppm级(百万分之一)的甲烷泄漏。
3. 智能决策与响应
多传感器融合:这不是简单的数据叠加,而是通过卡尔曼滤波等先进算法,将雷达(远距广域)、光电(视觉确认)、射频(信号定位)、红外(夜间增强)等不同来源的数据进行协同处理,旨在降低虚警率。
智能识别算法:
微多普勒分析:能够识别旋翼旋转的独特特征,从而有效区分无人机与鸟类,准确率可超过90%。
深度学习模型:采用CNN(卷积神经网络)分类可见光/红外图像,使用GRU/LSTM等网络处理时序信号(如声纹)。
分级反制策略:感知到威胁后,系统可采取分层级的响应措施,例如初级警告(无线电驱离)→ 中级干扰(GPS欺骗)→ 高级毁伤(激光熔毁),响应时间通常<5秒。高功率脉冲激光器能在650米距离内瞬间熔毁无人机的电池组或飞控主板。
技术难点
1. 复杂环境适应性:
电磁干扰:城市环境中常见的多径效应会显著降低定位精度,通常需要空时自适应处理(STAP)等高级技术来抑制杂波。
气象影响:雨雾等恶劣天气会衰减雷达信号,红外传感也容易受到日光干扰。解决这些问题往往需要多源数据互补校正。
复杂光照影响:在眩光和阴影等光照明暗变化的复杂光照场景下,纯视觉SLAM技术会因图像纹理不清晰和特征点丢失导致位姿估计漂移甚至定位失败。
2. 静默无人机探测:对于无射频发射、采用自主飞行的无人机(即“非合作目标”),传统的信号监测手段失效,必须依赖雷达微动特征识别或高分辨率红外热成像技术。
3. 多目标处理能力:当需要同时追踪的目标数量超过150个时,算力需求会剧增。这通常需要通过边缘计算进行本地化处理,并要求响应时间≤5秒。
4. 超低空盲区:地面杂波会严重干扰雷达对近地目标的探测。优化这一问题需要改进脉冲压缩技术与扩展俯仰扫描范围(例如达到-20°~90°)。
5. 感知与计算的平衡:无人机机载计算资源和能源极其有限。高精度感知算法(如基于深度学习的模型)通常计算量大,对实时处理和小型化、低功耗嵌入式计算平台提出了严峻挑战。
6. 动态目标跟踪稳定性:在无人机(UAV)录制的视频中,频繁的视角变化和复杂的无人机-地面相对运动动力学带来了重大挑战,这通常导致不稳定的亲和力测量和模糊的关联,使得保持目标身份标识(ID)的连续性变得困难。
不同感知技术的特点与应用对比
作用点
1. 高精度定位与导航:
基于RGB-D相机的SLAM技术,通过对图像进行目标检测、剔除动态区域的特征点,并结合深度信息,可以有效克服传统GPS/INS系统在建筑遮蔽场景下的定位漂移和误差高的问题,实现更精确的位姿估计和静态地图构建。
通过多模态传感器(LiDAR、视觉、毫米波雷达)融合构建的动态更新三维地图,能实现厘米级定位精度(例如动态障碍物识别率>92%)。
2. 动态目标感知与避障:
不仅能够检测动态目标,还能通过点云处理、欧式聚类和包围盒算法,精确计算动态目标的位置、大小和速度信息,为无人机在复杂城市环境中的避障提供关键数据支持。
外观-运动一致性(AMC)矩阵等算法通过联合利用外观和运动线索,显著提升了在复杂无人机视角下对多目标的鲁棒跟踪能力,减少身份切换和轨迹断裂。
3. 精细化巡检与监测:
在电力巡检中,可识别绝缘子串的瓷片裂纹(长度≥2mm)、金具锈蚀(面积≥50mm²)等缺陷;通过红外热成像检测变压器套管接头松动导致的异常发热(局部温度可比环境高20-50℃)。
在油气管道监测中,可检测因沉降、塌陷导致的管道弯曲;通过气体传感器检测0.1ppm级的甲烷泄漏或1ppm的硫化氢。
通过多机跨视角协同感知技术,例如动态交互匹配和局部-全局的多粒度匹配,可以有效弥补单机视角的不足,提升多机在复杂三维空间中的作业能力(多机协同跟踪的成功率可提升15.6%)。
4. 低空安全与管控:
通过融合5G-A、雷达、TDOA等多种感知数据,实现对低空合作目标(如注册无人机)和非合作目标(如“黑飞”无人机)的全方位精准监测,为低空经济“飞得好”、“管得住”提供解决方案。
通过分级反制策略,对非法入侵的无人机实施从警告到硬毁伤的有效处置,保障机场、军事基地、核电站等关键区域的安全。