C++排序算法学习笔记
文章目录
- 前言
- 1. 排序算法的选定标准
- 1.1 时空复杂度
- 1.2 稳定性
- 1.3 原地排序
- 2. 冒泡排序
- 3. 选择排序
- 4. 插入排序
- 5. 希尔排序
- 6. 快速排序
- 7. 归并排序
- 8. 堆排序
- 9. 基数排序
- 总结
- 三者在 STL 中的协同工作 (Introsort)
前言
在 C++ 中,快速排序、堆排序和插入排序是三种基础但特性迥异的排序算法。STL 的 std::sort 正是结合了三者的优点(Introsort)。以下是它们的详细实现和对比:
1. 排序算法的选定标准
1.1 时空复杂度
首先一个指标肯定是时间复杂度和空间复杂度。
对于任意一个算法,其时间复杂度和空间复杂度都是越小越好的。
1.2 稳定性
稳定性是排序算法的一个重要性质,我们可以简单总结为:
对于序列中的相同元素,如果排序之后它们的相对位置没有发生改变,则称该排序算法为「稳定排序」,反之则为「不稳定排序」。
如果单单排序 int 数组,那么稳定性没有什么意义。但如果排序一些结构比较复杂的数据,那么稳定排序就会有一定的优势。
如果你用稳定排序算法,那么排序完成后,相同用户 ID 的订单依然会按照交易日期有序排列:
Date UserID
2020-02-01 1001
2020-02-02 1001
2020-02-03 10012020-01-01 1002
2020-01-02 1002
2020-01-03 1002
...
因为之前已经按照日期排好序了,对用户 ID 稳定排序之后,相同用户 ID 的订单的相对位置保持不变,所以在日期上依然是有序的。
如果你用不稳定排序算法,相同用户 ID 的订单相对位置可能变化,所以对于相同用户 ID 的订单,交易日期的有序性会丧失,相当于你之前对日期的排序白做了。
可以看到,稳定性是个很重要的性质,所以你在使用排序算法时要特别注意,避免出现预期之外的结果。
1.3 原地排序
原地排序就是指排序过程中不需要额外的辅助空间,只需要常数级别的额外空间,直接操作原数组进行排序。
注意,关键是是否需要额外的空间,而不是是否返回一个新的数组。具体来说就是类似这样的区别:
// 非原地排序
void sort(int[] nums) {// 排序过程中需要额外的辅助数组,消耗 O(N) 的空间int[] tmp = new int[nums.length];// 对 nums 进行排序for ...
}// 原地排序
void sort(int[] nums) {// 直接操作 nums,不需要额外的辅助数组,消耗 O(1) 的空间for ...
}
不难想到,对于大数据量的排序,原地排序算法是比较有优势的。
2. 冒泡排序
冒泡排序(Bubble Sort)是一种简单且直观的排序算法。它通过重复地遍历要排序的列表,一次比较两个相邻的元素并交换它们的位置来排序列表。这个过程会一直重复,直到列表变得有序为止。由于每次遍历列表时最大的元素会“冒泡”到列表的末端,故称为冒泡排序。
关于冒泡排序的详细过程如下(按照升序描述):
- 从列表的第一个元素开始,依次比较相邻的两个元素。
- 如果前一个元素比后一个元素大,则交换它们的位置。
- 继续向后比较,直到列表的末尾。这时,最大的元素被放置到列表的末尾。
- 重新从列表的第一个元素开始,重复上述过程,但不再处理已排序的最后一个元素。
持续重复步骤 1-4,直到没有需要交换的元素,表示列表已完成排序。
#include <iostream>
#include <vector>
using namespace std;// 升序
void bubbleSort(vector<int>& vec)
{int size = vec.size();bool swapped = false;for (int i = 0; i < size - 1; ++i){swapped = false;for (int j = 0; j < size - i - 1; ++j){if (vec[j] > vec[j + 1]){swap(vec[j], vec[j + 1]); // 交换swapped = true;}}if (!swapped){break; // 提前结束排序}}
}int main()
{srand(time(NULL));vector<int> data;cout << "排序前的原始数据: ";for (int i = 0; i < 10; ++i){data.push_back(rand() % 100);cout << data.back() << " ";}cout << endl;bubbleSort(data);cout << "排序之后的数据: ";for (const auto& item : data){cout << item << " ";}cout << endl;return 0;
}冒泡排序的时间复杂度取决于输入数组的初始状态:
- 最坏情况下:每次遍历都需要进行比较和交换操作,因此时间复杂度为 O(n2)。
- 最优情况下:如果输入数组已经有序,只需进行一次遍历,时间复杂度为 O(n)。
- 平均情况下:每次遍历都需要进行部分比较和交换操作,时间复杂度为 O(n2)。
冒泡排序是一种稳定的排序算法。即相等的元素在排序后不会改变相对顺序。原因在于,当两个相邻的元素相等时,冒泡排序不会交换它们的位置,从而保持了相对顺序的稳定性。
3. 选择排序
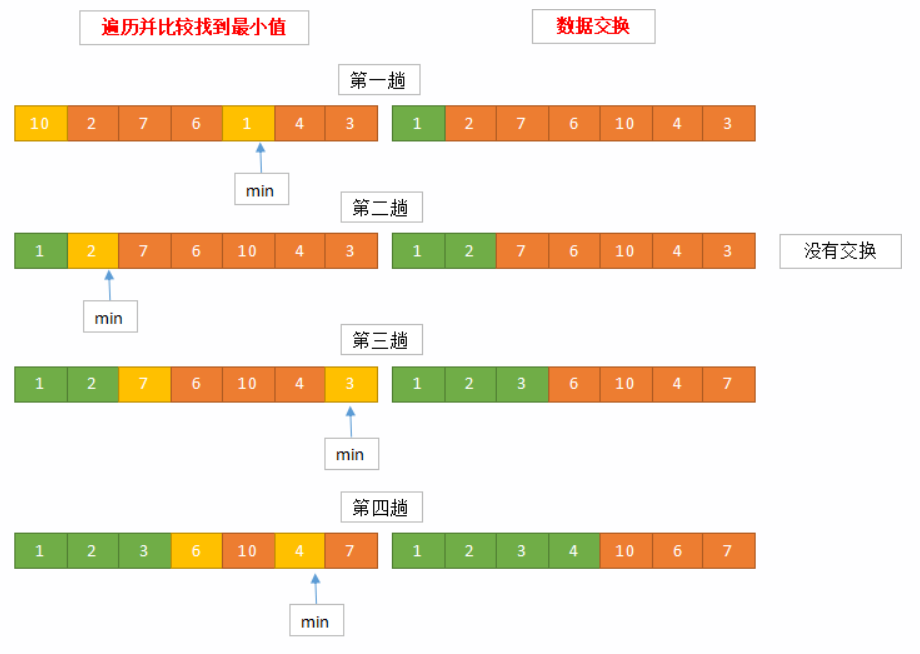
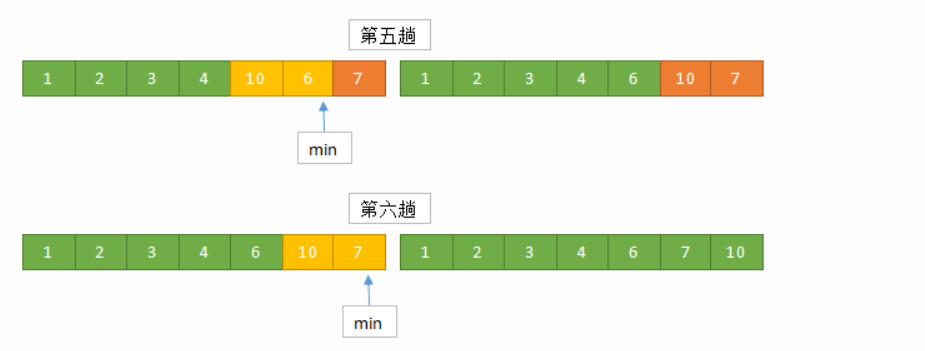
选择排序(Selection Sort)是一种简单直观的排序算法。其基本思想是每一次从待排序的数据元素中选出最小(或最大)的一个元素,存放在序列的起始位置,直到全部待排序的数据元素排完。虽然选择排序的时间复杂度较高,但其实现简单,适用于小规模数据的排序。
关于选择排序的具体步骤如下(按照升序描述):
初始状态:将整个序列分为已排序区间和未排序区间。初始时已排序区间为空,未排序区间为整个序列。
选择最小值:在未排序区间中找到最小的元素。
交换位置:将这个最小元素和未排序区间的第一个元素交换位置,使其成为已排序区间的最后一个元素。
重复步骤:重复步骤2和步骤3,直到未排序区间为空。
下面是使用C++编写的选择排序的示例代码:
#include <iostream>
#include <vector>
using namespace std;void selectionSort(vector<int>& vec)
{int size = vec.size();for (int i = 0; i < size - 1; ++i){int minPos = i; for (int j = i + 1; j < size; ++j){if (vec[j] < vec[minPos]) {minPos = j; }}if (minPos != i){swap(vec[i], vec[minPos]);}}
}int main()
{srand(time(NULL));vector<int> data;cout << "排序前的原始数据: ";for (int i = 0; i < 10; ++i){data.push_back(rand() % 100);cout << data.back() << " ";}cout << endl;selectionSort(data);cout << "排序之后的数据: ";for (const auto& item : data){cout << item << " ";}cout << endl;return 0;
}选择排序的时间复杂度不受输入数据的初始状态影响,始终为 O(n2)。具体分析如下:
- 最坏情况下:每次选择最小元素都需要遍历未排序部分的所有元素,因此时间复杂度为 O(n2)。
- 最优情况下:即使输入数据已经有序,选择排序仍需遍历所有元素,因此时间复杂度依旧为 O(n2)。
- 平均情况下:每次选择最小元素的操作与最坏情况类似,时间复杂度为 O(n2)。
选择排序是一种不稳定的排序算法。即相等的元素在排序后可能改变相对顺序。原因在于,当选择最小元素并进行交换时,可能会将相等元素的相对位置改变。例如,数组 [5, 3, 5, 2] 经过第一次选择后变为 [2, 3, 5, 5],两个 5 的相对顺序发生了改变。
4. 插入排序
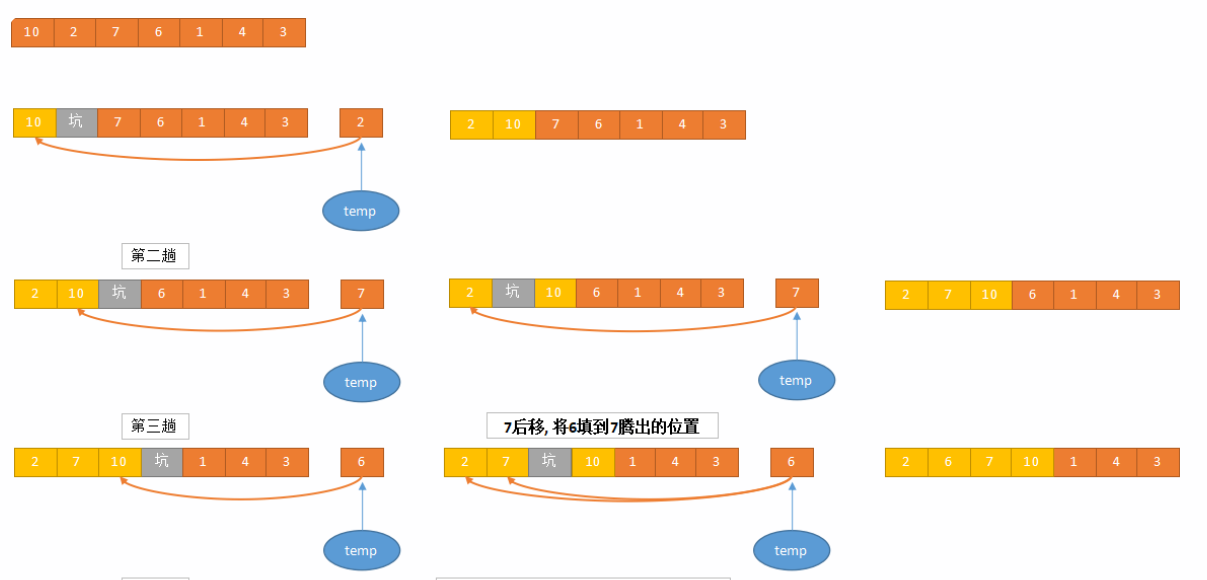
插入排序(Insertion Sort)是一种简单直观的排序算法。它的基本思想是将未排序部分的元素插入到已排序部分的适当位置,从而逐步构建有序列表。插入排序在小规模数据集和部分有序数据集上的表现较好,具有稳定性和简单性。
关于插入排序的具体步骤如下(按照升序描述):
- 初始化:从第二个元素(索引为1)开始,将其视为待插入元素。默认第一个元素是已经排好序的有序序列。
- 遍历:从未排序部分的第一个元素开始,逐一将每个元素插入到已排序部分的适当位置。
- 插入操作:
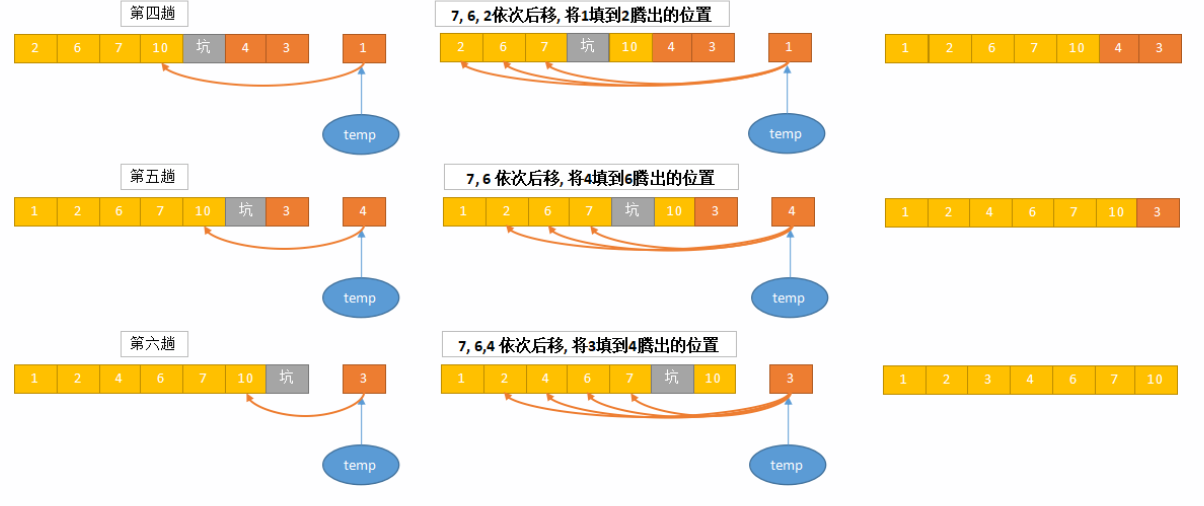
- 将当前元素(称为“待插入元素”)与已排序部分的元素从后向前进行比较。
- 如果已排序的元素大于待插入元素,则将该已排序元素向右移动一位。
- 重复上述比较和移动操作,直到找到一个已排序元素小于或等于待插入元素的位置。
- 将待插入元素插入到这个位置。
重复步骤2和步骤3,直到所有元素都排序完成。
下面是使用C++编写的插入排序的示例代码:
#include <iostream>
#include <vector>
using namespace std;void insertionSort(vector<int>& vec)
{int size = vec.size();for (int i = 1; i < size; ++i){int key = vec[i];int j = i - 1; while (j >= 0 && vec[j] > key){vec[j + 1] = vec[j];j--;}vec[j + 1] = key;}
}int main()
{srand(time(NULL));vector<int> data;cout << "排序前的原始数据: ";for (int i = 0; i < 10; ++i){data.push_back(rand() % 100);cout << data.back() << " ";}cout << endl;insertionSort(data);cout << "排序之后的数据: ";for (const auto& item : data){cout << item << " ";}cout << endl;return 0;
}
插入排序的时间复杂度取决于输入数组的初始状态:
- 最坏情况下:数组是反向排序的,需要进行最大次数的比较和移动操作,时间复杂度为 O(n2)。
- 最优情况下:数组已经有序,只需进行 n-1 次比较,时间复杂度为 O(n)。
- 平均情况下:需要进行部分比较和移动操作,时间复杂度为 O(n2)。
插入排序是一种稳定的排序算法。即相等的元素在排序后不会改变相对顺序。原因在于,当插入相等的元素时,只需插入到相等元素之后即可,不会改变其相对位置。
5. 希尔排序
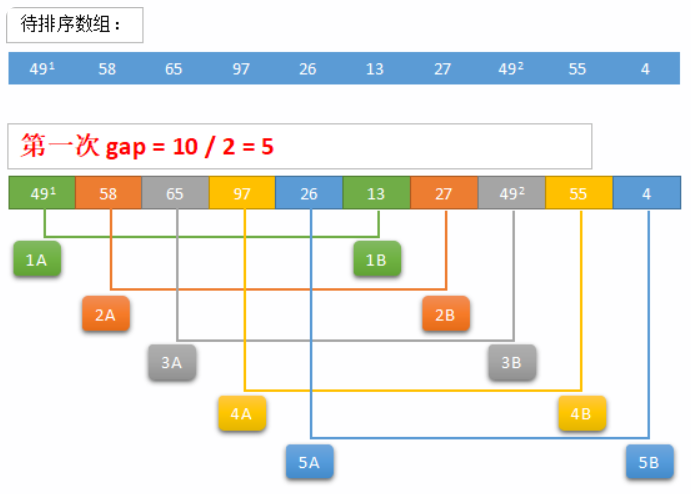
希尔排序(Shell Sort)是插入排序的一种改进版本,旨在提高插入排序在大规模数据集上的效率。它通过将数据集分割成多个子序列分别进行插入排序,逐步减少子序列的间隔,最终在整个序列上进行插入排序,从而减少数据移动的次数,提升排序效率。
关于希尔排序的具体步骤如下(按照升序描述):
- 选择初始增量序列:设置一个增量gap,常见的选择是初始增量为数组长度的一半,然后逐步减半,直到增量为1。也可以根据实际情况使用其他的增量(增量不同,排序的效率也不同)。
- 对每个增量进行排序:
- 分组:将数组分成多个子序列,子序列中的元素间隔为gap。
- 对子序列进行插入排序:对每个子序列进行插入排序。由于gap较大,子序列的长度较短,插入排序效率较高。
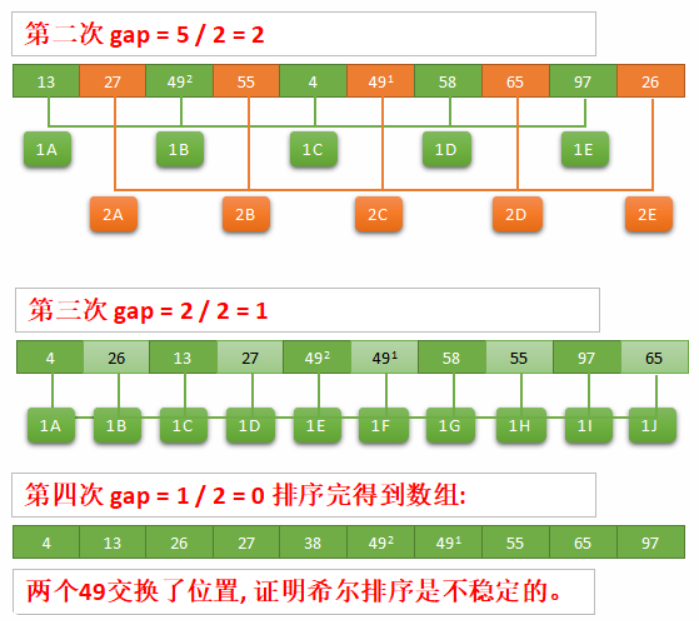
- 重复步骤2:减小增量,继续对每个减小后的增量进行排序,直到增量为1。增量为1时,整个数组就是一个整体,进行一次标准的插入排序。
下面是使用C++编写的希尔排序的示例代码:
#include <iostream>
#include <vector>
using namespace std;void shellSort(vector<int>& vec)
{int size = vec.size();for (int gap = size / 2; gap > 0; gap /= 2){for (int i = gap; i < size; ++i){int temp = vec[i];int j = i - gap;while (j >= 0 && vec[j] > temp){vec[j + gap] = vec[j];j -= gap;}vec[j + gap] = temp;}}
}int main()
{srand(time(NULL));vector<int> data;cout << "排序前的原始数据: ";for (int i = 0; i < 10; ++i){data.push_back(rand() % 100);cout << data.back() << " ";}cout << endl;shellSort(data);cout << "排序之后的数据: ";for (const auto& item : data){cout << item << " ";}cout << endl;return 0;
}
希尔排序的时间复杂度依赖于间隔序列的选择:
- 最坏情况下:时间复杂度O(n^2)。
- 最优情况下:时间复杂度为 O(n)。
- 平均情况下:时间复杂 O(n^1.3)。
希尔排序是一种不稳定的排序算法。即相等的元素在排序后可能改变相对顺序。原因在于当使用较大间隔进行交换时,相等元素的相对顺序可能会被打乱。
6. 快速排序
快速排序(Quick Sort)是一种高效的比较排序算法,由C.A.R. Hoare在1960年提出。快速排序采用分治策略,通过递归地将数组分割成子数组来实现排序。其平均时间复杂度为 O(n log n),在大多数情况下表现良好,因此在实际应用中广泛使用。
关于快速排序的具体步骤如下(按照升序描述):
- 选择基准:从数组中选择一个元素作为基准(pivot)。常见的选择方式是选择第一个元素、最后一个元素或者中间元素。
- 分区操作:将数组中小于基准的元素移到基准的左边,大于基准的元素移到基准的右边。
- 递归排序:递归地对基准左边和右边的子数组进行步骤1和步骤2的操作。
- 合并结果:当递归完成时,数组就变成了有序的。
下面是使用C++编写的快速排序的示例代码:
#include <iostream>
#include <vector>
using namespace std;void quickSort(vector<int>& vec, int left, int right)
{// 递归结束的条件if (left >= right){return;}int pivot = vec[(left + right) / 2];int begin = left - 1, end = right + 1;while (begin < end){// 先移动再判断do{begin++;} while (vec[begin] < pivot);do{end--;} while (vec[end] > pivot);if (begin < end){swap(vec[begin], vec[end]);}}quickSort(vec, left, end);quickSort(vec, end + 1, right);
}int main()
{srand(time(NULL));vector<int> data;cout << "排序前的原始数据: ";for (int i = 0; i < 10; ++i){data.push_back(rand() % 100);cout << data.back() << " ";}cout << endl;quickSort(data, 0, data.size() - 1);cout << "排序之后的数据: ";for (const auto& item : data){cout << item << " ";}cout << endl;return 0;
}快速排序的时间复杂度受基准选择的影响:
- 最坏情况下:如果每次选择的基准都是当前数组中的最小或最大值,则每次只能将一个元素放在正确的位置,时间复杂度为 O(n2)。这种情况在数组已经有序或逆序时可能出现。
- 最优情况下:每次选择的基准都能将数组平分,时间复杂度为 O(n log n)。
- 平均情况下:在多数情况下,快速排序的时间复杂度为 O(n log n)。
快速排序是一种不稳定的排序算法。即相等的元素在排序后可能改变相对顺序。原因在于分区操作中,可能会交换相等的元素,从而改变它们的相对位置。
7. 归并排序
归并排序(Merge Sort)是一种基于分治法的高效排序算法。它的基本思想是将数组分成两个子数组,分别进行排序,然后合并这两个有序子数组。归并排序的时间复杂度为 O(n log n),且具有稳定性,因此在实际应用中广泛使用。
关于归并排序的具体步骤如下(按照升序描述):
- 分割数组:
- 如果数组的长度大于1,将数组从中间分割成两部分。
- 对每一部分再递归进行分割,直到每个子数组的长度为1。
- 合并排序:
- 合并两个有序的子数组成一个有序的数组。
- 具体做法是比较两个子数组的第一个元素,将较小的元素放入合并结果中,并移到下一个元素,重复这个过程直到一个子数组为空,然后将另一个子数组剩下的元素全部放入合并结果中。
- 递归合并:
- 对每个子数组重复上述步骤,直到所有子数组合并为一个完整的有序数组。
下面是使用C++编写的归并排序的示例代码:
#include <iostream>
#include <vector>
using namespace std;void mergeSort(vector<int>& vec, int left, int right)
{if (left >= right){return;}int mid = (left + right) / 2;mergeSort(vec, left, mid);mergeSort(vec, mid + 1, right);int k = 0; int i = left, j = mid + 1;vector<int> tmp;while (i <= mid && j <= right){if (vec[i] <= vec[j]){tmp.push_back(vec[i++]);}else{tmp.push_back(vec[j++]);}}while (i <= mid){tmp.push_back(vec[i++]);}while (j <= right){tmp.push_back(vec[j++]);}for (i = left, k = 0; i <= right; ++i){vec[i] = tmp[k++];}
}int main()
{srand(time(NULL));vector<int> data;cout << "排序前的原始数据: ";for (int i = 0; i < 10; ++i){data.push_back(rand() % 100);cout << data.back() << " ";}cout << endl;mergeSort(data, 0, data.size() - 1);cout << "排序之后的数据: ";for (const auto& item : data){cout << item << " ";}cout << endl;return 0;
}
归并排序的时间复杂度可以通过递归方程来分析:
- 最坏情况下:归并排序的时间复杂度为 O(n log n),因为每次分割数组的操作都是对半分,递归深度为 log n,每层的合并操作时间复杂度为 O(n)。
- 最优情况下:时间复杂度同样为 O(n log n),因为归并排序的过程与数组的初始顺序无关,始终需要进行分割和合并操作。
- 平均情况下:归并排序的时间复杂度也是 O(n log n),因为它在任何情况下都需要进行相同数量的分割和合并操作。
8. 堆排序
堆排序(Heap Sort)是一种基于二叉堆数据结构的比较排序算法。堆排序利用堆这种数据结构的性质来实现排序,分为构建初始堆和反复从堆中取出最大元素(对于升序排序)两个主要步骤。堆排序的时间复杂度为 O(n log n),且不需要额外的内存空间,因此在实际应用中非常有效。
二叉堆其实就是一棵完全二叉树
下面是使用C++编写的堆排序的示例代码:
#include <iostream>
#include <vector>
using namespace std;void heapAdjust(vector<int>& vec, int len, int parent)
{int largest = parent;int left = 2 * parent + 1;int right = 2 * parent + 2;if (left < len && vec[left] > vec[largest]){largest = left;}if (right < len && vec[right] > vec[largest]){largest = right;}if (largest != parent){swap(vec[parent], vec[largest]);heapAdjust(vec, len, largest);}
}void heapSort(vector<int>& vec)
{int size = vec.size();for (int i = size / 2 - 1; i >= 0; --i){heapAdjust(vec, vec.size(), i);}for (int i = size - 1; i > 0; --i){swap(vec[0], vec[i]);heapAdjust(vec, i, 0);}
}int main()
{srand(time(NULL));vector<int> data;cout << "排序前的原始数据: ";for (int i = 0; i < 11; ++i){data.push_back(rand() % 100);cout << data.back() << " ";}cout << endl;heapSort(data);cout << "排序之后的数据: ";for (const auto& item : data){cout << item << " ";}cout << endl;return 0;
}堆排序的时间复杂度可以通过以下分析得出:
- 最坏情况下:构建最大堆的时间复杂度为 O(n),每次调整堆的时间复杂度为 O(log n),因此总时间复杂度为 O(n log n)。
- 最优情况下:时间复杂度同样为 O(n log n),因为无论数组初始状态如何,都需要进行构建堆和调整堆的操作。
- 平均情况下:堆排序的时间复杂度也是 O(n log n),与数组初始状态无关。
堆排序是一种不稳定的排序算法。即相等的元素在排序后可能改变相对顺序。原因在于堆的调整过程中,可能会交换相等元素的位置,从而改变它们的相对顺序。
9. 基数排序
基数排序(Radix Sort)是一种非比较排序算法,通过逐位处理数字来排序数组。它利用桶排序的思想,对数字的每一位进行排序,从最低有效位到最高有效位。基数排序特别适用于处理大量的整数或字符串数据。其时间复杂度为 O(d*(n+k)),其中 d 是数字的位数,n 是数组的长度,k 是基数【使用十进制,基数 ( k = 10 )】。
关于基数排序的具体步骤如下(按照升序描述):
- 确定排序的最大位数:
- 找出数组中最大数的位数 k,作为基数排序的迭代次数。
- 按每一位进行计数排序:
- 从最低位到最高位(从个位到最高位),对数组进行排序。
- 使用桶排序作为子过程,根据当前位的数值对元素进行排序。
- 根据数据的范围和分布创建若干个桶,每个桶负责一定范围内的数值。
- 根据每个元素的值,将其分配到对应的桶中
- 依次遍历每个桶,即完成了基于当前数字位的排序,并使用它覆盖原来的数据序列
- 使用新的数据序列进行下一轮的桶排序。
下面是使用C++编写的基数排序的示例代码:
#include <iostream>
#include <vector>
#include <string>
using namespace std;void radixSort(vector<int>& vec)
{int max = 0;for (int i = 0; i < vec.size(); ++i){if (max < vec[i]){max = vec[i];}}int len = to_string(max).length(); vector<vector<int>> bucket;int mod = 10, dev = 1;for (int i = 0; i < len; ++i, mod *= 10, dev *= 10){bucket.resize(10); // 有10个桶: 0~9for (int j = 0; j < vec.size(); ++j){int num = vec[j] % mod / dev;bucket[num].push_back(vec[j]);}int index = 0;for (const auto& item : bucket){for (const auto& it : item){vec[index++] = it;}}bucket.clear();}
}int main()
{srand(time(NULL));vector<int> data;cout << "排序前的原始数据: ";for (int i = 0; i < 10; ++i){data.push_back(rand() % 100);cout << data.back() << " ";}cout << endl;radixSort(data);cout << "排序之后的数据: ";for (const auto& item : data){cout << item << " ";}cout << endl;return 0;
}
基数排序的时间复杂度可以通过以下分析得出:
- 最坏情况下:时间复杂度为 O(d*(n+k)),其中 d 是最大数的位数,n 是数组的大小,k 是基数。
- 最优情况下:时间复杂度同样为 O(d*(n+k)),因为无论数组初始状态如何,都需要对每一位进行排序。
- 平均情况下:基数排序的时间复杂度也是 O(d*(n+k))。
总结
| 算法 | 平均时间复杂度 | 最好时间复杂度 | 最坏时间复杂度 | 空间复杂度 | 稳定性 |
|---|---|---|---|---|---|
| 冒泡排序 | O(n2) | O(n) | O(n2) | O(1) | 稳定 |
| 选择排序 | O(n2) | O(n2) | O(n2) | O(1) | 不稳定 |
| 插入排序 | O(n2) | O(n) | O(n2) | O(1) | 稳定 |
| 希尔排序 | O(n1.3) | O(n) | O(n2) | O(1) | 不稳定 |
| 快速排序 | O(n log n) | O(n log n) | O(n2) | O(log n) | 不稳定 |
| 归并排序 | O(n log n) | O(n log n) | O(n log n) | O(n) | 稳定 |
| 堆排序 | O(n log n) | O(n log n) | O(n log n) | O(1) | 不稳定 |
| 基数排序 | O(d*(n+k)) | O(d*(n+k)) | O(d*(n+k)) | O(n+k) | 稳定 |
三者在 STL 中的协同工作 (Introsort)
template <typename RandomIt>
void sort(RandomIt first, RandomIt last) {// 递归深度限制:2 * log2(n)const int depth_limit = 2 * log2(last - first);// 1. 内省排序主循环(快排+堆排)introsort(first, last, depth_limit);// 2. 最终插入排序(处理小数组)insertion_sort(first, last);
}void introsort(RandomIt first, RandomIt last, int depth) {// 小数组跳过if (last - first <= 16) return;// 深度超限转堆排序if (depth == 0) {heap_sort(first, last);return;}// 快排分区auto pivot = median_of_three(*first, *(first+(last-first)/2), *(last-1));auto [left, right] = partition(first, last, pivot);// 尾递归优化introsort(first, left, depth - 1);introsort(right, last, depth - 1);
}
算法对比表
| 特性 | 快速排序 | 堆排序 | 插入排序 |
|---|---|---|---|
| 时间复杂度 | 平均 O(n log n),最坏 O(n²) | 最坏 O(n log n) | 平均 O(n²),最佳 O(n) |
| 空间复杂度 | O(log n) 递归栈 | O(1) 原地 | O(1) 原地 |
| 稳定性 | 通常不稳定 | 不稳定 | 稳定 |
| 适用场景 | 通用大规模数据 | 需要最坏情况保证 | 小数据或基本有序数据 |
| 缓存友好性 | 中等(分区访问) | 差(跳转访问) | 优秀(顺序访问) |
| STL 使用场景 | 主要排序引擎 | 深度超限时使用 | 小数组最终排序 |
性能实测参考(10万 int 排序)
| 算法 | 随机数据(ms) | 升序数据(ms) | 降序数据(ms) |
|---|---|---|---|
| 快速排序 | 12 | 2100(退化) | 2200(退化) |
| 堆排序 | 25 | 24 | 26 |
| 插入排序 | >5000 | 2 | 4 |
| STL sort | 10 | 8 | 9 |
|注:STL 的 Introsort 在各类数据上都保持高效