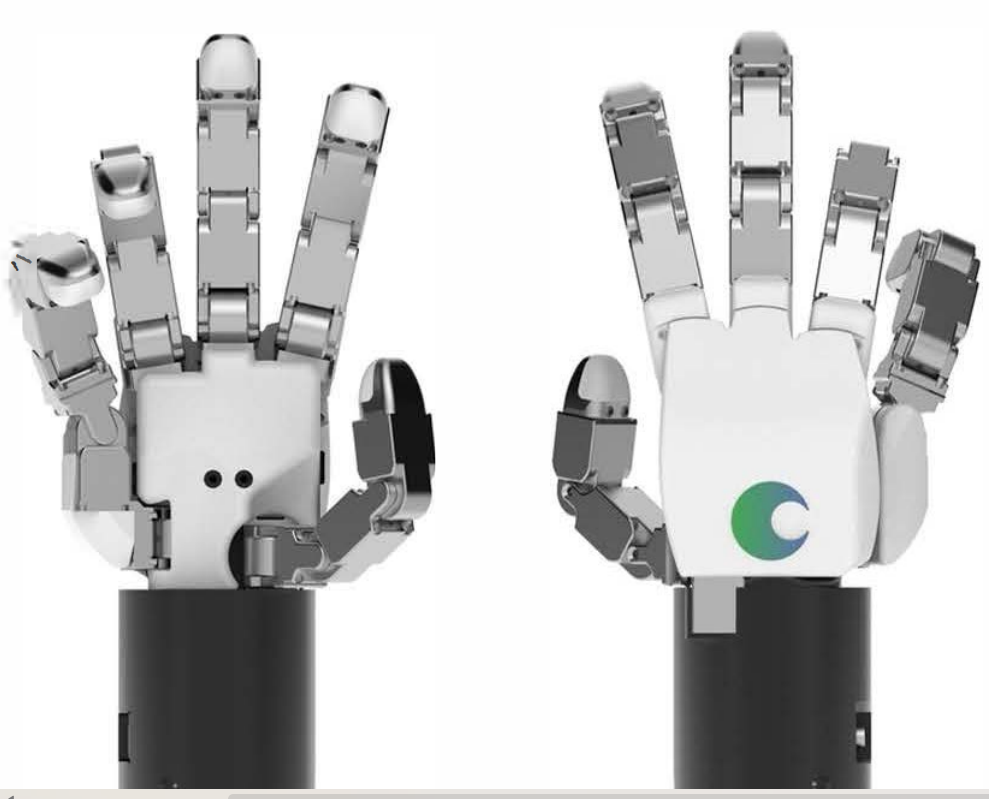
Tesollo DeltoGripper DG-5F具有抓握和操纵能力的灵巧手

仿人机器人研究
涉及工具使用、双手操作的任务
需要手动操作的过程,如物体组装和连接器锁紧
• 5指20自由度(DOF)
Gripper与人手一样通用,可广泛应用。
• 专为人形机器人研发而设计的多轴铰接式
机器人夹持器。
• 其支持Issac、MuJoCo和各种物理模拟模
式。
• 与ROS1和ROS2完全兼容,可无缝集成到任何机
器人生态系统中。
能够以人类般的精度执行任务
布料折叠 堆叠纸杯
项目组织 分离纸杯
等
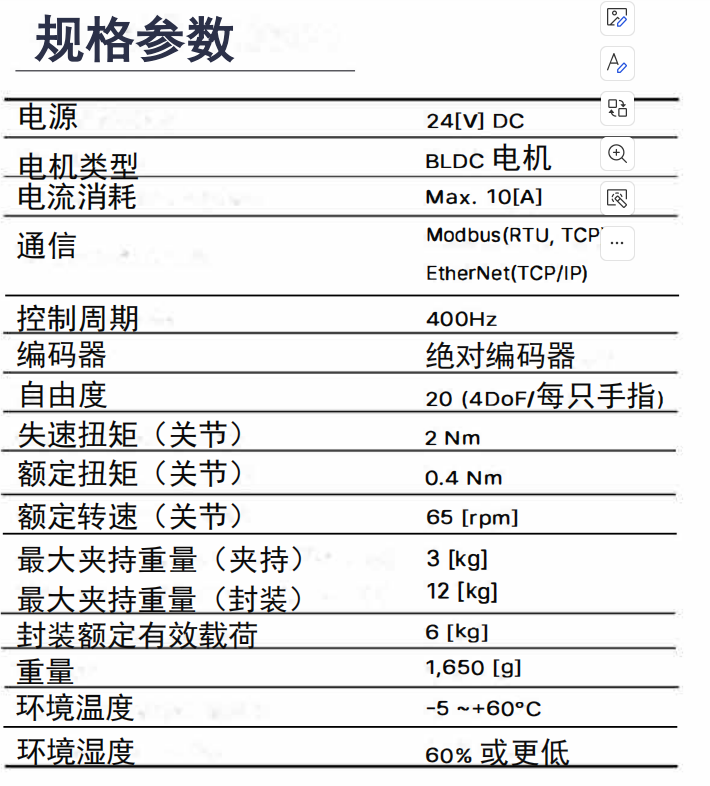
电源 24[V] DC
电机类型BLDC 电机
电流消耗 Max. 1O[A]
通信 Modbus(RTU, TCP)EtherNet(TCP/IP)
控制周期 400HZ
编码器 编码器
自由度 20 4dof/每只手指
失速扭矩(关节) 2NM
额定扭矩(关节) 0.4NM
额定转速(关节) 65 RPM
大夹持重量(夹持) 3KG
大夹持重量(封装) 12KG
封装额定有效载荷 6KG
重量 1650G
环境温度 -5 - 60度
环境湿度 60%或更低