同创物流学习记录2·电车
基本构造:

履带A 控制电车上的运输带运转
地面 右 控制电车右边的传送带运转(即从堆码机数第4段传送带)
地面 左 则是电车左边的传送带运转
状态
设置
电车设置
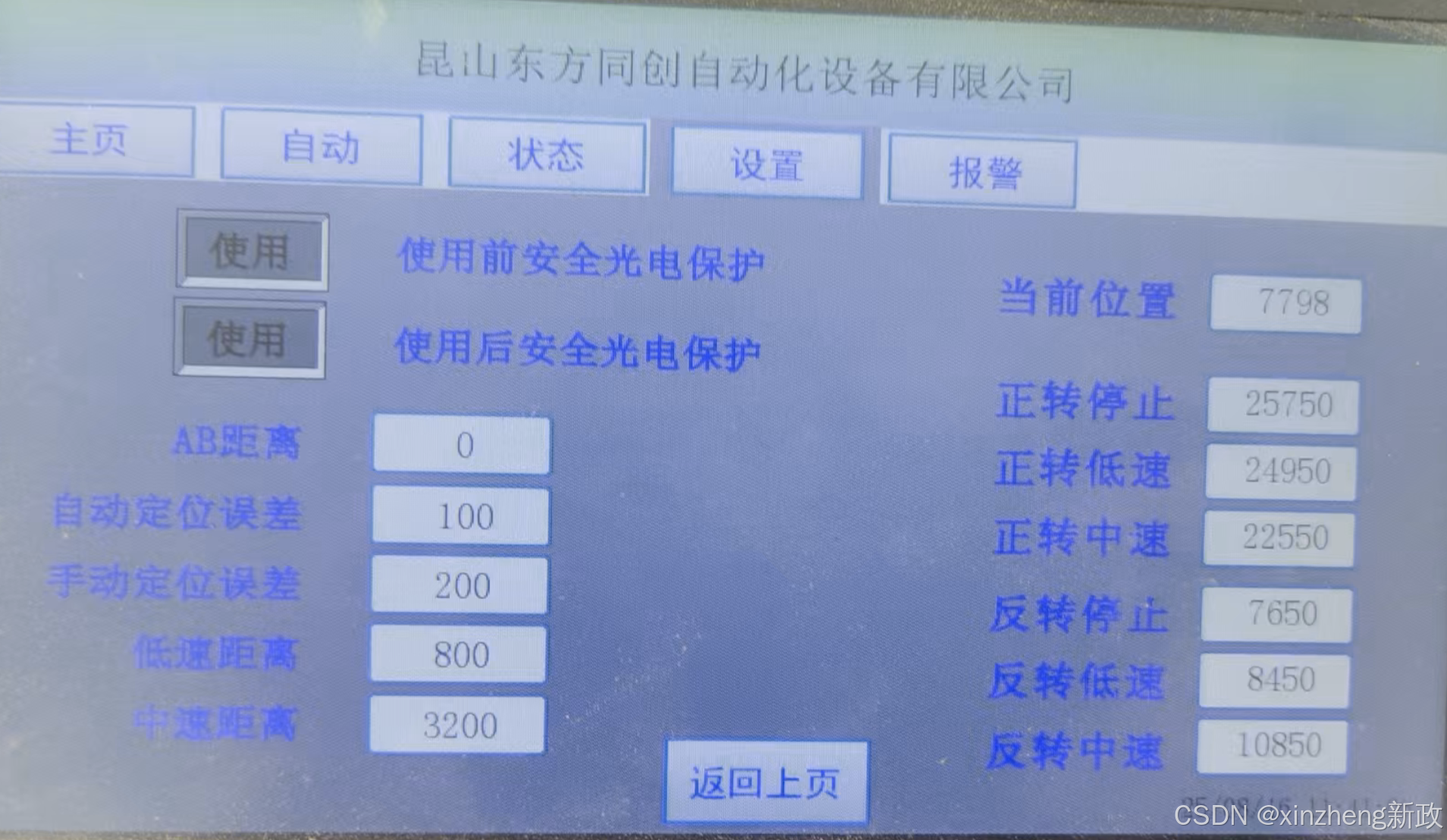
2025-8-16 因为第4段传送带 货物不送 电车,将自动定位误差 从80 调整为100, 手动定位误差从180 调整为 200.
运行流程:
#1 电车右侧即第4段传送带 有货物后, 在A定位完成后进行入货。
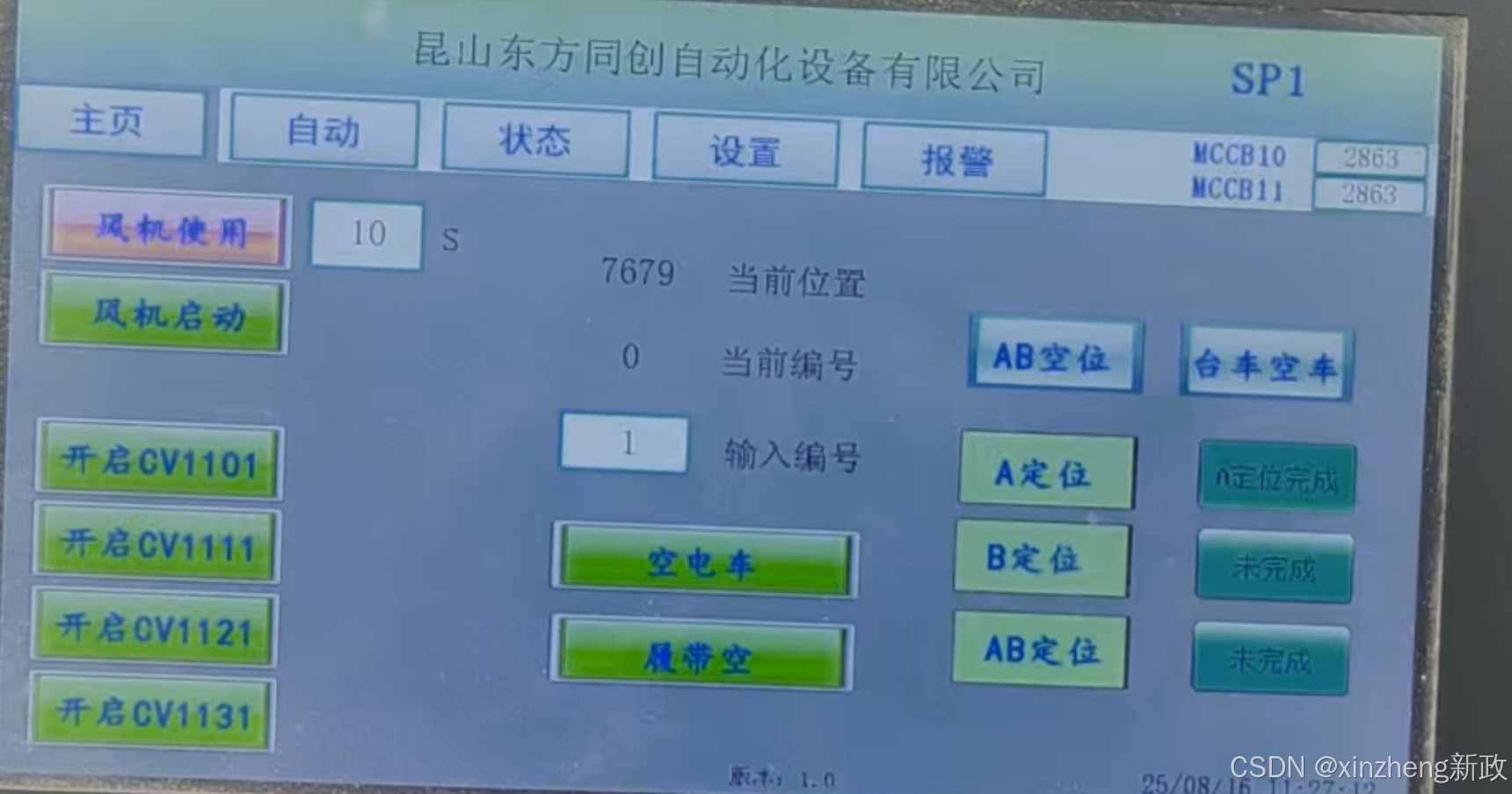
A定位 即 A代表 电车定位。
#2 入货完成后,光电感受到货物
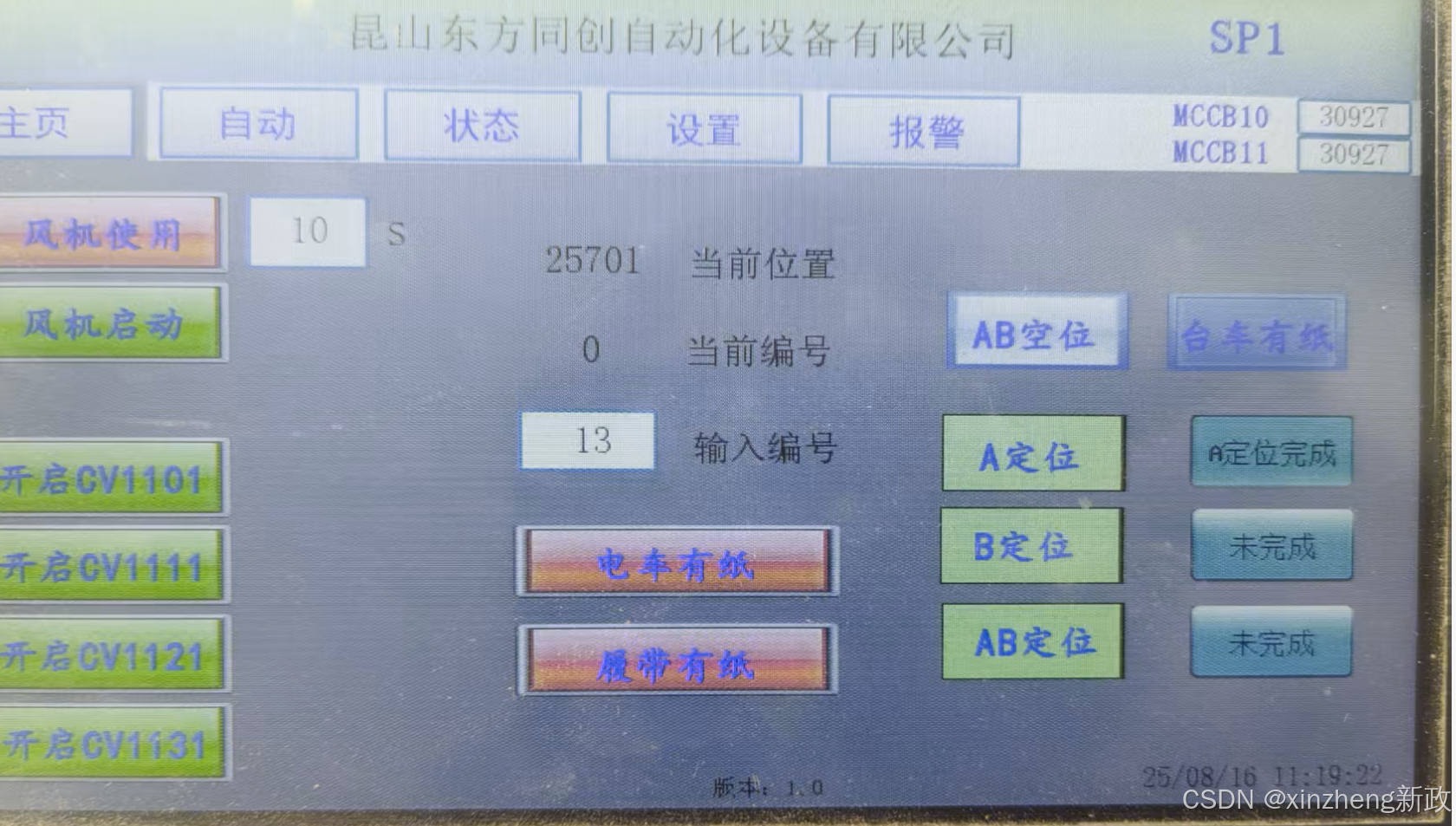
如图: 空电车 变为 电车有纸 台车空车 变为 台车有纸
#3 电车移动到风机,进行吹风作业。