【自动驾驶】自动驾驶概述 ① ( 自动驾驶 与 无人驾驶 | 自动驾驶 相关岗位 及 技能需求 )
文章目录
- 一、自动驾驶 与 无人驾驶
- 1、自动驾驶
- 2、无人驾驶
- 二、自动驾驶 相关岗位 及 技能需求
一、自动驾驶 与 无人驾驶
自动驾驶 和 无人驾驶 是近年来 智能交通领域 的热门概念 , 两者均依托 人工智能、传感器、通信技术 等实现车辆的 自动化行驶 , 但在 技术定义、应用场景 和 操作模式 上存在一定差异 ;
1、自动驾驶
自动驾驶 指 车辆 通过搭载的 传感器 ( 如 : 摄像头、毫米波雷达、激光雷达 ) 、算法 和 控制系统 , 自主完成 部分 或 全部 驾驶任务 ;
自动驾驶 的 核心是 辅助人类驾驶 或 在特定条件下替代人类驾驶 , 驾驶员 需要在必要时接管车辆 ;
自动驾驶 通常分为 L0-L5 六个等级 ( SAE 标准 ) , L0 完全手动 , L5 全场景无人驾驶 ;
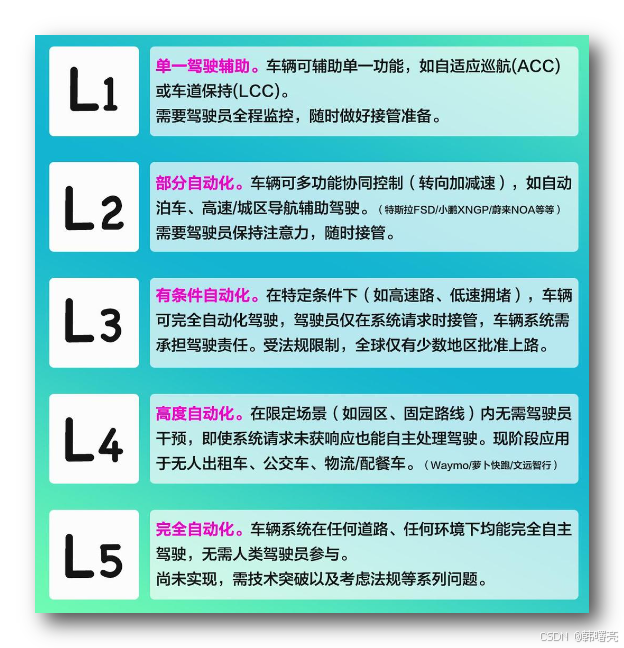
其中 , L1 ~ L4 需人类在特定场景下介入 , 如 : 极端天气、复杂路况 ;
2、无人驾驶
无人驾驶 是 自动驾驶 的最高形式 , 特指车辆在 无人类驾驶员、无远程操控 的情况下 , 完全自主应对所有交通场景 , 对应 L5 级 , 其核心是 全场景、全时段的自主决策 ;
二、自动驾驶 相关岗位 及 技能需求
自动驾驶 相关岗位 及 技能需求 :
- 深度学习工程师 : 设计、训练和优化基于深度学习的自动驾驶模型 , 解决 感知 ( 如 : 目标检测、语义分割 )、决策 ( 如 : 行为预测 ) 等核心问题 ;
- 精通深度学习框架 , 如 : TensorFlow、PyTorch 等 框架 ;
- 掌握 CNN、Transformer、RNN 等网络结构
- 熟悉目标检测(YOLO、Faster R-CNN)、语义分割(U-Net)等算法;
- 具备 C++/Python 编程能力 ;
- 了解模型压缩、量化技术 , 具备数据处理和工程实现能力 ;
- 决策规划算法工程师 : 根据 感知模块 传递的 环境信息 ( 如 : 障碍物位置、车道线 ) , 规划车辆 行驶路径 ( 路径规划 ) 和 行为策略(如 : 加速、减速、直行、转弯、换道、避障) ;
- 掌握路径规划算法 , 如 : A*、D* Lite、RRT* 等 ;
- 熟悉决策模型 , 如 : 有限状态机、马尔可夫决策过程、强化学习 ;
- 了解交通规则和驾驶场景逻辑 ;
- 具备 C++/Python 编程能力 , 熟悉 ROS 等开发工具 ;
- 图像算法工程师 : 基于 摄像头数据 开发 图像处理算法 , 实现 车道线检测、交通标志识别、行人 / 车辆检测 等功能 ;
- 精通计算机视觉算法 , 如 : 边缘检测、特征匹配、目标跟踪 等 ;
- 熟悉 OpenCV 等视觉库 ;
- 了解深度学习在图像任务中的应用 , 如 : CNN 用于分类 / 检测 ;
- 掌握 C++/Python 编程 , 具备图像数据处理经验 ;
- 感知算法工程师 : 负责 处理 摄像头、雷达等传感器数据 , 实现 对周围环境的感知 , 实现目标检测、识别与跟踪等功能 , 包括车道线检测、车辆及障碍物检测等 ;
- 掌握感知核心算法 , 如 : 目标检测、跟踪、语义分割 ;
- 熟悉多模态数据处理 , 如 : 图像、点云 等数据 ;
- 了解 深度学习 与 传统计算机视觉 结合的方法 ;
- 具备传感器原理基础 , 熟悉 ROS 和 点云处理工具 , 如 : PCL ;
- 多传感器融合算法工程师 : 处理 摄像头、毫米波雷达、激光雷达 等相关数据 解析融合算法 , 将不同传感器的数据进行融合 , 提高感知的准确性和可靠性 , 弥补单一传感器缺陷 ; 解决时间同步、空间校准、数据关联等问题 , 提升感知可靠性 ;
- 掌握融合算法 , 如 : 卡尔曼滤波、粒子滤波、贝叶斯估计 等算法 ;
- 熟悉传感器原理及误差模型 ;
- 了解 SLAM 同步定位与地图构建 技术 ;
- 具备 C++ 编程能力 , 熟悉 ROS 和数据校准工具 ;
- 系统工程师 : 负责 自动驾驶系统 的 整体架构设计 与 集成 , 协调硬件(传感器、计算平台)与 软件(算法、操作系统)的适配 ;
- 熟悉嵌入式系统 ( 如 : Linux、QNX ) 和车载计算平台 ( 如 : NVIDIA Drive ) ;
- 了解硬件接口 ( CAN、Ethernet ) 和 通信协议 ;
- 具备系统调试、性能优化能力 ;
- 掌握 C++/Python , 了解 ROS 2 等框架 ;
- 车辆控制工程师 : 开发 车辆 横纵向控制算法 , 将 决策规划 输出的 路径和速度 转化为 实际控制指令 , 如 : 油门、刹车、转向 ;
- 掌握控制理论 , 如 : PID、LQR、模型预测控制 MPC ;
- 了解车辆动力学模型 ;
- 熟悉车载总线 ( CAN ) 和控制指令协议 ;
- 具备 C++ 编程能力 , 有实车调试经验者优先。
- 自动驾驶算法工程师 : 综合负责 自动驾驶核心算法的研发,涵盖感知、决策、控制等环节 ;
- 具备感知、决策或控制至少一个领域的深入知识 ;
- 熟悉自动驾驶系统全流程 ;
- 掌握 C++/Python 和算法工程实现 ;
- 了解深度学习、传统控制理论等多学科工具 ;
- 高精地图工程师 : 构建和维护 高精地图 , 包含车道线、交通标志、坡度等厘米级信息 , 开发 地图自动化标注、动态更新 ( 如 : 道路施工、临时管制 ) 算法 , 对接定位模块 , 提供地图匹配支持 ;
- 熟悉 地理信息系统 ( GIS ) 和 点云处理 ( 如 : PCL、CloudCompare ) ;
- 掌握 SLAM 和地图构建算法 ;
- 了解自动驾驶定位原理 , 如 : GNSS+IMU 融合 ;
- 具备数据处理和地图规格设计能力 ;