ESP32_STM32_DHT20
前言
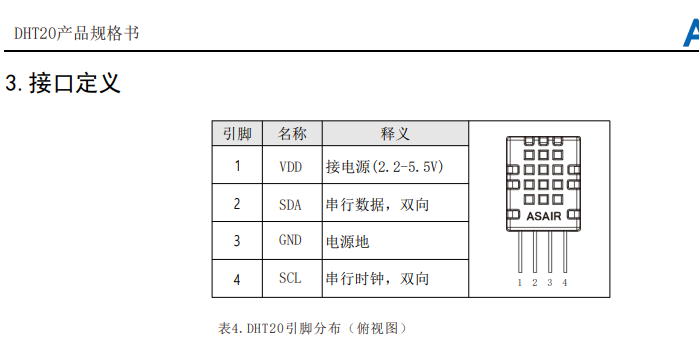
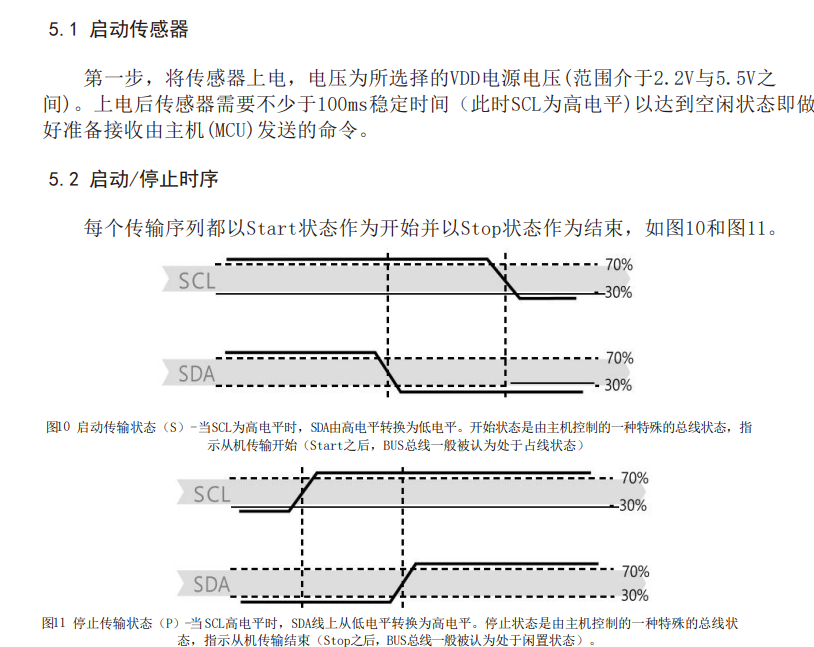
DHT20是DHT11的全新升级产品,配置了专用的ASIC传感器芯片、高性能的半导体硅基电容式湿度传感器和一个标准的片上温度传感器,并使用了标准I²C数据输出信号格式。其性能已经大大提升,并且超过了前一代传感器(DHT11)的可靠性水平。新一代升级产品,经过改进使其在高温高湿环境下的性能更稳定;同时,产品的精度、响应时间、测量范围都得到了大幅的提升。每一个传感器的出厂都经过严格的校准和测试,保障并满足客户的大规模应用。宽电压支持2.2-5.5VDC
1:环境
VSCODE+IDF5.4 + ESP32 3C 或 STM32F103C8T6+KEIL5
DHT20
面包板
杜邦线
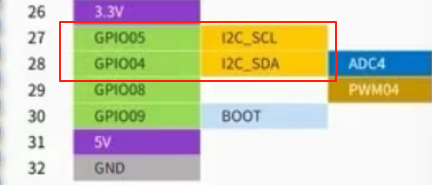
2:接线
用软件模拟也可以,
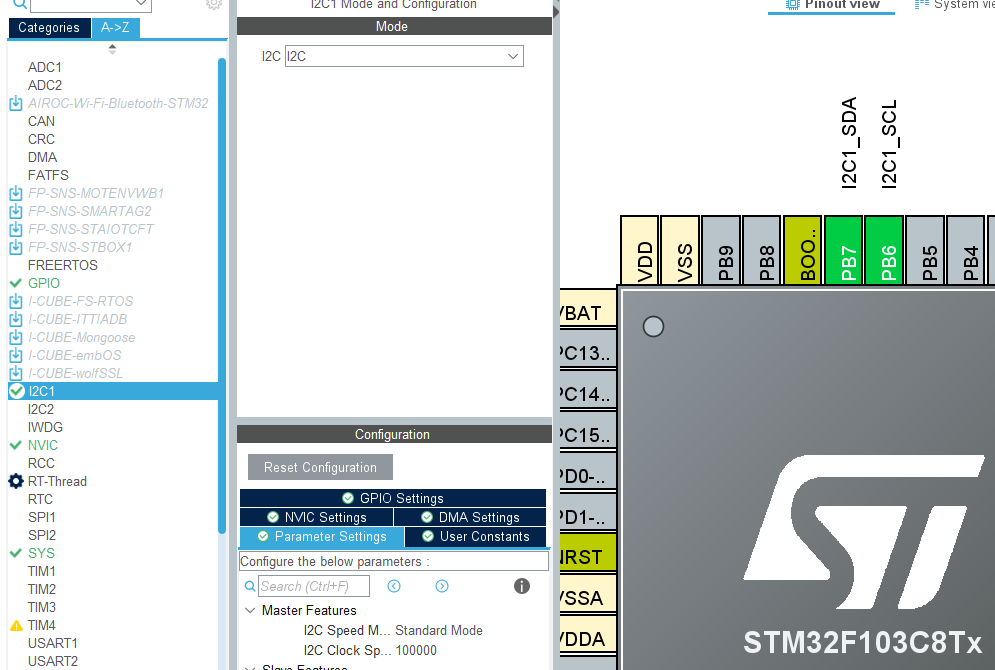
3:实现I2C 消息
3:STM32 代码 参考了官方DEMO 用的驱动是 AHT20-21的
#include "stm32f10x.h"
#include "AHT20-21.h"
#include "usart.h"int f_us=9;
int f_ms=9000;
// SysTick初始化 - 配置为HCLK/8 (72MHz/8 = 9MHz)
void SysTick_Init(void) {// 设置SysTick时钟源为HCLK/8SysTick_CLKSourceConfig(SysTick_CLKSource_HCLK_Div8);
}// 精确延时函数(毫秒)
void delay_ms(uint32_t nms) {uint32_t temp;// 设置重载值SysTick->LOAD = nms * f_ms - 1;// 清空当前值SysTick->VAL = 0x00;// 使能SysTick定时器SysTick->CTRL |= (0x01 << 0);do {temp = SysTick->CTRL;} while ((temp & (0x01 << 0)) && (!(temp & (0x01 << 16))));// 关闭SysTick定时器SysTick->CTRL &= ~(0x01 << 0);
}// 精确延时函数(微秒)
void delay_us(uint32_t nus) {uint32_t temp;// 设置重载值SysTick->LOAD = nus * f_us - 1;// 清空当前值SysTick->VAL = 0x00;// 使能SysTick定时器SysTick->CTRL |= (0x01 << 0);do {temp = SysTick->CTRL;} while ((temp & (0x01 << 0)) && (!(temp & (0x01 << 16))));// 关闭SysTick定时器SysTick->CTRL &= ~(0x01 << 0);
}void delay_s(uint32_t ns){uint32_t n =0;for( n =0;n<ns;n++){delay_ms(1000);}
}void SensorDelay_us(uint32_t t)//延时函数
{delay_us(t);
}
void Delay_4us(void) {delay_us(4);
}
void Delay_5us(void) //延时函数
{delay_us(5);
}
void Delay_1ms(uint32_t t) //延时函数
{delay_ms(t);
}void AHT20_Clock_Init(void) //延时函数
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);//RCC_APB2Periph_GPIOCRCC_APB1PeriphClockCmd(RCC_APB1Periph_I2C1, ENABLE);
}
//F103C8T6 pb6 SCL pb7 sda
#define PIN_SCL GPIO_Pin_6
#define PIN_SDA GPIO_Pin_7 //GPIO_Pin_15->GPIO_Pin_7
void SDA_Pin_Output_High(void) //将PB15配置为输出 , 并设置为高电平, PB15作为I2C的SDA
{GPIO_InitTypeDef GPIO_InitStruct;GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;//推挽输出GPIO_InitStruct.GPIO_Pin = PIN_SDA;GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB,& GPIO_InitStruct);GPIO_SetBits(GPIOB,PIN_SDA);
}void SDA_Pin_Output_Low(void) //将P15配置为输出 并设置为低电平
{GPIO_InitTypeDef GPIO_InitStruct;GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;//推挽输出GPIO_InitStruct.GPIO_Pin = PIN_SDA;GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB,& GPIO_InitStruct);GPIO_ResetBits(GPIOB,PIN_SDA);
}void SDA_Pin_IN_FLOATING(void) //SDA配置为浮空输入
{GPIO_InitTypeDef GPIO_InitStruct;GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IN_FLOATING;//GPIO_InitStruct.GPIO_Pin = PIN_SDA;GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init( GPIOB,&GPIO_InitStruct);
}void SCL_Pin_Output_High(void) //SCL输出高电平,P14作为I2C的SCL
{GPIO_SetBits(GPIOB,PIN_SCL);
}void SCL_Pin_Output_Low(void) //SCL输出低电平
{GPIO_ResetBits(GPIOB,PIN_SCL);
}void Init_I2C_Sensor_Port(void) //初始化I2C接口,输出为高电平
{ GPIO_InitTypeDef GPIO_InitStruct;GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;//推挽输出GPIO_InitStruct.GPIO_Pin = PIN_SDA;GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB,& GPIO_InitStruct);GPIO_SetBits(GPIOB,PIN_SDA);//输出高电平// GPIO_InitTypeDef GPIO_InitStruct;GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;//推挽输出GPIO_InitStruct.GPIO_Pin = PIN_SCL;GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB,& GPIO_InitStruct);GPIO_SetBits(GPIOB,PIN_SCL);//输出高电平}
void I2C_Start(void) //I2C主机发送START信号
{SDA_Pin_Output_High();SensorDelay_us(8);SCL_Pin_Output_High();SensorDelay_us(8);SDA_Pin_Output_Low();SensorDelay_us(8);SCL_Pin_Output_Low();SensorDelay_us(8);
}void AHT20_WR_Byte(uint8_t Byte) //往AHT20写一个字节
{uint8_t Data,N,i; Data=Byte;i = 0x80;for(N=0;N<8;N++){SCL_Pin_Output_Low(); Delay_4us(); if(i&Data){SDA_Pin_Output_High();}else{SDA_Pin_Output_Low();} SCL_Pin_Output_High();Delay_4us();Data <<= 1;}SCL_Pin_Output_Low();SensorDelay_us(8); SDA_Pin_IN_FLOATING();SensorDelay_us(8);
} uint8_t AHT20_RD_Byte(void)//从AHT20读取一个字节
{uint8_t Byte,i,a;Byte = 0;SCL_Pin_Output_Low();SDA_Pin_IN_FLOATING();SensorDelay_us(8); for(i=0;i<8;i++){SCL_Pin_Output_High(); Delay_5us();a=0;if(GPIO_ReadInputDataBit(GPIOB,PIN_SDA)) a=1;Byte = (Byte<<1)|a;SCL_Pin_Output_Low();Delay_5us();}SDA_Pin_IN_FLOATING();SensorDelay_us(8); return Byte;
}uint8_t Receive_ACK(void) //看AHT20是否有回复ACK
{uint16_t CNT;CNT = 0;SCL_Pin_Output_Low(); SDA_Pin_IN_FLOATING();SensorDelay_us(8); SCL_Pin_Output_High(); SensorDelay_us(8); while((GPIO_ReadInputDataBit(GPIOB,PIN_SDA)) && CNT < 100) //P14作为I2C的SCLCNT++;if(CNT == 100){return 0;}SCL_Pin_Output_Low(); SensorDelay_us(8); return 1;
}void Send_ACK(void) //主机回复ACK信号
{SCL_Pin_Output_Low(); SensorDelay_us(8); SDA_Pin_Output_Low();SensorDelay_us(8); SCL_Pin_Output_High(); SensorDelay_us(8);SCL_Pin_Output_Low(); SensorDelay_us(8);SDA_Pin_IN_FLOATING();SensorDelay_us(8);
}void Send_NOT_ACK(void) //主机不回复ACK
{SCL_Pin_Output_Low(); SensorDelay_us(8);SDA_Pin_Output_High();SensorDelay_us(8);SCL_Pin_Output_High(); SensorDelay_us(8); SCL_Pin_Output_Low(); SensorDelay_us(8);SDA_Pin_Output_Low();SensorDelay_us(8);
}void Stop_I2C(void) //一条协议结束
{SDA_Pin_Output_Low();SensorDelay_us(8);SCL_Pin_Output_High(); SensorDelay_us(8);SDA_Pin_Output_High();SensorDelay_us(8);
}uint8_t AHT20_Read_Status(void)//读取AHT20的状态寄存器
{uint8_t Byte_first; I2C_Start();AHT20_WR_Byte(0x71);Receive_ACK();Byte_first = AHT20_RD_Byte();Send_NOT_ACK();Stop_I2C();return Byte_first;
}uint8_t AHT20_Read_Cal_Enable(void) //查询cal enable位有没有使能
{uint8_t val = 0;//ret = 0,val = AHT20_Read_Status();if((val & 0x68)==0x08)return 1;else return 0;}void AHT20_SendAC(void) //向AHT20发送AC命令
{I2C_Start();AHT20_WR_Byte(0x70);Receive_ACK();AHT20_WR_Byte(0xac);//0xAC采集命令Receive_ACK();AHT20_WR_Byte(0x33);Receive_ACK();AHT20_WR_Byte(0x00);Receive_ACK();Stop_I2C();}//CRC校验类型:CRC8/MAXIM
//多项式:X8+X5+X4+1
//Poly:0011 0001 0x31
//高位放到后面就变成 1000 1100 0x8c
//C现实代码:
uint8_t Calc_CRC8(uint8_t *message,uint8_t Num)
{uint8_t i;uint8_t byte;uint8_t crc=0xFF;for(byte=0; byte<Num; byte++){crc^=(message[byte]);for(i=8;i>0;--i){if(crc&0x80) crc=(crc<<1)^0x31;else crc=(crc<<1);}}return crc;
}void AHT20_Read_CTdata(uint32_t *ct) //没有CRC校验,直接读取AHT20的温度和湿度数据
{volatile uint8_t Byte_1th=0;volatile uint8_t Byte_2th=0;volatile uint8_t Byte_3th=0;volatile uint8_t Byte_4th=0;volatile uint8_t Byte_5th=0;volatile uint8_t Byte_6th=0;uint32_t RetuData = 0;uint16_t cnt = 0;AHT20_SendAC();//向AHT10发送AC命令Delay_1ms(80);//延时80ms左右 cnt = 0;while(((AHT20_Read_Status()&0x80)==0x80))//直到状态bit[7]为0,表示为空闲状态,若为1,表示忙状态{SensorDelay_us(1508);if(cnt++>=100){break;}}I2C_Start();AHT20_WR_Byte(0x71);Receive_ACK();Byte_1th = AHT20_RD_Byte();//状态字,查询到状态为0x98,表示为忙状态,bit[7]为1;状态为0x1C,或者0x0C,或者0x08表示为空闲状态,bit[7]为0Send_ACK();Byte_2th = AHT20_RD_Byte();//湿度Send_ACK();Byte_3th = AHT20_RD_Byte();//湿度Send_ACK();Byte_4th = AHT20_RD_Byte();//湿度/温度Send_ACK();Byte_5th = AHT20_RD_Byte();//温度Send_ACK();Byte_6th = AHT20_RD_Byte();//温度Send_NOT_ACK();Stop_I2C();RetuData = (RetuData|Byte_2th)<<8;RetuData = (RetuData|Byte_3th)<<8;RetuData = (RetuData|Byte_4th);RetuData =RetuData >>4;ct[0] = RetuData;//湿度RetuData = 0;RetuData = (RetuData|Byte_4th)<<8;RetuData = (RetuData|Byte_5th)<<8;RetuData = (RetuData|Byte_6th);RetuData = RetuData&0xfffff;ct[1] =RetuData; //温度}void AHT20_Read_CTdata_crc(uint32_t *ct) //CRC校验后,读取AHT20的温度和湿度数据
{volatile uint8_t Byte_1th=0;volatile uint8_t Byte_2th=0;volatile uint8_t Byte_3th=0;volatile uint8_t Byte_4th=0;volatile uint8_t Byte_5th=0;volatile uint8_t Byte_6th=0;volatile uint8_t Byte_7th=0;uint32_t RetuData = 0;uint16_t cnt = 0;// uint8_t CRCDATA=0;uint8_t CTDATA[6]={0};//用于CRC传递数组AHT20_SendAC();//向AHT10发送AC命令Delay_1ms(80);//延时80ms左右 cnt = 0;while(((AHT20_Read_Status()&0x80)==0x80))//直到状态bit[7]为0,表示为空闲状态,若为1,表示忙状态{SensorDelay_us(1508);if(cnt++>=100){break;}}I2C_Start();AHT20_WR_Byte(0x71);Receive_ACK();CTDATA[0]=Byte_1th = AHT20_RD_Byte();//状态字,查询到状态为0x98,表示为忙状态,bit[7]为1;状态为0x1C,或者0x0C,或者0x08表示为空闲状态,bit[7]为0Send_ACK();CTDATA[1]=Byte_2th = AHT20_RD_Byte();//湿度Send_ACK();CTDATA[2]=Byte_3th = AHT20_RD_Byte();//湿度Send_ACK();CTDATA[3]=Byte_4th = AHT20_RD_Byte();//湿度/温度Send_ACK();CTDATA[4]=Byte_5th = AHT20_RD_Byte();//温度Send_ACK();CTDATA[5]=Byte_6th = AHT20_RD_Byte();//温度Send_ACK();Byte_7th = AHT20_RD_Byte();//CRC数据Send_NOT_ACK(); //注意: 最后是发送NAKStop_I2C();if(Calc_CRC8(CTDATA,6)==Byte_7th){RetuData = (RetuData|Byte_2th)<<8;RetuData = (RetuData|Byte_3th)<<8;RetuData = (RetuData|Byte_4th);RetuData =RetuData >>4;ct[0] = RetuData;//湿度RetuData = 0;RetuData = (RetuData|Byte_4th)<<8;RetuData = (RetuData|Byte_5th)<<8;RetuData = (RetuData|Byte_6th);RetuData = RetuData&0xfffff;ct[1] =RetuData; //温度}else{ct[0]=0x00;ct[1]=0x00;//校验错误返回值,客户可以根据自己需要更改}//CRC数据
}void AHT20_Init(void) //初始化AHT20
{ Init_I2C_Sensor_Port();delay_ms(100);I2C_Start();AHT20_WR_Byte(0x70);Receive_ACK();AHT20_WR_Byte(0xa8);//0xA8进入NOR工作模式Receive_ACK();AHT20_WR_Byte(0x00);Receive_ACK();AHT20_WR_Byte(0x00);Receive_ACK();Stop_I2C();Delay_1ms(10);//延时10ms左右I2C_Start();AHT20_WR_Byte(0x70);Receive_ACK();AHT20_WR_Byte(0xbe);//0xBE初始化命令,AHT20的初始化命令是0xBE, AHT10的初始化命令是0xE1Receive_ACK();AHT20_WR_Byte(0x08);//相关寄存器bit[3]置1,为校准输出Receive_ACK();AHT20_WR_Byte(0x00);Receive_ACK();Stop_I2C();Delay_1ms(10);//延时10ms左右
}
void JH_Reset_REG(uint8_t addr)
{uint8_t Byte_first,Byte_second,Byte_third,Byte_fourth;I2C_Start();AHT20_WR_Byte(0x70);//原来是0x70Receive_ACK();AHT20_WR_Byte(addr);Receive_ACK();AHT20_WR_Byte(0x00);Receive_ACK();AHT20_WR_Byte(0x00);Receive_ACK();Stop_I2C();Delay_1ms(5);//延时5ms左右I2C_Start();AHT20_WR_Byte(0x71);//Receive_ACK();Byte_first = AHT20_RD_Byte();Send_ACK();Byte_second = AHT20_RD_Byte();Send_ACK();Byte_third = AHT20_RD_Byte();Send_NOT_ACK();Stop_I2C();Delay_1ms(10);//延时10ms左右I2C_Start();AHT20_WR_Byte(0x70);///Receive_ACK();AHT20_WR_Byte(0xB0|addr);////寄存器命令Receive_ACK();AHT20_WR_Byte(Byte_second);Receive_ACK();AHT20_WR_Byte(Byte_third);Receive_ACK();Stop_I2C();Byte_second=0x00;Byte_third =0x00;
}void AHT20_Start_Init(void)
{JH_Reset_REG(0x1b);JH_Reset_REG(0x1c);JH_Reset_REG(0x1e);
}int32_t main(void)
{SysTick_Init();
// Init_I2C_Sensor_Port();USART1_Init();uint32_t CT_data[2];volatile int c1,t1;AHT20_Clock_Init();AHT20_Init();USART1_SendString("12345 \r\n");//***********************************************************************************//①刚上电,产品芯片内部就绪需要时间,延时100~500ms,建议500ms//**********************************************************************************Delay_1ms(500);//***********************************************************************************////②上电第一次发0x71读取状态字,判断状态字是否为0x18,如果不是0x18,进行寄存器初始化//***********************************************************************************if((AHT20_Read_Status()&0x18)!=0x18){AHT20_Start_Init(); //重新初始化寄存器Delay_1ms(10);}//***********************************************************************************////③根据客户自己需求发测量命令读取温湿度数据,当前while(1)循环发测量命令读取温湿度数据,仅供参考//***********************************************************************************char szbuf[128]={0,};while(1){AHT20_Read_CTdata(CT_data); //不经过CRC校验,直接读取AHT20的温度和湿度数据 推荐每隔大于1S读一次//AHT20_Read_CTdata_crc(CT_data); //crc校验后,读取AHT20的温度和湿度数据 c1 = CT_data[0]*100*10/1024/1024; //计算得到湿度值c1(放大了10倍)t1 = CT_data[1]*200*10/1024/1024-500;//计算得到温度值t1(放大了10倍)////下一步客户处理显示数据,sprintf(szbuf,"%d-[%d]\r\n",c1,t1);USART1_SendString((const char*)szbuf);delay_s(2);}}
结果如下
[19:22:48.821]收←◆736-[319]
[19:22:50.904]收←◆736-[319]
[19:22:52.987]收←◆736-[319]
[19:22:55.071]收←◆737-[319]
[19:22:57.154]收←◆737-[319]
4:ESP32 3C 代码
#include "driver/gpio.h"
#include "esp_log.h"
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
#include <stdio.h>
#include "esp_timer.h"#define TAG "DHT20"
#define SDA_PIN GPIO_NUM_4
#define SCL_PIN GPIO_NUM_5
#define DHT20_ADDR 0x38// DHT20 ESP32-C3
// VCC -> 3.3V
// GND -> GND
// SDA -> GPIO4
// SCL -> GPIO5
// 延时函数
void SensorDelay_us(uint32_t us) {uint32_t start = esp_timer_get_time();while (esp_timer_get_time() - start < us) {// 忙等待}
}void Delay_4us(void) {SensorDelay_us(4);
}void Delay_5us(void) {SensorDelay_us(5);
}void Delay_1ms(uint32_t ms) {vTaskDelay(pdMS_TO_TICKS(ms));
}// GPIO操作函数
void SDA_Pin_Output_High(void) {gpio_set_direction(SDA_PIN, GPIO_MODE_OUTPUT);gpio_set_level(SDA_PIN, 1);
}void SDA_Pin_Output_Low(void) {gpio_set_direction(SDA_PIN, GPIO_MODE_OUTPUT);gpio_set_level(SDA_PIN, 0);
}void SDA_Pin_IN_FLOATING(void) {gpio_set_direction(SDA_PIN, GPIO_MODE_INPUT);gpio_set_pull_mode(SDA_PIN, GPIO_FLOATING);
}void SCL_Pin_Output_High(void) {gpio_set_level(SCL_PIN, 1);
}void SCL_Pin_Output_Low(void) {gpio_set_level(SCL_PIN, 0);
}// I²C初始化
void Init_I2C_Sensor_Port(void) {// 配置SCL为输出gpio_config_t io_conf = {.pin_bit_mask = (1ULL << SCL_PIN),.mode = GPIO_MODE_OUTPUT,.pull_up_en = GPIO_PULLUP_ENABLE,.intr_type = GPIO_INTR_DISABLE,};gpio_config(&io_conf);// 配置SDA为输出io_conf.pin_bit_mask = (1ULL << SDA_PIN);gpio_config(&io_conf);// 初始状态:SCL高电平,SDA高电平gpio_set_level(SCL_PIN, 1);gpio_set_level(SDA_PIN, 1);
}// I²C基础操作
void I2C_Start(void) {SDA_Pin_Output_High();SensorDelay_us(8);SCL_Pin_Output_High();SensorDelay_us(8);SDA_Pin_Output_Low();SensorDelay_us(8);SCL_Pin_Output_Low();SensorDelay_us(8);
}void Stop_I2C(void) {SDA_Pin_Output_Low();SensorDelay_us(8);SCL_Pin_Output_High();SensorDelay_us(8);SDA_Pin_Output_High();SensorDelay_us(8);
}void AHT20_WR_Byte(uint8_t Byte) {uint8_t Data = Byte;for (int N = 0; N < 8; N++) {SCL_Pin_Output_Low();Delay_4us();if (Data & 0x80) {SDA_Pin_Output_High();} else {SDA_Pin_Output_Low();}SCL_Pin_Output_High();Delay_4us();Data <<= 1;}SCL_Pin_Output_Low();SensorDelay_us(8);SDA_Pin_IN_FLOATING();SensorDelay_us(8);
}uint8_t AHT20_RD_Byte(void) {uint8_t Byte = 0;SCL_Pin_Output_Low();SDA_Pin_IN_FLOATING();SensorDelay_us(8);for (int i = 0; i < 8; i++) {SCL_Pin_Output_High();Delay_5us();Byte <<= 1;if (gpio_get_level(SDA_PIN)) {Byte |= 0x01;}SCL_Pin_Output_Low();Delay_5us();}SDA_Pin_IN_FLOATING();SensorDelay_us(8);return Byte;
}uint8_t Receive_ACK(void) {uint16_t CNT = 0;SCL_Pin_Output_Low();SDA_Pin_IN_FLOATING();SensorDelay_us(8);SCL_Pin_Output_High();SensorDelay_us(8);while (gpio_get_level(SDA_PIN) && CNT < 100) {CNT++;}if (CNT == 100) {return 0;}SCL_Pin_Output_Low();SensorDelay_us(8);return 1;
}void Send_ACK(void) {SCL_Pin_Output_Low();SensorDelay_us(8);SDA_Pin_Output_Low();SensorDelay_us(8);SCL_Pin_Output_High();SensorDelay_us(8);SCL_Pin_Output_Low();SensorDelay_us(8);SDA_Pin_IN_FLOATING();SensorDelay_us(8);
}void Send_NOT_ACK(void) {SCL_Pin_Output_Low();SensorDelay_us(8);SDA_Pin_Output_High();SensorDelay_us(8);SCL_Pin_Output_High();SensorDelay_us(8);SCL_Pin_Output_Low();SensorDelay_us(8);SDA_Pin_Output_Low();SensorDelay_us(8);
}// DHT20状态读取
uint8_t DHT20_Read_Status(void) {uint8_t Byte_first;I2C_Start();AHT20_WR_Byte(0x71);if (!Receive_ACK()) goto error;Byte_first = AHT20_RD_Byte();Send_NOT_ACK();Stop_I2C();return Byte_first;error:Stop_I2C();return 0xFF;
}// 发送测量命令
void DHT20_SendAC(void) {I2C_Start();AHT20_WR_Byte(0x70);if (!Receive_ACK()) goto error;AHT20_WR_Byte(0xAC);if (!Receive_ACK()) goto error;AHT20_WR_Byte(0x33);if (!Receive_ACK()) goto error;AHT20_WR_Byte(0x00);if (!Receive_ACK()) goto error;Stop_I2C();return;error:Stop_I2C();
}// CRC计算函数
uint8_t Calc_CRC8(uint8_t *message, uint8_t Num) {uint8_t crc = 0xFF;for (uint8_t byte = 0; byte < Num; byte++) {crc ^= message[byte];for (uint8_t i = 8; i > 0; i--) {if (crc & 0x80) {crc = (crc << 1) ^ 0x31;} else {crc = (crc << 1);}}}return crc;
}// 读取温湿度数据(带CRC校验)
void DHT20_Read_CTdata_crc(uint32_t *ct) {uint8_t CTDATA[6] = {0};uint8_t Byte_1th = 0, Byte_2th = 0, Byte_3th = 0;uint8_t Byte_4th = 0, Byte_5th = 0, Byte_6th = 0, Byte_7th = 0;uint32_t RetuData = 0;uint16_t cnt = 0;// 发送测量命令DHT20_SendAC();Delay_1ms(80); // 等待80ms// 等待设备就绪while ((DHT20_Read_Status() & 0x80) && cnt < 100) {SensorDelay_us(1508);cnt++;if (cnt >= 100) break;}// 读取数据I2C_Start();AHT20_WR_Byte(0x71);if (!Receive_ACK()) goto error;CTDATA[0] = Byte_1th = AHT20_RD_Byte(); // 状态字Send_ACK();CTDATA[1] = Byte_2th = AHT20_RD_Byte(); // 湿度高字节Send_ACK();CTDATA[2] = Byte_3th = AHT20_RD_Byte(); // 湿度中字节Send_ACK();CTDATA[3] = Byte_4th = AHT20_RD_Byte(); // 湿度低4位 + 温度高4位Send_ACK();CTDATA[4] = Byte_5th = AHT20_RD_Byte(); // 温度中字节Send_ACK();CTDATA[5] = Byte_6th = AHT20_RD_Byte(); // 温度低字节Send_ACK();Byte_7th = AHT20_RD_Byte(); // CRCSend_NOT_ACK();Stop_I2C();// CRC校验if (Calc_CRC8(CTDATA, 6) == Byte_7th) {// 解析湿度数据RetuData = (Byte_2th << 12) | (Byte_3th << 4) | (Byte_4th >> 4);ct[0] = RetuData;// 解析温度数据RetuData = ((Byte_4th & 0x0F) << 16) | (Byte_5th << 8) | Byte_6th;ct[1] = RetuData;} else {ct[0] = 0;ct[1] = 0; // CRC错误ESP_LOGE(TAG, "CRC error! Expected: 0x%02X, Actual: 0x%02X", Calc_CRC8(CTDATA, 6), Byte_7th);}return;error:Stop_I2C();ct[0] = ct[1] = 0;
}// 初始化DHT20
void DHT20_Init(void) {Init_I2C_Sensor_Port();Delay_1ms(100);I2C_Start();AHT20_WR_Byte(0x70);if (!Receive_ACK()) goto error;AHT20_WR_Byte(0xA8); // NOR工作模式if (!Receive_ACK()) goto error;AHT20_WR_Byte(0x00);if (!Receive_ACK()) goto error;AHT20_WR_Byte(0x00);if (!Receive_ACK()) goto error;Stop_I2C();Delay_1ms(10);I2C_Start();AHT20_WR_Byte(0x70);if (!Receive_ACK()) goto error;AHT20_WR_Byte(0xBE); // 初始化命令if (!Receive_ACK()) goto error;AHT20_WR_Byte(0x08); // 相关寄存器bit[3]置1if (!Receive_ACK()) goto error;AHT20_WR_Byte(0x00);if (!Receive_ACK()) goto error;Stop_I2C();Delay_1ms(10);return;error:Stop_I2C();
}// 寄存器初始化
void JH_Reset_REG(uint8_t addr) {uint8_t Byte_second = 0, Byte_third = 0;// 写寄存器I2C_Start();AHT20_WR_Byte(0x70);if (!Receive_ACK()) goto error;AHT20_WR_Byte(addr);if (!Receive_ACK()) goto error;AHT20_WR_Byte(0x00);if (!Receive_ACK()) goto error;AHT20_WR_Byte(0x00);if (!Receive_ACK()) goto error;Stop_I2C();Delay_1ms(5);// 读寄存器I2C_Start();AHT20_WR_Byte(0x71);if (!Receive_ACK()) goto error;AHT20_RD_Byte(); // 丢弃第一个字节Send_ACK();Byte_second = AHT20_RD_Byte();Send_ACK();Byte_third = AHT20_RD_Byte();Send_NOT_ACK();Stop_I2C();Delay_1ms(10);// 写回寄存器I2C_Start();AHT20_WR_Byte(0x70);if (!Receive_ACK()) goto error;AHT20_WR_Byte(0xB0 | addr);if (!Receive_ACK()) goto error;AHT20_WR_Byte(Byte_second);if (!Receive_ACK()) goto error;AHT20_WR_Byte(Byte_third);if (!Receive_ACK()) goto error;Stop_I2C();return;error:Stop_I2C();
}// 初始化DHT20寄存器
void DHT20_Start_Init(void) {JH_Reset_REG(0x1B);JH_Reset_REG(0x1C);JH_Reset_REG(0x1E);
}// 主应用
void app_main(void) {// 初始化I²CInit_I2C_Sensor_Port();ESP_LOGI(TAG, "I2C initialized");// 初始化DHT20DHT20_Init();ESP_LOGI(TAG, "DHT20 initialized");// 上电后等待500msDelay_1ms(500);// 读取状态字并检查uint8_t status = DHT20_Read_Status();if ((status & 0x18) != 0x18) {ESP_LOGW(TAG, "Calibration needed, initializing registers");DHT20_Start_Init();Delay_1ms(10);} else {ESP_LOGI(TAG, "Device is calibrated and ready");}// 主循环while (1) {uint32_t CT_data[2] = {0};int c1 = 0, t1 = 0;char szbuf[128] = {0};// 读取温湿度数据DHT20_Read_CTdata_crc(CT_data);// 计算温湿度值(放大10倍)c1 = CT_data[0] * 100 * 10 / 1024 / 1024; // 湿度t1 = CT_data[1] * 200 * 10 / 1024 / 1024 - 500; // 温度// 打印结果snprintf(szbuf, sizeof(szbuf), "Humidity: %d.%d%%, Temperature: %d.%d°C", c1 / 10, c1 % 10, t1 / 10, t1 % 10);ESP_LOGI(TAG, "%s", szbuf);// 等待2秒Delay_1ms(2000);}
}
5:测试结果 如果对你又帮助,麻烦点个赞,加个关注
跟买的小温湿度计比较,还是由点差异,这个小的是3快钱的
