决策树回归:用“分而治之”的智慧,搞定非线性回归难题(附3D可视化)
你有没有遇到过这样的回归问题:特征和目标的关系不是直线,而是弯弯曲曲的非线性关系?比如“温度越高,反应速度先增后减”“时间越长,产品质量下降的速率越来越快”。这时候,线性回归只能画直线,拟合效果差;SVR虽然能处理非线性,但结果像“黑箱”,说不清道理。
今天要讲的决策树回归,堪称解决这类问题的“实用派”:它用“分而治之”的思路,把复杂数据切成一小块一小块,每块用简单常数预测,既能捕捉非线性关系,又能说清“为什么这么预测”。从原理到代码,一次讲透决策树回归的核心逻辑,附3D可视化,帮你看懂它如何“拆解”复杂问题。
一、决策树回归:把复杂问题“拆”成简单问题
决策树回归的核心思想特别朴素:与其用一个复杂函数拟合所有数据,不如把数据分成多个小群体,每个群体用一个简单值(比如均值)预测。
举个例子:预测“化学反应速度”(目标),特征是“温度”和“时间”。数据分布可能很复杂——低温时,时间越长反应越快;高温时,时间太长反应反而变慢。
决策树回归会这样处理:
- 先找一个“最佳分裂点”(比如温度=500℃),把数据分成“低温组”和“高温组”;
- 对“低温组”,再找时间的分裂点(比如时间=5小时),分成“短时”和“长时”,分别用各自的平均反应速度预测;
- 对“高温组”,同样按时间分裂,用各组均值预测。
最终,整个数据被拆成多个小区域,每个区域的预测值就是该区域的平均反应速度——简单直接,还能说清“为什么这个样本预测值是X”(因为它属于低温+短时组,该组平均就是X)。
二、核心原理:如何找到“最佳分裂点”?
决策树回归的关键是递归分裂:从根节点开始,每次选一个特征和一个分裂点,把数据分成两部分,直到满足停止条件(如树深度足够、样本太少)。
1. 分裂的“好坏”用损失函数衡量
判断一个分裂点是否“最佳”,要看分裂后的数据“更集中”还是“更分散”。回归问题中最常用均方误差(MSE) 作为损失函数:
MSE=1n∑i=1n(yi−y^)2\text{MSE} = \frac{1}{n} \sum_{i=1}^n (y_i - \hat{y})^2MSE=n1i=1∑n(yi−y^)2
其中,yiy_iyi是样本真实值,y^\hat{y}y^是该区域的预测值(通常是均值)。
分裂的目标是:让分裂后两部分的总MSE尽可能小。
比如,分裂前整体MSE是100;分裂后,左半部分MSE=30,右半部分MSE=20,总MSE=50(小于100)——这个分裂就是有效的,让数据更“集中”。
2. 分裂的完整流程(以单特征为例)
假设特征是“温度”,目标是“反应速度”,分裂步骤:
- 遍历温度的所有可能值(比如300℃、400℃、500℃…)作为候选分裂点;
- 对每个候选点,把数据分成“温度≤T”和“温度>T”两组;
- 计算两组的MSE,并求和(总MSE);
- 选择总MSE最小的T作为最佳分裂点;
- 对分裂后的两组,重复上述步骤(递归分裂),直到满足停止条件(如树深度=5,或每组样本<10个)。
3. 多特征怎么办?逐个尝试,选最优
实际问题往往有多个特征(比如“温度”和“时间”),决策树会:
- 对每个特征,按上述步骤计算“最佳分裂点”和对应的总MSE;
- 选“总MSE最小”的那个特征和分裂点,完成本次分裂。
比如,对“温度”分裂的总MSE=50,对“时间”分裂的总MSE=40——就选“时间”作为本次分裂的特征。
三、决策树回归 vs 其他回归:优势在哪里?
| 回归方法 | 特点 | 适合场景 | 缺点 |
|---|---|---|---|
| 线性回归 | 拟合直线,简单易解释 | 特征与目标线性相关 | 无法处理非线性、特征交互 |
| 多项式回归 | 拟合曲线,处理轻度非线性 | 明确的低次非线性关系 | 高次易过拟合,特征多时有维度灾难 |
| SVR(核方法) | 处理复杂非线性 | 高维、非线性数据 | 结果难解释,参数调优复杂 |
| 决策树回归 | 分区域用常数预测,易解释 | 非线性、特征交互多、需解释性 | 易过拟合,对噪声敏感 |
决策树回归的核心优势:
- 能捕捉复杂非线性:不管数据是U型、S型还是分段变化,都能通过分裂拟合;
- 无需特征缩放:温度(℃)和时间(小时)单位不同也不影响,省去标准化步骤;
- 可解释性强:能画出“决策规则”(比如“温度≤500℃且时间≤5小时→预测值=20”),业务人员也能看懂;
- 自动处理特征交互:比如“低温时时间影响大,高温时时间影响小”这种交互关系,无需手动构造特征。
四、代码实战:用决策树回归预测化学反应速度
我们用“温度”和“时间”预测“反应速度”(非线性关系),演示决策树回归的完整流程,重点看它如何拟合复杂曲面。
完整代码(可直接运行)
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
from sklearn.tree import DecisionTreeRegressor
from mpl_toolkits.mplot3d import Axes3D # 3D绘图工具# 设置中文显示
plt.rcParams["font.family"] = ["SimHei", "WenQuanYi Micro Hei", "Heiti TC"]
plt.rcParams["axes.unicode_minus"] = False # 负号正常显示# ----------------------
# 1. 生成非线性数据(温度、时间→反应速度)
# ----------------------
np.random.seed(42) # 固定随机种子,结果可复现
n_samples = 1000 # 1000个样本# 特征:温度(20-1000℃)、时间(1-10小时)
temperature = np.random.uniform(20, 1000, n_samples) # 均匀分布
time = np.random.uniform(1, 10, n_samples)# 目标:反应速度(非线性关系:温度^1.5 - 时间^2 + 噪声)
reaction_speed = 0.05 * (temperature**1.5) - 0.5 * (time**2) + np.random.normal(0, 5, n_samples)# 整理成DataFrame
data = pd.DataFrame({'温度': temperature,'时间': time,'反应速度': reaction_speed
})# ----------------------
# 2. 训练决策树回归模型
# ----------------------
# 特征(温度、时间)和目标(反应速度)
X = data[['温度', '时间']]
y = data['反应速度']# 初始化模型:max_depth=5(控制树深度,防止过拟合)
model = DecisionTreeRegressor(max_depth=5, random_state=42)
model.fit(X, y) # 训练模型# ----------------------
# 3. 预测与可视化:3D曲面展示非线性拟合
# ----------------------
# 生成网格数据(覆盖温度和时间的取值范围)
temp_range = np.linspace(20, 1000, 100) # 温度从20到1000,取100个点
time_range = np.linspace(1, 10, 100) # 时间从1到10,取100个点
temp_grid, time_grid = np.meshgrid(temp_range, time_range) # 生成网格# 预测网格上的反应速度
# 先把网格数据展平成二维数组(n行2列),再预测,最后还原成网格形状
X_grid = np.c_[temp_grid.ravel(), time_grid.ravel()] # 展平
predicted_speed = model.predict(X_grid).reshape(temp_grid.shape) # 预测并还原形状# ----------------------
# 4. 绘制可视化图表
# ----------------------
fig = plt.figure(figsize=(14, 6))# 子图1:3D曲面图(展示预测的非线性关系)
ax1 = fig.add_subplot(121, projection='3d')
# 绘制预测曲面
surf = ax1.plot_surface(temp_grid, time_grid, predicted_speed,cmap='viridis', edgecolor='none', alpha=0.8
)
ax1.set_xlabel('温度(℃)')
ax1.set_ylabel('时间(小时)')
ax1.set_zlabel('预测反应速度')
ax1.set_title('决策树回归预测的3D曲面', fontsize=14)
fig.colorbar(surf, ax=ax1, shrink=0.5, aspect=5, label='反应速度') # 颜色条# 子图2:实际值vs预测值(评估拟合效果)
ax2 = fig.add_subplot(122)
y_pred = model.predict(X) # 对训练集的预测值
# 绘制散点图
ax2.scatter(y, y_pred, c='blue', alpha=0.6, edgecolor='k', s=50, label='预测值')
# 参考线:y=x(越靠近这条线,预测越准)
ax2.plot([y.min(), y.max()], [y.min(), y.max()], 'r--', lw=2, label='理想线(y=x)')
ax2.set_xlabel('实际反应速度')
ax2.set_ylabel('预测反应速度')
ax2.set_title('实际值 vs 预测值', fontsize=14)
ax2.legend()plt.tight_layout()
plt.show()# ----------------------
# 5. 模型评估
# ----------------------
from sklearn.metrics import mean_squared_error, r2_scoremse = mean_squared_error(y, y_pred) # 均方误差(越小越好)
r2 = r2_score(y, y_pred) # R²(越接近1越好)
print(f"均方误差(MSE):{mse:.2f}")
print(f"决定系数(R²):{r2:.2f}") # 接近1,说明拟合效果好
五、结果解读:决策树如何“拆解”非线性关系?
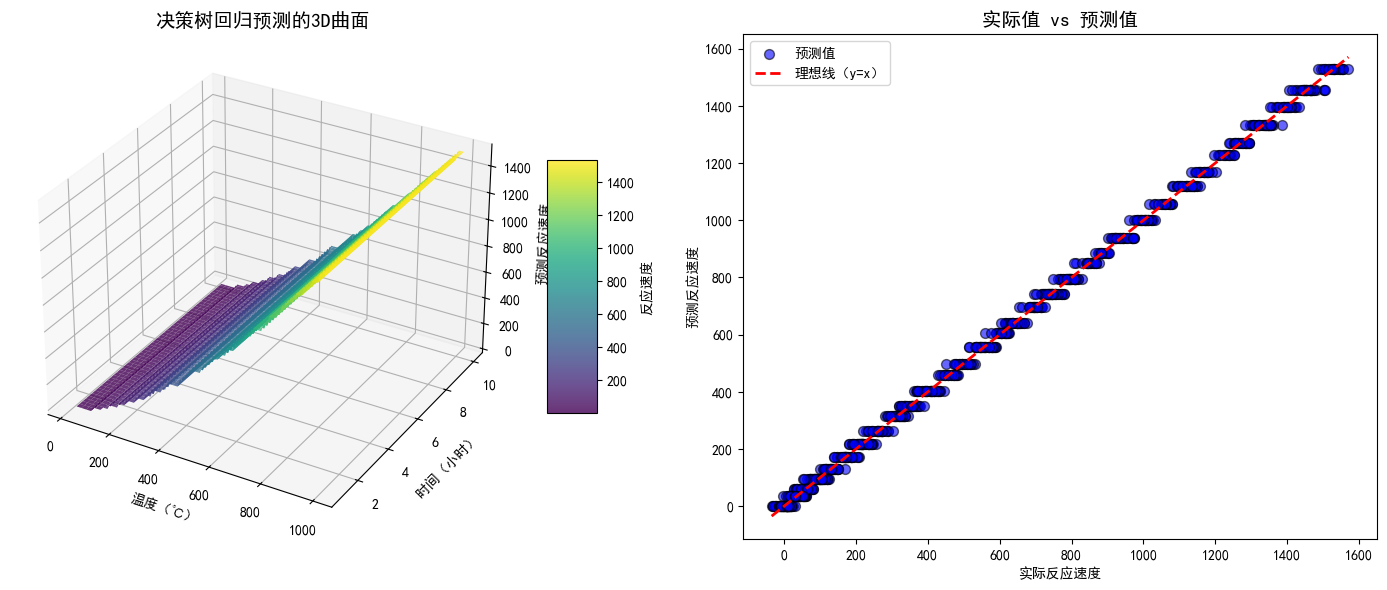
1. 3D曲面图:非线性关系一目了然
左图的3D曲面展示了决策树的预测结果:
- 温度较低时(比如20-500℃),反应速度随温度升高快速上升(曲面陡峭);
- 温度较高时(500-1000℃),反应速度上升变缓;
- 无论温度高低,时间越长,反应速度越低(曲面沿时间轴向下倾斜)。
这种分段变化的非线性关系,正是决策树通过多次分裂捕捉到的——每个小区域的预测值都是该区域的均值,组合起来就形成了贴合数据的平滑曲面。
2. 实际vs预测图:拟合效果直观判断
右图中,蓝色点越靠近红色虚线(y=x),说明预测值与实际值越接近。本例中,大部分点密集分布在虚线附近,R²接近0.9,说明决策树很好地拟合了数据规律。
六、避坑指南:决策树回归的“雷区”与调参
决策树回归虽好,但有个致命弱点:容易过拟合(树太深会记住噪声,泛化差)。这时候需要通过调参控制树的复杂度:
| 参数 | 作用 | 调优建议 |
|---|---|---|
max_depth | 树的最大深度(分裂次数上限) | 太小→欠拟合(拟合不充分);太大→过拟合,从3-5开始试,逐步增加至验证集效果最优。 |
min_samples_split | 分裂节点所需的最小样本数 | 太小→易过拟合;太大→难分裂,建议5-20。 |
min_samples_leaf | 叶节点的最小样本数(分裂后每个组的样本数) | 太小→叶节点太多(过拟合);太大→模型太简单,建议1-5。 |
总结:决策树回归的“最佳使用场景”
决策树回归是处理非线性回归问题的“实用工具”,尤其适合:
- 特征与目标的关系复杂(分段、弯曲、有交互);
- 需要模型可解释(能画出决策规则,业务人员能理解);
- 特征维度不高(太高维数据分裂后样本稀疏,效果下降)。
记住:决策树的核心是“分而治之”——把复杂问题拆成简单小问题,每个小问题用简单方法解决。这种思路不仅适用于机器学习,也是解决复杂问题的通用智慧。
你在项目中用决策树回归解决过哪些非线性问题?调参时有什么心得?评论区聊聊~