基恩士3D视觉用于ABB机器人的KeyenceRobotVisionSetup.sys系统模块程序解析(九、KeyAbsMove)
引言
KeyenceRobotVisionSetup.sys是基恩士3D视觉系统用于ABB机器人的系统模块程序,用于实现ABB机器人与视觉系统的交互,涉及相关通讯、参数的配置
下面先对KeyAbsMove程序进行解释,此程序用于将机器人移动到视觉系统指定的绝对位置,此过程与上篇文章重点KeyRelMove程序类似,但目标位置是绝对的(基于当前坐标系),而不是相对的。
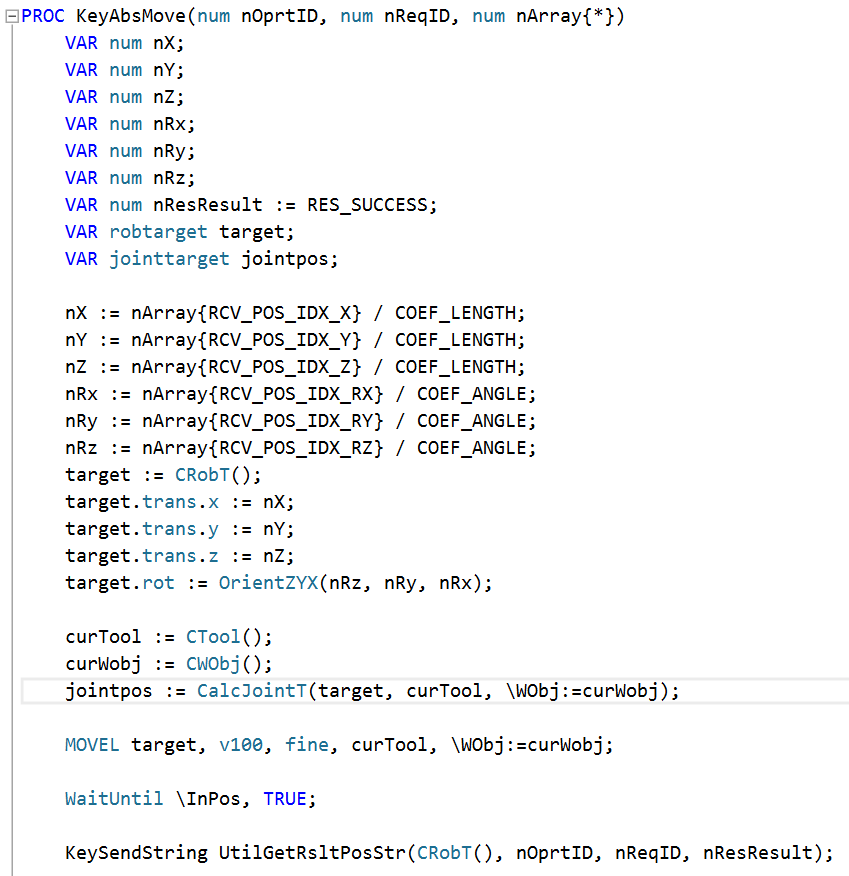
PROC KeyAbsMove(num nOprtID, num nReqID, num nArray{*})
-
作用:执行Keyence视觉系统发送的绝对移动指令(
OPID_ABS_MOVE=6) -
参数:
-
nOprtID:操作码(为OPID_ABS_MOVE=6) -
nReqID:请求ID -
nArray{*}:参数数组(包含绝对位置坐标)
-
变量声明:
VAR num nX, nY, nZ; ! XYZ绝对坐标(毫米)
VAR num nRx, nRy, nRz; ! 旋转绝对量(度)
VAR num nResResult := RES_SUCCESS; ! 结果状态
VAR robtarget target; ! 目标位置