130Kw双向储能PCS电源及关键技术分析
130Kw双向储能PCS电源



关键技术实现分析
模块化设计 (Modular Design):
- 物理结构: 每个130kW模块是一个独立单元,包含完整的功率电路(IGBT/MOSFET模块、直流支撑电容、交流滤波电感/电容、散热器)、控制板、驱动板、传感器(电压、电流、温度)、通信接口、风扇/风道。
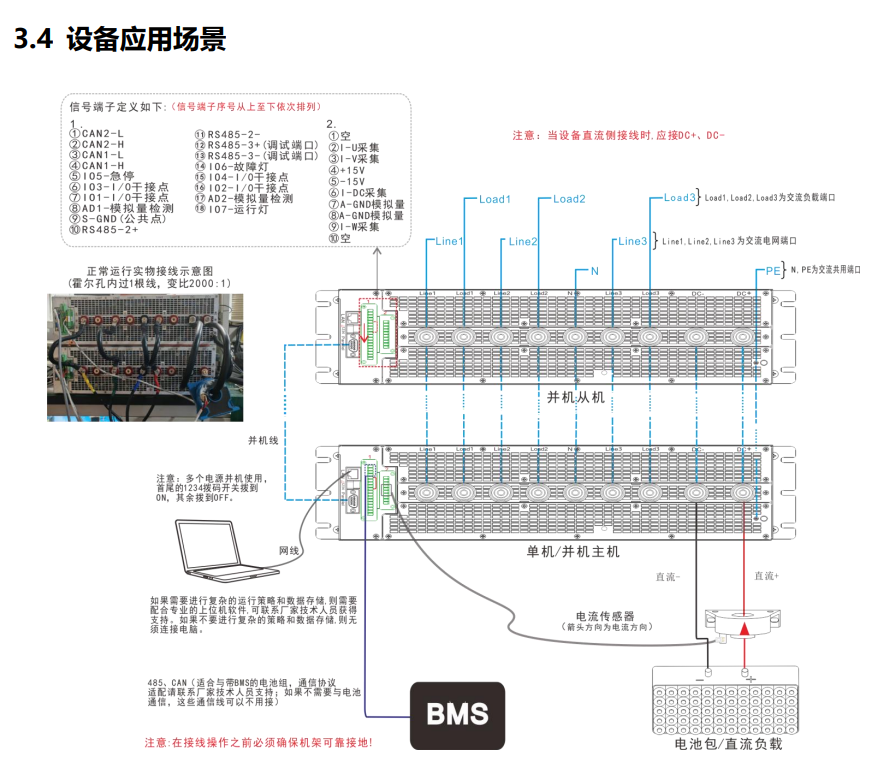
- 电气接口: 标准化的直流母线接口 (DC+, DC-, PE) 和交流输出接口 (L1, L2, L3/N, PE)。并联时,所有模块的直流母线直接并联,交流输出通过电抗器或共用母线并联。
- 控制接口: 标准化的通信接口 (CAN, EtherCAT, RS485/Modbus, Ethernet) 用于模块间通信和与上级控制器通讯。
- 优点: 易于扩展 (130kW -> 1.3MW)、维护方便(热插拔或模块更换)、提高系统冗余度(N+1)、灵活配置、批量生产降低成本。
先进控制算法实现多机并联 (Advanced Control Algorithms for Parallel Operation):
- 核心挑战: 实现多个模块精确均流、抑制环流、同步运行,尤其是在负载突变、电网扰动等动态工况下。
- 关键算法与技术:
- 均流控制 (Current Sharing Control):
- 下垂控制 (Droop Control): 最常用且可靠的无互联或弱互联方案。通过模拟发电机特性,根据输出电流/功率自动微调输出电压幅值或频率/相位角,实现自然均流。关键在于下垂系数的精确设定和协调。
关键代码:计算每个模块的功率/电流,根据设定的下垂系数调整输出电压指令。 - 主从控制 (Master-Slave Control): 一个模块作为主控,计算总电流指令并分配给各从模块。需要高可靠性通信。
关键代码:主模块计算总指令并分发;从模块接收指令并执行。 - 平均电流控制 (Average Current Control): 通过高速通信(如CAN/EtherCAT)交换各模块电流信息,计算平均值,各模块以平均值为目标进行调节。
关键代码:通信收发电流数据,计算平均值,调整电流环参考值。 - 环流抑制 (Circulating Current Suppression): 并联模块间由于参数差异(滤波器、线路阻抗)或控制微小误差产生的非负载电流。算法需检测并抑制这种电流。
关键代码:计算模块间电流差值,设计额外的补偿控制环(如零序电压注入)。
- 下垂控制 (Droop Control): 最常用且可靠的无互联或弱互联方案。通过模拟发电机特性,根据输出电流/功率自动微调输出电压幅值或频率/相位角,实现自然均流。关键在于下垂系数的精确设定和协调。
- 同步技术 (Synchronization):
- 锁相环 (Phase-Locked Loop - PLL): 每个模块都需要精确的PLL来跟踪电网电压相位和频率,这是实现并网和并联同步的基础。并联系统中,各模块PLL的性能和参数一致性至关重要。
关键代码:实现高性能PLL算法 (如 SRF-PLL, DSOGI-PLL)。 - 模块间同步信号: 可能需要一个公共的同步时钟信号(通过硬接线或高速通信)来确保各模块PLL或PWM载波严格同步,减少高频环流。
关键代码:同步信号的接收、处理和应用于PWM定时器。
- 锁相环 (Phase-Locked Loop - PLL): 每个模块都需要精确的PLL来跟踪电网电压相位和频率,这是实现并网和并联同步的基础。并联系统中,各模块PLL的性能和参数一致性至关重要。
- 虚拟同步机技术 (Virtual Synchronous Generator - VSG): 更先进的方案,让变流器模拟同步发电机的转动惯量和阻尼特性,增强系统稳定性,有助于实现更好的并联和电网支撑。
关键代码:模拟转子运动方程计算频率和相位,模拟励磁系统计算电压。
- 均流控制 (Current Sharing Control):
双向AC/DC功能 (Bidirectional Power Flow):
- 整流模式 (Rectifier Mode - AC->DC): 从电网吸收能量给直流侧(如电池充电)。
- 逆变模式 (Inverter Mode - DC->AC): 从直流侧(如电池、光伏)向电网或本地负载馈送能量。
- 控制核心: 基于坐标变换(Clark, Park)的双闭环控制。
- 外环 (Outer Loop): 控制直流母线电压 (整流模式) 或交流输出电压/功率 (逆变模式/离网模式)。
关键代码:电压外环PI控制器。 - 内环 (Inner Loop): 控制交流电流 (d轴和q轴分量)。通常采用电流解耦控制和前馈补偿。
关键代码:电流内环PI/PR控制器,解耦项计算,前馈补偿计算。 - 空间矢量脉宽调制 (Space Vector PWM - SVPWM): 高效生成驱动IGBT/MOSFET的PWM信号。
关键代码:扇区判断,矢量作用时间计算,PWM占空比生成。
- 外环 (Outer Loop): 控制直流母线电压 (整流模式) 或交流输出电压/功率 (逆变模式/离网模式)。
优良的负载适应性及电网适应性 (Load and Grid Adaptability):
- 负载适应性: 能稳定带各种类型负载(阻性、感性、容性、非线性负载如整流器),尤其是突加突卸负载时维持电压稳定。这依赖于快速响应的电流环和电压环,以及足够的过载能力设计。
关键代码:控制环参数整定(带宽、增益),过载检测与限流保护逻辑。 - 电网适应性:
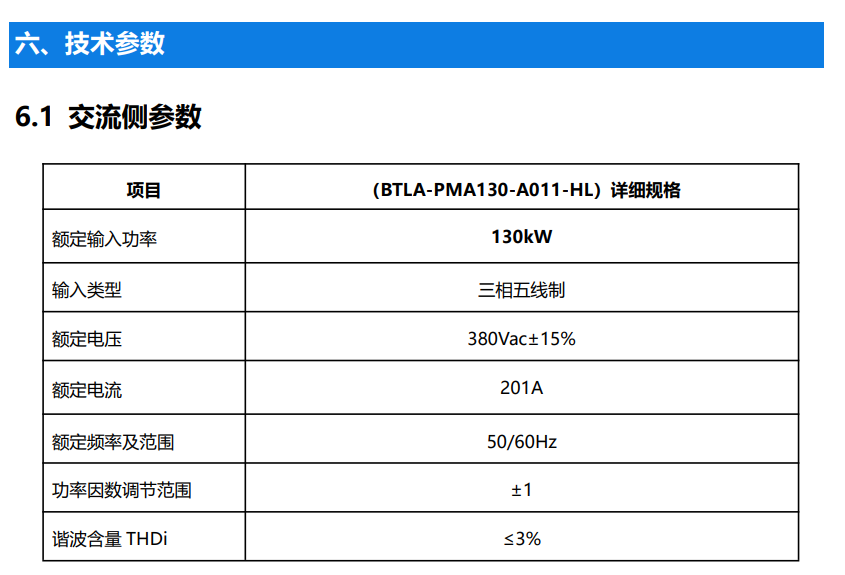
- 宽电压/频率范围: PLL和控制器能适应较大范围的电网电压和频率波动(如 ±10% V, ±2% Hz)。
关键代码:PLL的捕获和跟踪范围设定。 - 抗干扰能力: 能抵抗电网谐波、电压暂升/暂降、不平衡的影响。可能需要额外的谐波抑制算法或不平衡控制策略。
关键代码:PLL的谐波抑制能力,控制环中加入谐波补偿项,负序分量控制。 - 并网标准符合性: 满足并网标准 (如 IEEE 1547, GB/T, VDE-AR-N 4105) 对谐波含量 (THD)、功率因数 (PF)、高低电压穿越 (LVRT/HVRT)、频率穿越 (FRT)、无功功率调节能力等的要求。
关键代码:谐波计算与抑制算法,无功功率控制逻辑,LVRT/HVRT/FRT控制策略(切换到特定支撑模式)。
- 宽电压/频率范围: PLL和控制器能适应较大范围的电网电压和频率波动(如 ±10% V, ±2% Hz)。
- 负载适应性: 能稳定带各种类型负载(阻性、感性、容性、非线性负载如整流器),尤其是突加突卸负载时维持电压稳定。这依赖于快速响应的电流环和电压环,以及足够的过载能力设计。
本地监控与EMS远程调度 (Local Monitoring and EMS Remote Dispatch):
- 本地监控 (HMI/Controller): 模块内置控制器或通过独立HMI实现本地参数设置、状态显示(电压、电流、功率、温度、故障信息)、启停控制、模式切换等。
关键代码:人机交互界面驱动,数据采集与显示逻辑,本地控制指令解析与执行。 - 通信接口: 提供RS485/Modbus RTU, CAN, Ethernet (Modbus TCP/IP, CANopen over Ethernet, Profinet, EtherNet/IP), 可能还有无线模块 (4G/5G/NB-IoT)。
- EMS远程调度: 通过通信接口(通常是Ethernet或无线)连接到能源管理系统。EMS可以:
- 集中监控所有并联模块的状态和系统总功率。
- 远程设定系统运行模式(充电/放电/待机)、功率指令、电压指令、功率因数指令、充放电计划等。
- 接收告警和故障信息。
关键代码:通信协议栈实现 (Modbus, CANopen, MQTT等),数据点映射,指令解析与验证,安全访问控制。
- 本地监控 (HMI/Controller): 模块内置控制器或通过独立HMI实现本地参数设置、状态显示(电压、电流、功率、温度、故障信息)、启停控制、模式切换等。
独立风道设计 (Independent Air Duct Design):
- 物理结构: 模块内部设计有明确分隔的、密封性良好的风道。冷空气从特定入口进入,流经散热器(带走功率器件热量),热空气从特定出口排出。避免模块内部热空气回流或与其他模块热风混合。
- 风扇控制: 根据温度传感器(散热器温度、进风口/出风口温度、关键器件温度)动态调节风扇转速,平衡散热效果和噪音/功耗。
关键代码:温度采集,风扇PWM控制算法(如温度-PWM占空比查表或简单PI控制)。 - 优点: 提高散热效率,防止灰尘在敏感电路上堆积,适应高温、高湿、多尘等恶劣环境,增强环境适应性。
系统运行更安全、可靠、经济、环境适应性更强:
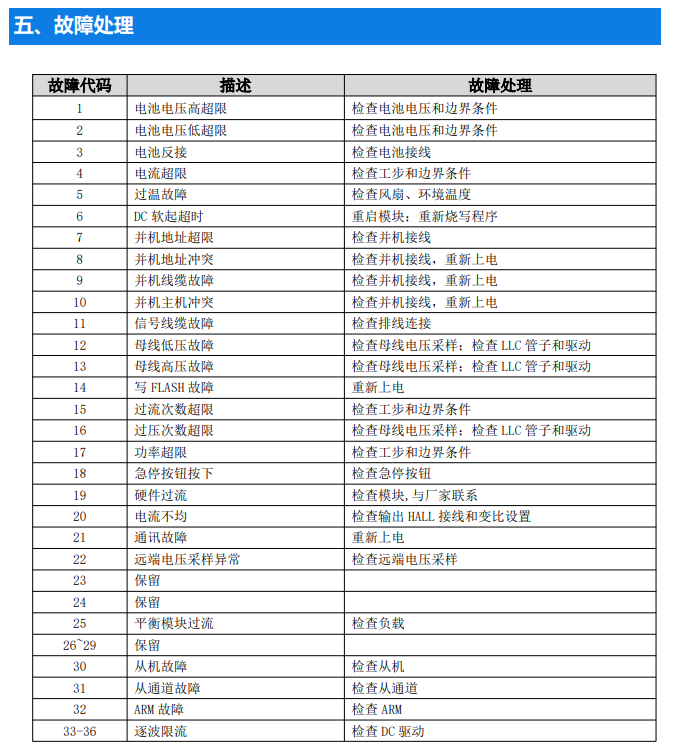
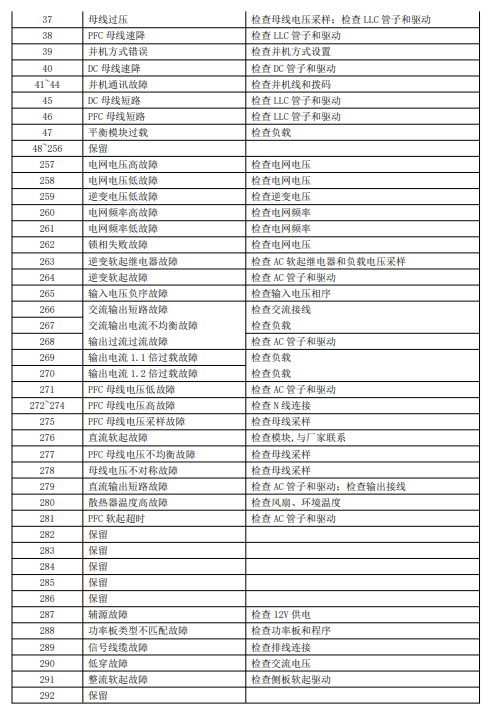
- 安全/可靠: 多重保护(过压、欠压、过流、短路、过温、风扇故障),模块化带来的冗余,高质量器件选择,严格测试,独立风道保障散热可靠性。
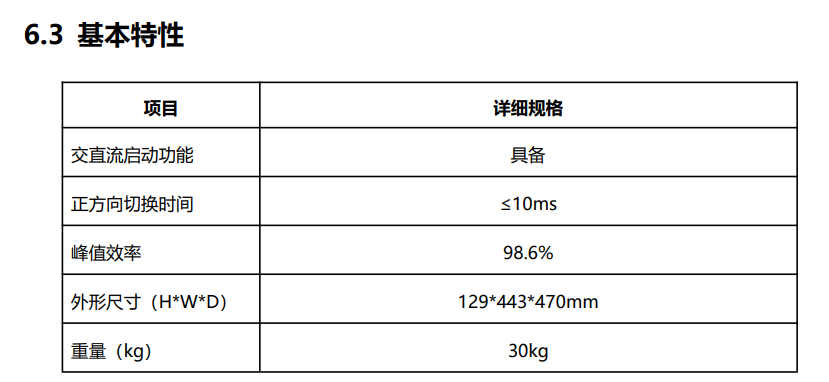
关键代码:快速保护中断服务程序,故障诊断与记录逻辑。 - 经济: 模块化设计降低初始投入(按需购买)和后期维护成本,高效率设计(>98%)降低运行损耗。
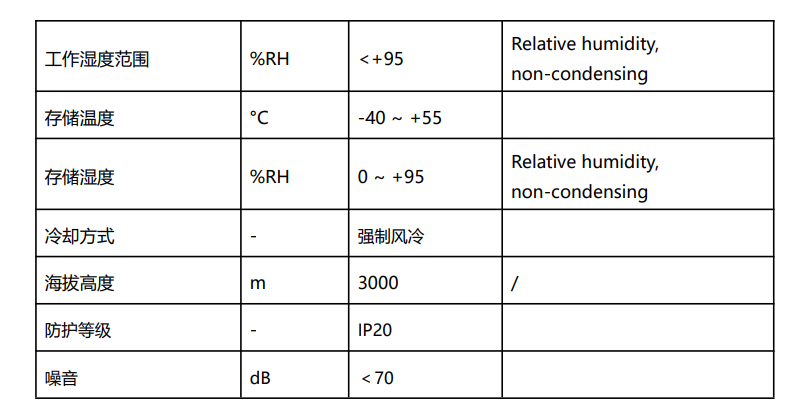
- 环境适应性: 独立风道设计、宽温度范围工作能力、防尘防水设计(如IP20/IP21内部,整机柜可达更高等级)共同作用。
- 安全/可靠: 多重保护(过压、欠压、过流、短路、过温、风扇故障),模块化带来的冗余,高质量器件选择,严格测试,独立风道保障散热可靠性。
关键代码结构与要点 (推测性)
核心代码通常运行在模块内置的高性能数字信号处理器 (DSP - 如TI C2000系列) 或微控制器 (MCU) 上,可能辅以FPGA处理高速PWM和捕获。采用实时操作系统 (RTOS) 或裸机编程。
主程序框架:
void main() {Hardware_Init(); // 初始化时钟、GPIO、ADC、PWM、通信接口、看门狗等Control_Parameters_Init(); // 初始化控制环参数、保护阈值等RTOS_Init(); // 如果使用RTOS,初始化任务和调度器while (1) {// 裸机下主循环或RTOS下低优先级任务Process_Communications(); // 处理本地HMI和远程EMS通信System_Monitoring_Diagnostics(); // 运行状态监测、故障诊断、记录Thermal_Management(); // 风扇控制等// ... 其他非实时性任务} }高优先级中断服务程序 (ISR) - 核心控制与保护:
- PWM定时器中断 (e.g., 10-20kHz): 这是控制的心脏。
__interrupt void PWM_ISR() {Read_ADC_Values(); // 高速同步采集所有相电压、相电流、直流电压、温度等Run_Protection_Checks(); // 快速过流、短路等保护判断,若触发立即封锁PWMif (Protection_Not_Triggered) {Run_PLL(); // 更新电网/输出电压相位角 thetaabc_to_dq_Transform(ia, ib, ic, theta, &id, &iq); // 三相电流转dq// 外环计算 (根据模式: Vdc控制 / P/Q控制 / Vf控制)if (Mode == Rectifier) {Vdc_ref = ...; // 可能来自本地设定或EMSid_ref = Vdc_Controller(Vdc_ref, Vdc_meas);} else if (Mode == Inverter_Grid) {Pref = ...; // 来自EMS或本地Qref = ...;id_ref = Power_Controller(Pref, P_meas); // 或直接id_ref = Pref / Vdiq_ref = Power_Controller(Qref, Q_meas); // 或iq_ref = -Qref / Vd} else if (Mode == Inverter_Standalone) {Vac_ref = ...;iq_ref = Vac_Controller(Vac_ref, Vac_meas); // 通常控制q轴电压 (幅值)// d轴可能用于控制有功平衡或固定为0}// 内环计算 (电流环)Vd_ref = Current_Controller_d(id_ref, id_meas) + Feedforward_d + ... + Decoupling_d;Vq_ref = Current_Controller_q(iq_ref, iq_meas) + Feedforward_q + ... + Decoupling_q;// 并联均流算法在此集成:可能修改Vd_ref/Vq_ref (下垂) 或id_ref/iq_ref (主从/平均)Apply_Parallel_Control(&Vd_ref, &Vq_ref, &id_ref, &iq_ref);dq_to_abc_Transform(Vd_ref, Vq_ref, theta, &Va_ref, &Vb_ref, &Vc_ref); // dq转三相电压Run_SVPWM(Va_ref, Vb_ref, Vc_ref); // 计算并更新PWM占空比} else {Force_PWM_Off(); // 保护触发,封锁驱动}Clear_Interrupt_Flag(); } - ADC采样完成中断: 有时用于触发计算,但更常见的是在PWM ISR中同步读取。
- 故障保护中断 (高优先级): 硬件比较器触发,用于最紧急的保护(如直通短路),直接封锁驱动,然后再通知软件处理。
关键代码:立即设置硬件保护锁存,关闭所有PWM输出。
- PWM定时器中断 (e.g., 10-20kHz): 这是控制的心脏。
关键算法函数实现:
PLL(): 实现锁相环算法 (如SRF-PLL, DSOGI-FLL/PLL)。abc_to_dq_Transform(),dq_to_abc_Transform(): Clark/Park变换及其逆变换。Vdc_Controller(),Vac_Controller(),Power_Controller(): 通常为PI控制器,包含抗饱和处理。Current_Controller_d(),Current_Controller_q(): 电流环PI或PR控制器,可能包含解耦项计算和前馈项计算。Run_SVPWM(): 实现SVPWM算法,计算各相桥臂的导通时间。Apply_Droop_Control()/Apply_MasterSlave_Control()/Apply_Average_Control(): 实现具体的并联均流策略。Calculate_Power(),Calculate_THD(): 计算有功、无功、视在功率、谐波含量等。LVRT_Handler(),HVRT_Handler(): 高低电压穿越策略处理函数。
通信处理任务/模块:
- 实现选定的通信协议栈 (Modbus, CANopen, MQTT Client等)。
- 定义和维护数据点映射表 (如Modbus寄存器映射)。
- 解析接收到的指令 (设置点、模式切换),进行有效性检查,并安全地传递给控制环。
- 周期性地或事件触发地发送状态数据、告警信息给本地HMI或远程EMS。
热管理函数:
void Thermal_Management() {Read_Temperatures(heatsink_temp, inlet_temp, ...);// 简单查表法pwm_duty = Temp_To_FanPWM_Lookup(heatsink_temp);// 或简单PI控制fan_error = heatsink_temp_setpoint - heatsink_temp;fan_pi_integral += fan_error * dt;pwm_duty = Kp_fan * fan_error + Ki_fan * fan_pi_integral;pwm_duty = constrain(pwm_duty, 0, MAX_PWM); // 限制范围Set_Fan_PWM(pwm_duty); }
总结
这款130kW双向AC/DC变流器模块的技术实现核心在于:
- 硬件层面: 高性能功率器件、精密传感器、高速处理器、模块化结构、独立风道散热设计。
- 软件/算法层面:
- 基础: 高性能PLL、坐标变换、双闭环控制 (电压/电流)、SVPWM。
- 关键特性: 先进的多机并联均流与环流抑制算法(下垂/主从/平均)、VSG技术。
- 核心能力: 实现宽范围负载和电网适应性的鲁棒控制算法(快速响应、抗扰、谐波抑制、不平衡控制、LVRT/HVRT)。
- 智能管理: 本地监控与远程调度通信协议栈、智能热管理风扇控制。
- 安全保障: 多层次、快速响应的保护机制(硬件+软件)。
其代码结构高度模块化、实时性强,核心控制算法运行在高优先级中断中以保证响应速度,通信和监控运行在较低优先级任务中。虽然具体代码不可见,但上述分析勾勒出了其实现复杂功能和卓越性能所依赖的技术骨架和关键代码逻辑。