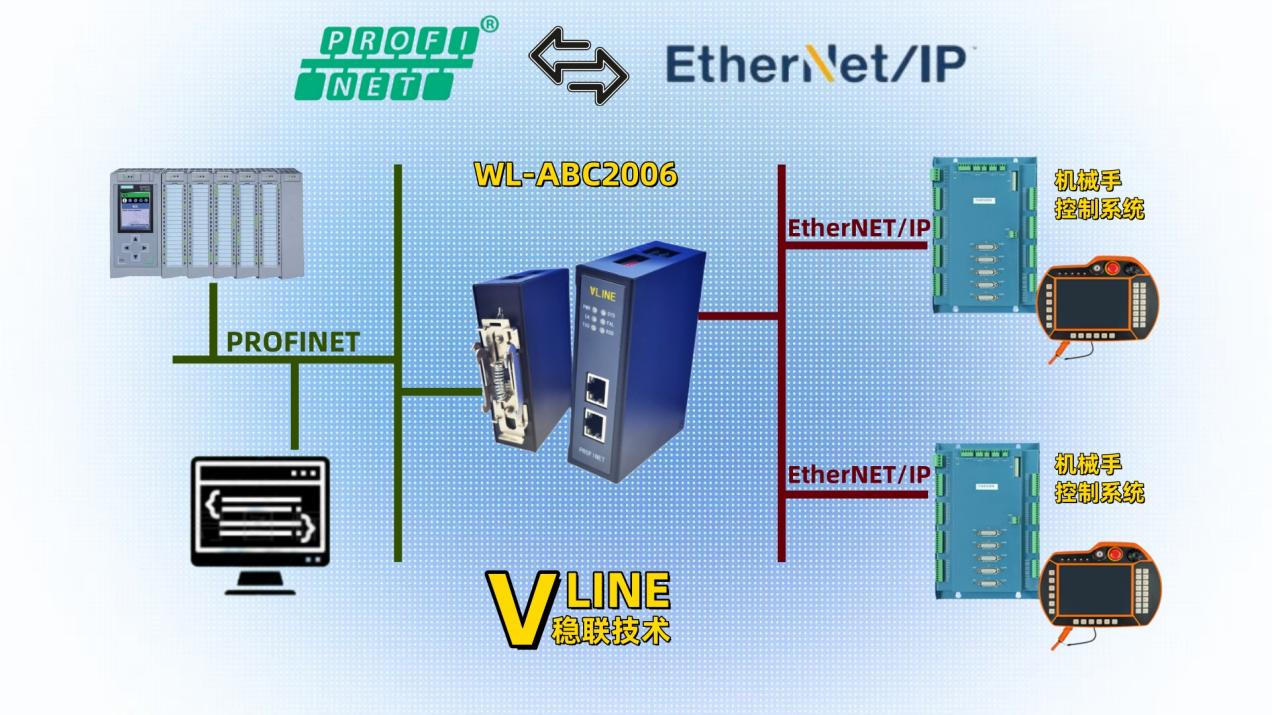
Profinet转Ethernet IP网关接入五轴车床上下料机械手控制系统的配置实例
本案例为西门子1200PLC借助PROFINET转EtherNet/IP网关与搬运机器人进行连接的配置案例。所需设备包括:西门子1200PLC、Profinet转EtherNet/IP网关以及发那科(Fanuc)机器人。
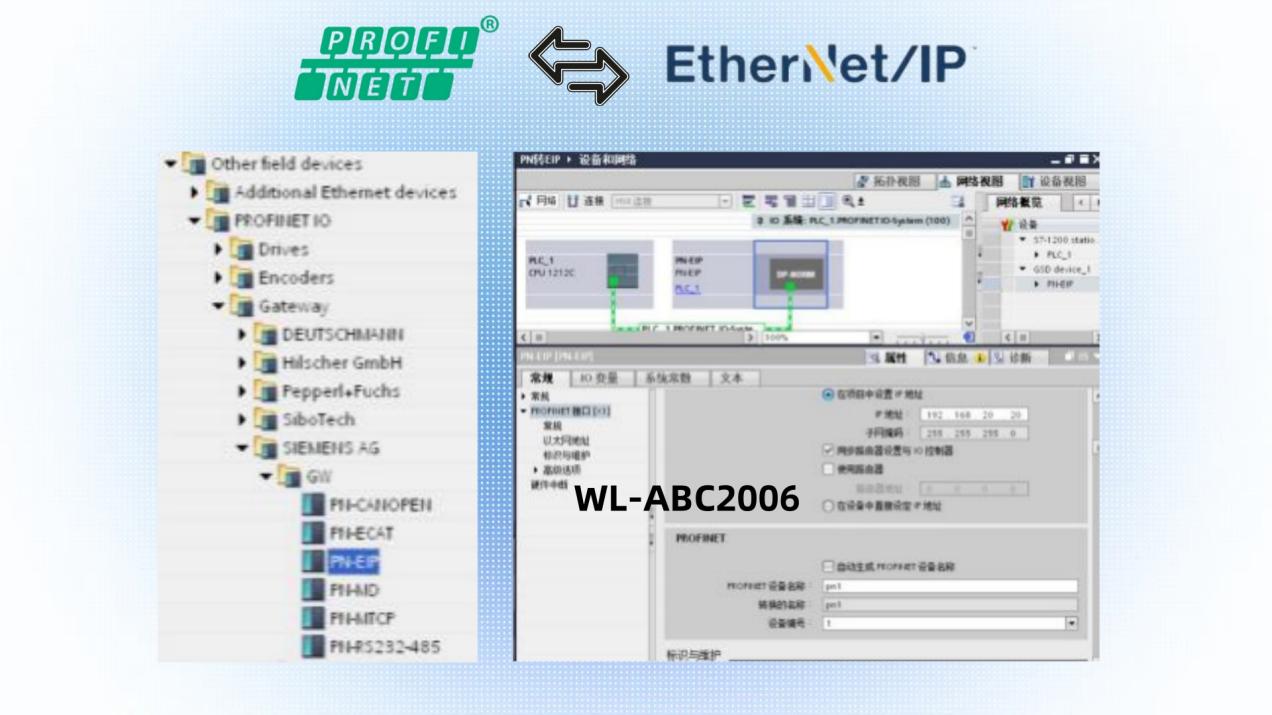
开启在工业自动化控制领域广泛应用、功能强大且专业的西门子博图配置软件。待软件界面准备妥当后,导入包含网关设备关键配置信息、对系统准确运行至关重要的网关GSD文件。

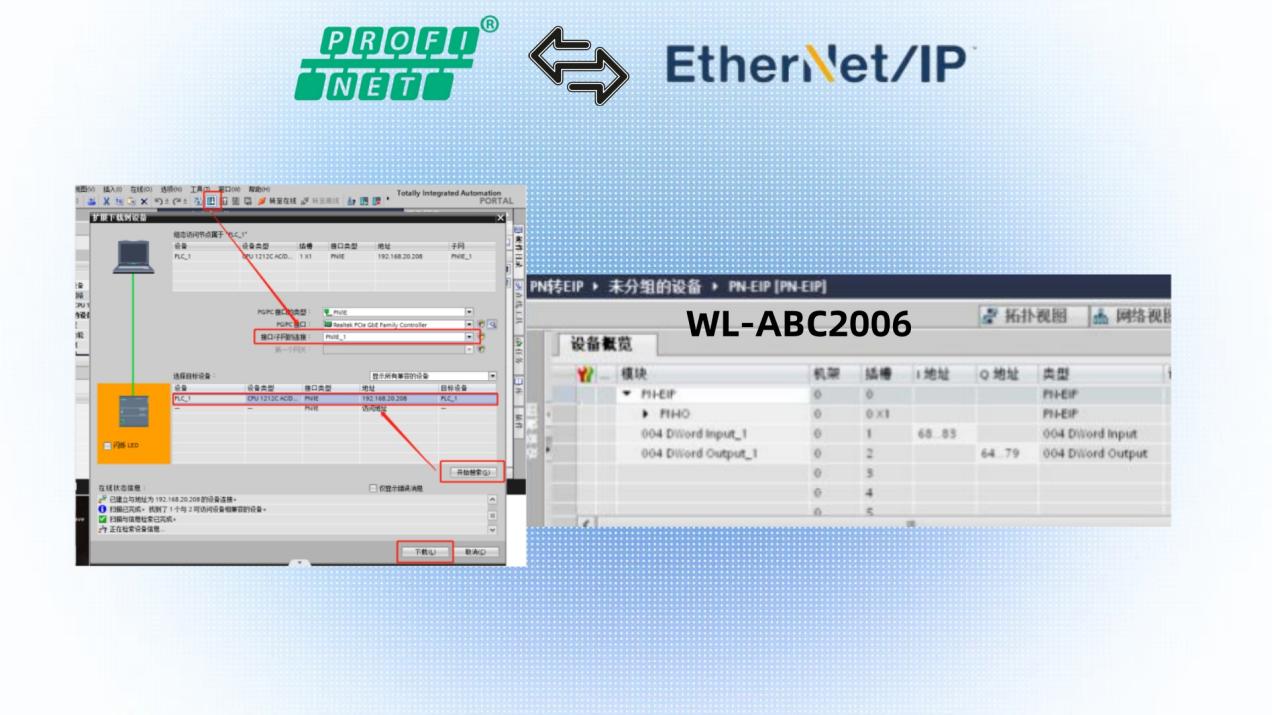
设定发送与接收数据的长度(可增添更大的长度值),将组态下载至可编程逻辑控制器(PLC)
为确保机器人能够正常接入网络并实现与其他设备的有效通信,需要对机器人的IP地址进行精准设置。具体操作时,先找到机器人的设置界面入口,通常可以通过特定的操作指令或者界面按钮进入。打开机器人的设置菜单后,在众多的选项中仔细定位到与主机通讯相关的选项,该选项包含了关于网络连接以及IP地址配置等关键信息。

Assemblyinstance的输入输出为100/150。
若设备无法导入eds文件,可从网关的eds文件中查找相关参数。
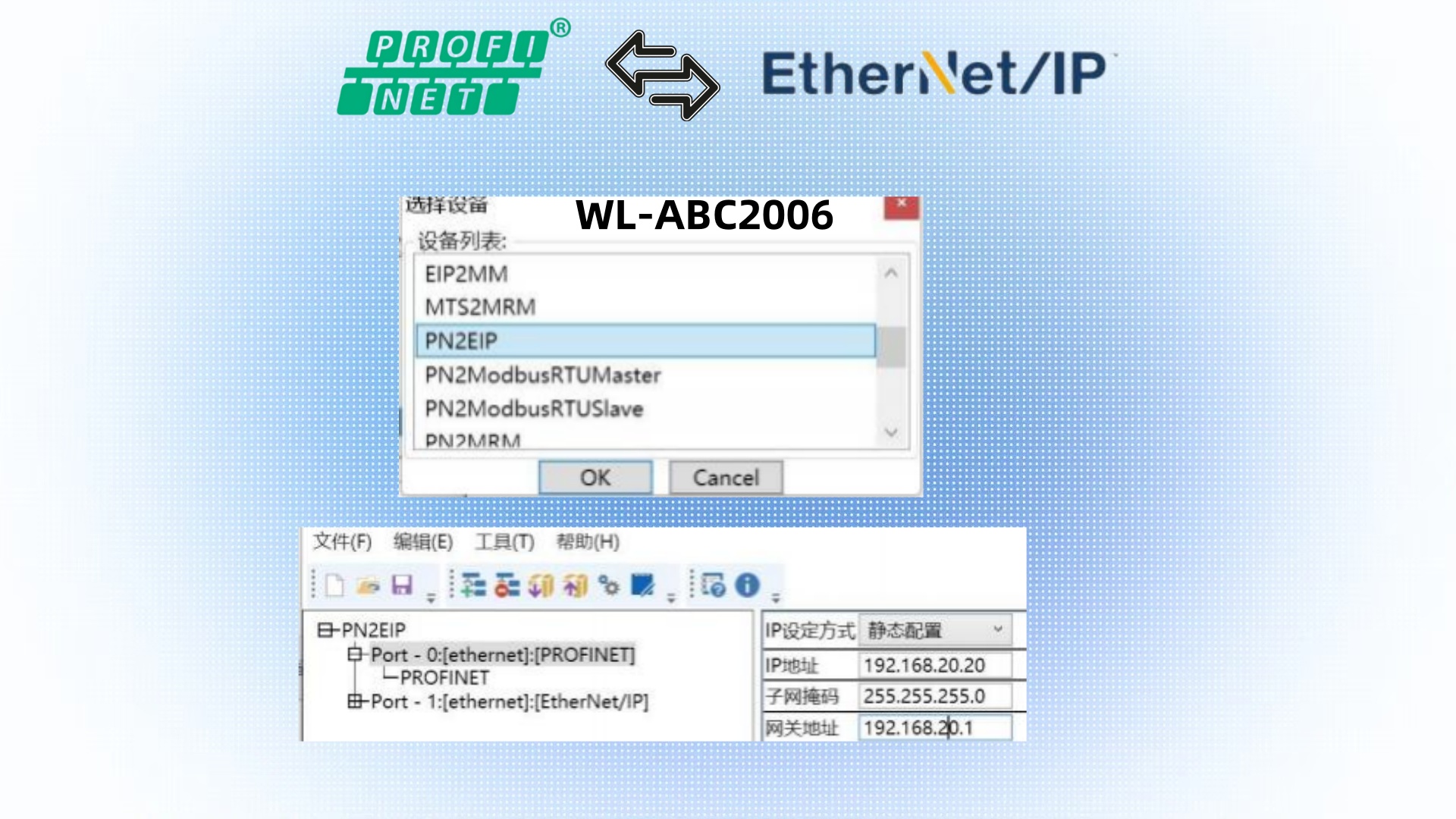
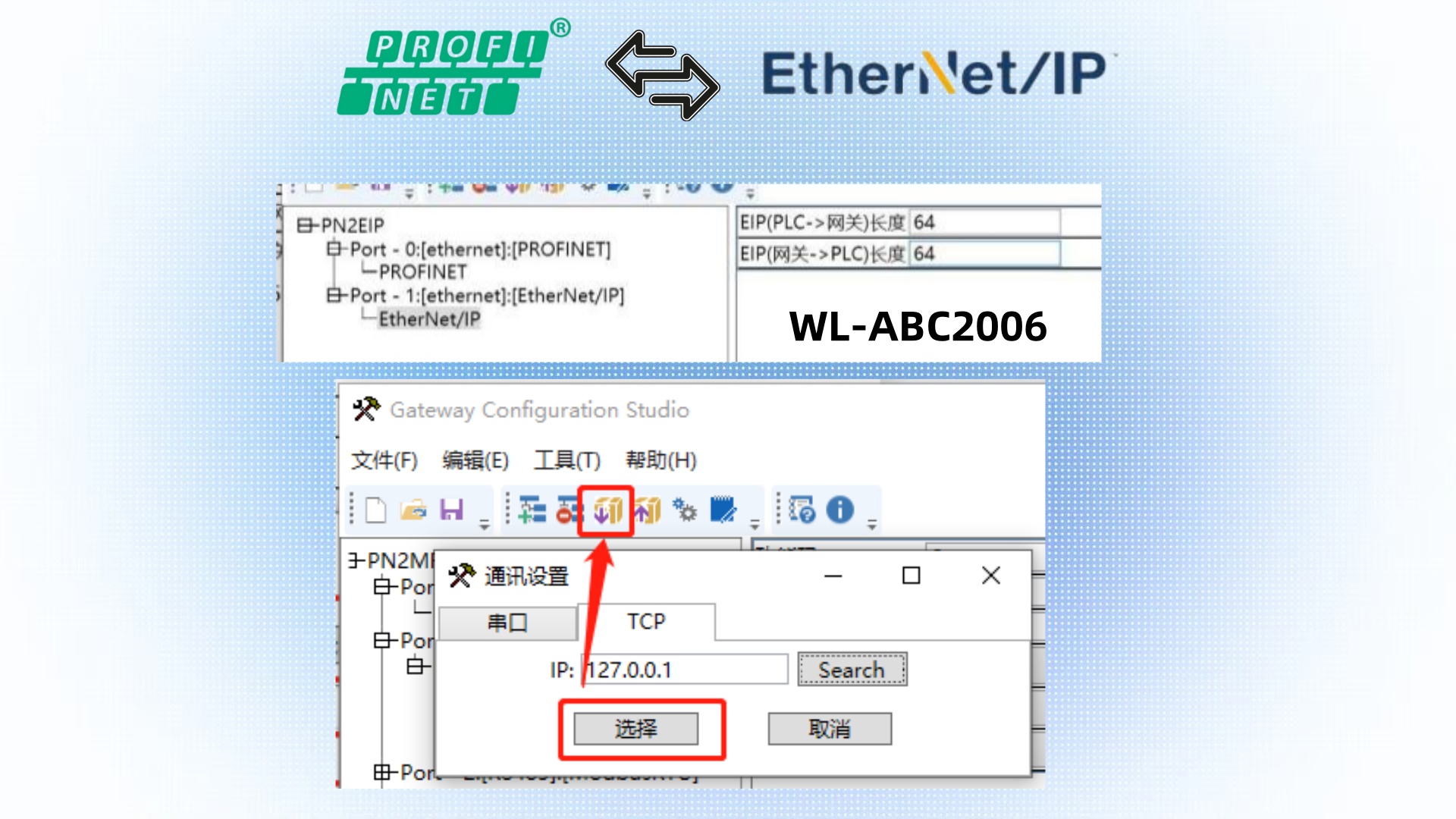
开启网关配置软件,鉴于网关充当EtherNet从站,故选择PN2EIP,对网关Profinet端的IP地址及设备名称进行设置(需与博图组态保持一致)。
数据长度为64字节(机器人设置为32个字所以要换算为64字节保持一致)
设置网关在EtherNet端的IP地址,设置网关在EtherNetIP中的数据长度
综上所述,可编程逻辑控制器(PLC)利用 Modbus 转 EtherNET IP 网关达成与五轴机器手臂的通信案例,为工业自动化技术发展的一个典型范例。借助 Modbus 转 EtherNET IP 网关,能够实现不同设备的兼容,进而提高工业自动化系统的可靠性和安全性。