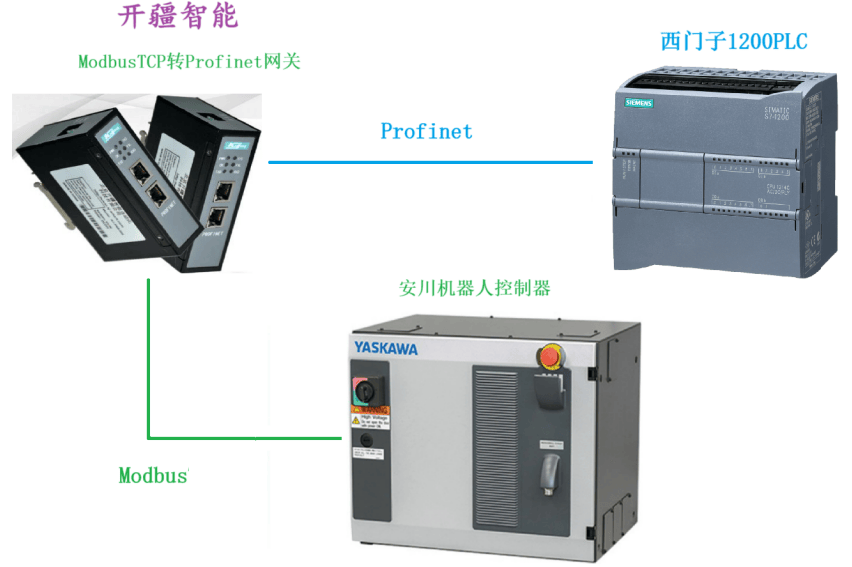
开疆智能ModbusTCP转Profinet网关连接安川YRC1000机器人配置案例
本案例是通过ModbusTCP转Profinet网关将西门子PLC与安川机器人连接进行数据交换。
达到用PLC来控制机器人的目的。
配置方法:
机器人侧设定
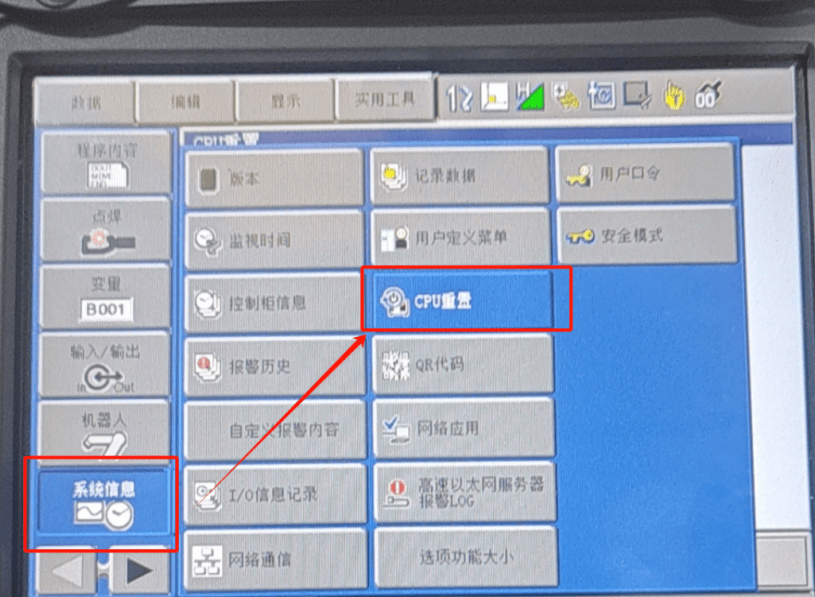
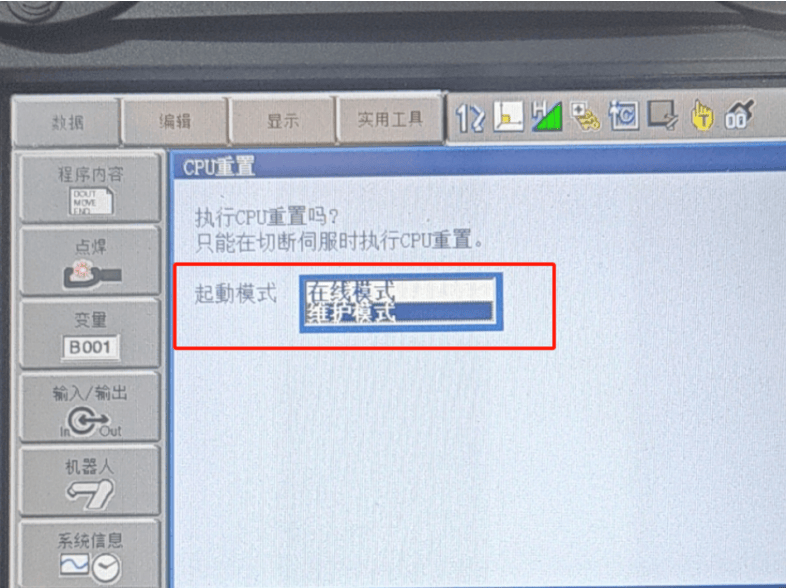
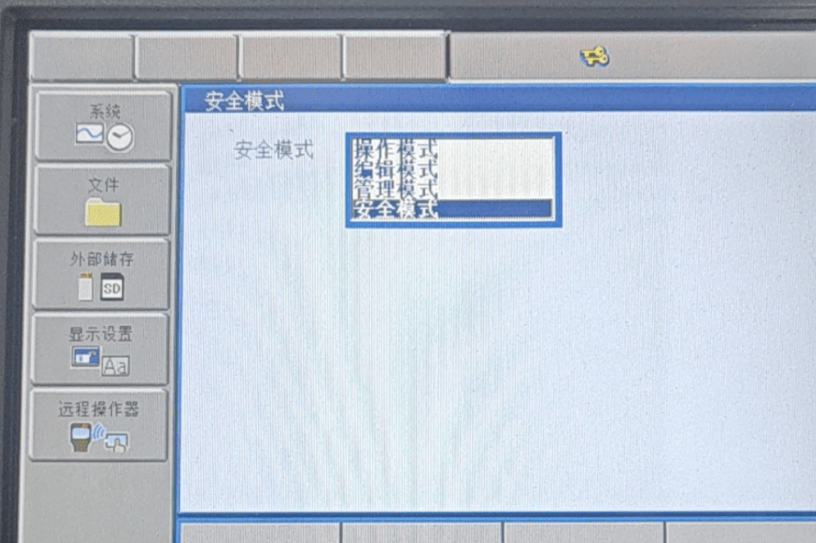
机器人进入维护模式,随后进入安全模式。

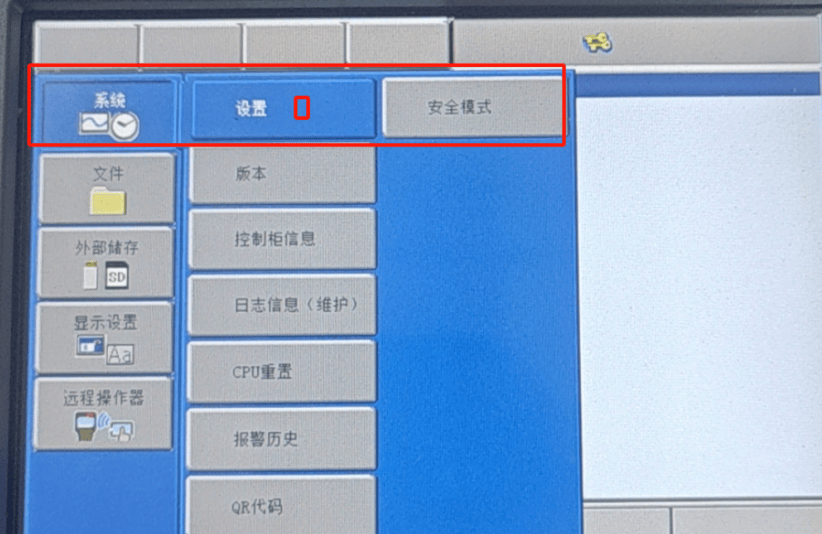
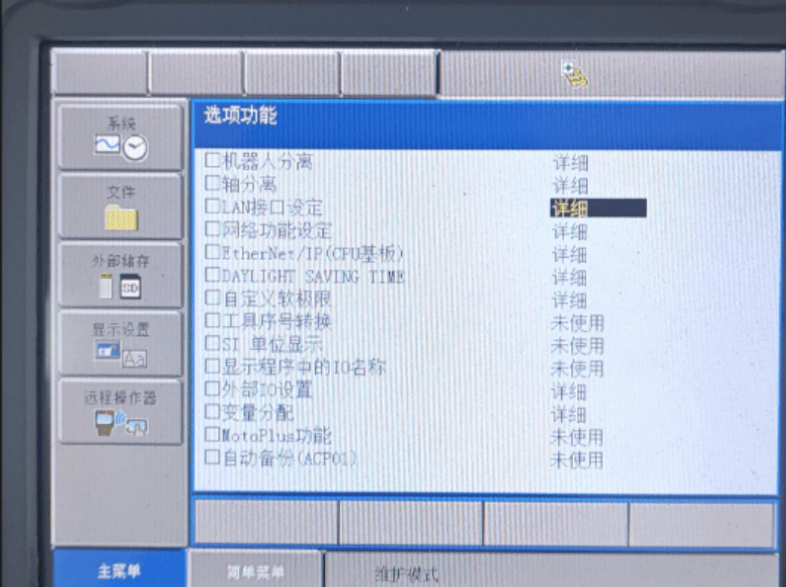
进入设置-选项功能-LAN接口设定-设置需要的IP
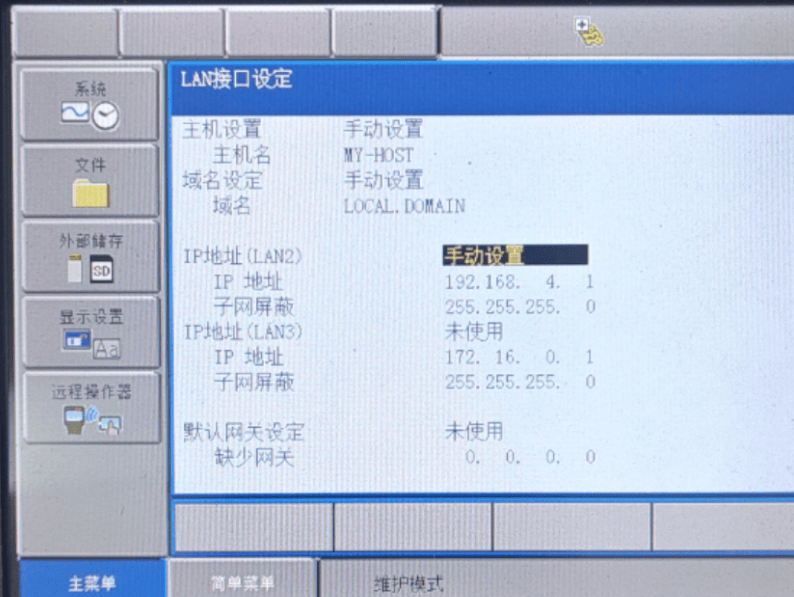
设置机器人LAN2口IP为192.168.1.48注意:机器人IP设定需要和PLC的IP同属一个网段,插网线的时候LAN2口和LAN3口不要插错了。
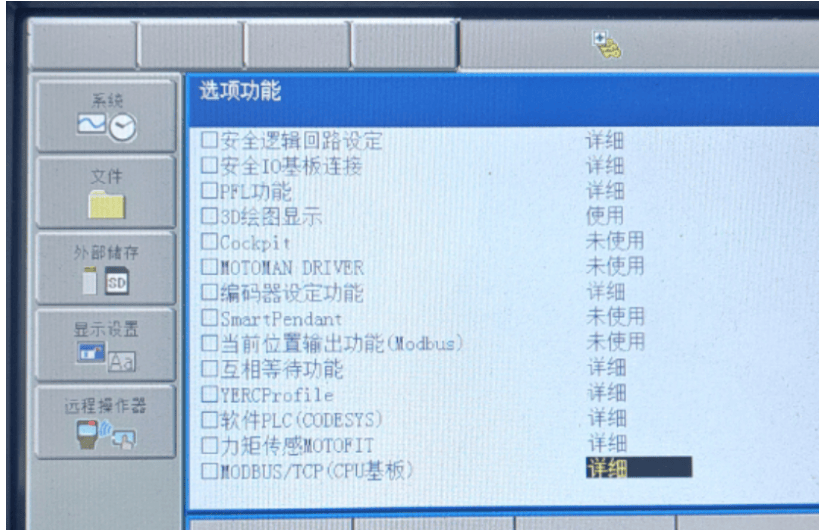
进入设置-选项功能-MODBUS/TCP(CPU基板)进行参数的设置
选择系统、设置、选项功能,找到 MODBUS/TCP(CPU 基板 。
(如果未找到此功能,则控制柜版本需要升级YAS4.71.00 00 以上,另外启用此功能需另行
开通)
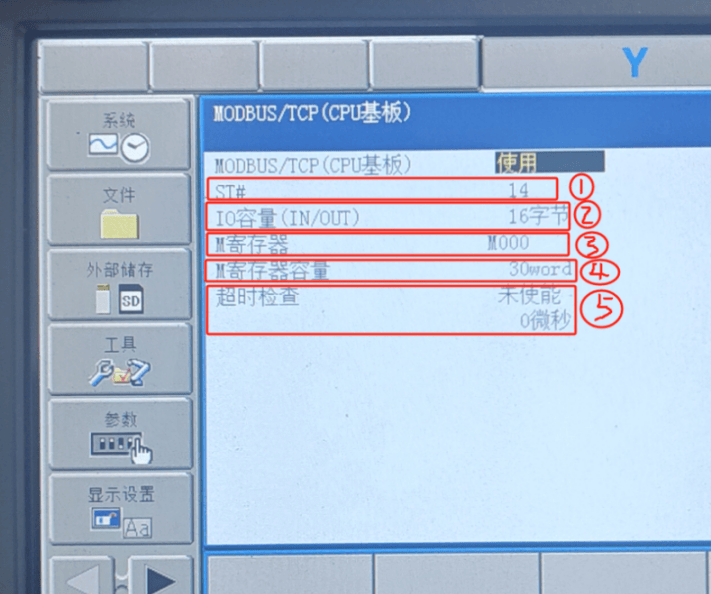
① ST #
设定本功能分配的IO模块的工位编号。请设定1~14中还没有分配IO模块的编号。
②IO大小(IN/OUT)
设定IO区域保留的IO大小(单位:byte)。可设定的最大值为506 byte(4048点)。
③M寄存器
设定寄存器数据收发使用的M寄存器起始序号。可设定的值为0~999。
④M寄存器大小
设定寄存器数据收发使用的M寄存器的个数。若指定为0个,则不收发寄存器数据。“M 寄存器”+“M 寄存器大小”可设定的合计值为0~1000。
⑥超时检查
设定是否检查PLC发出的通信指令的无通信时间。每按一次[选择]键,“有效”“无效”交替切换。若要进行检查,请设定为“有效”。
在设定为“有效”的状态下,若无通信时间超过设定值,通信状态的通信异常位便会变为ON。
此后,若接收到PLC通信指令,则使通信状态的通信异常位变为OFF,重新开始超时检查。
请设定无通信时间的超时值(单位:msec)。
可设定值为1~65535,超时检查的精度为2msec。
设置完成后回车确认修改,多次按回车键确认修改。
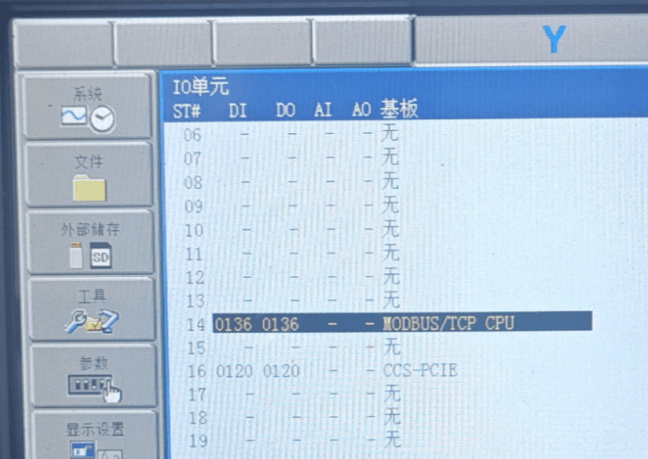
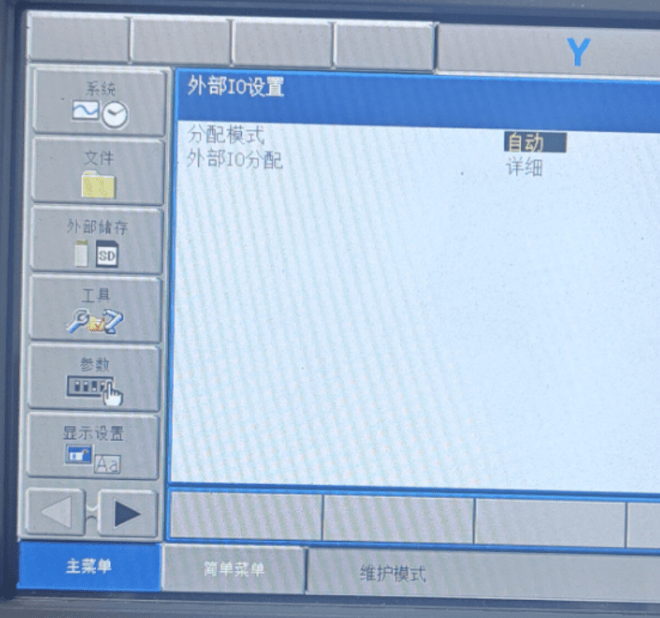
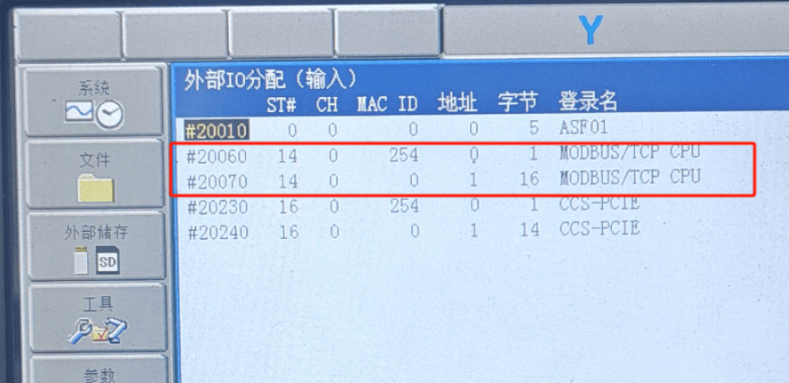
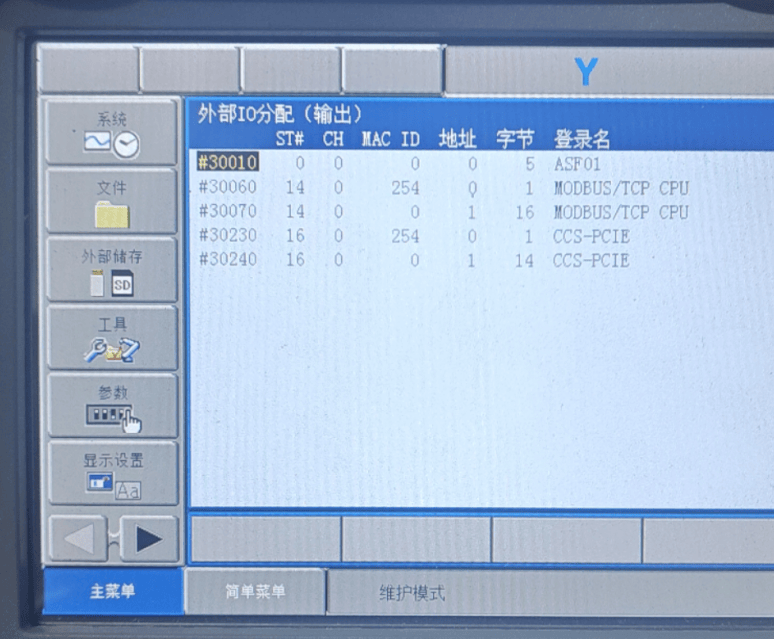
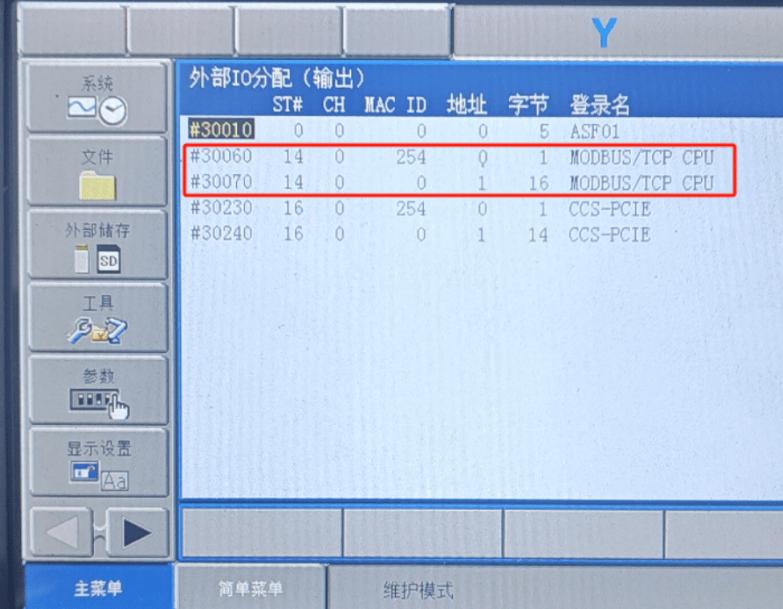
选择分配模式自动分配,选择外部IO分配-详细,查看IO分配
按回车键,确认修改内容,随后重启机器人到在线模式。
网关配置
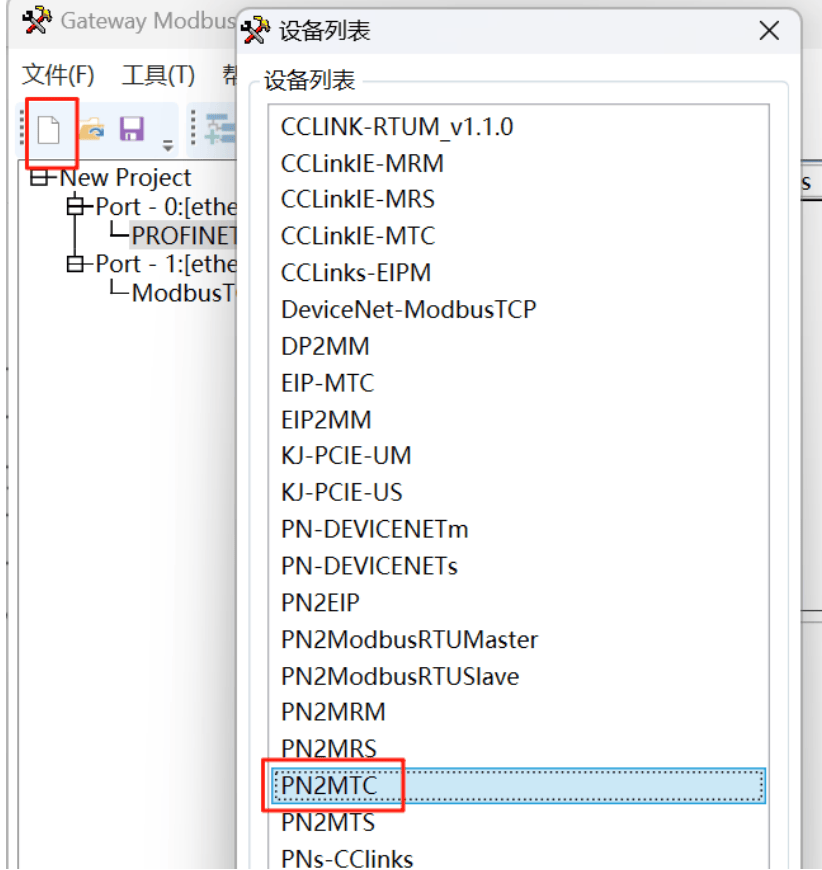
机器人配置完成后,打开网关配置软件“Gateway Configuration Studio”新建项目“PN2MTC”
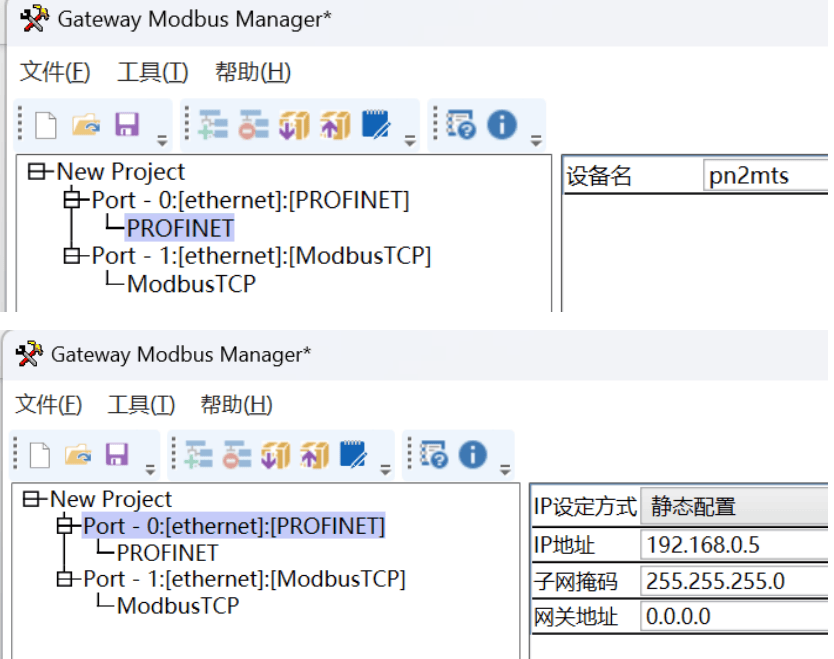
设置网关在Profinet一侧的设备名称与IP地址,与PLC一侧组态配置保持一致。
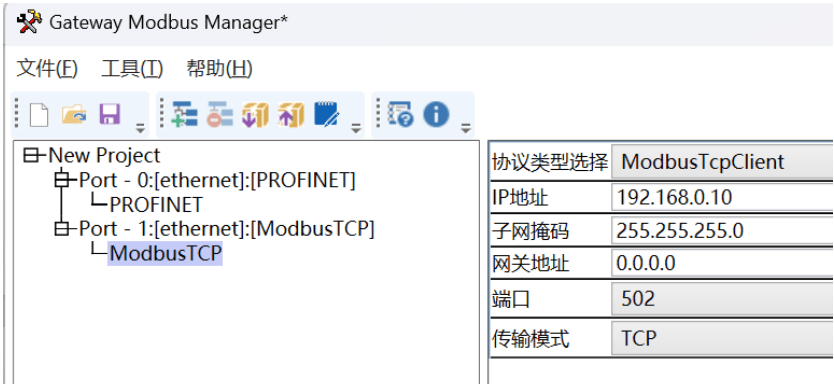
设置网关作为ModbusTCP客户端的IP地址,与机器人保持同一网段。
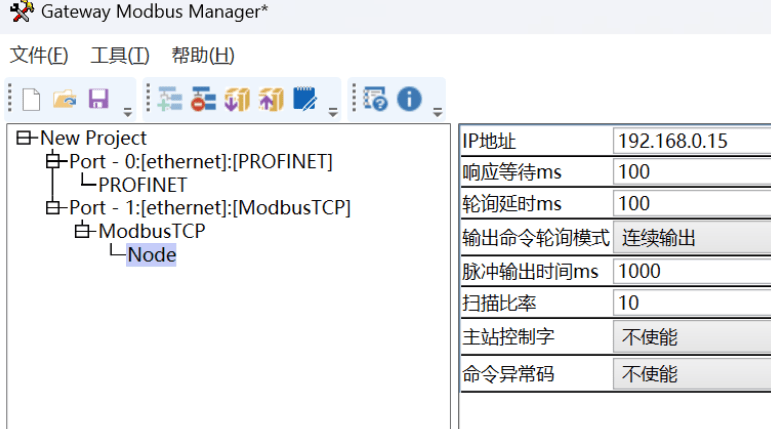
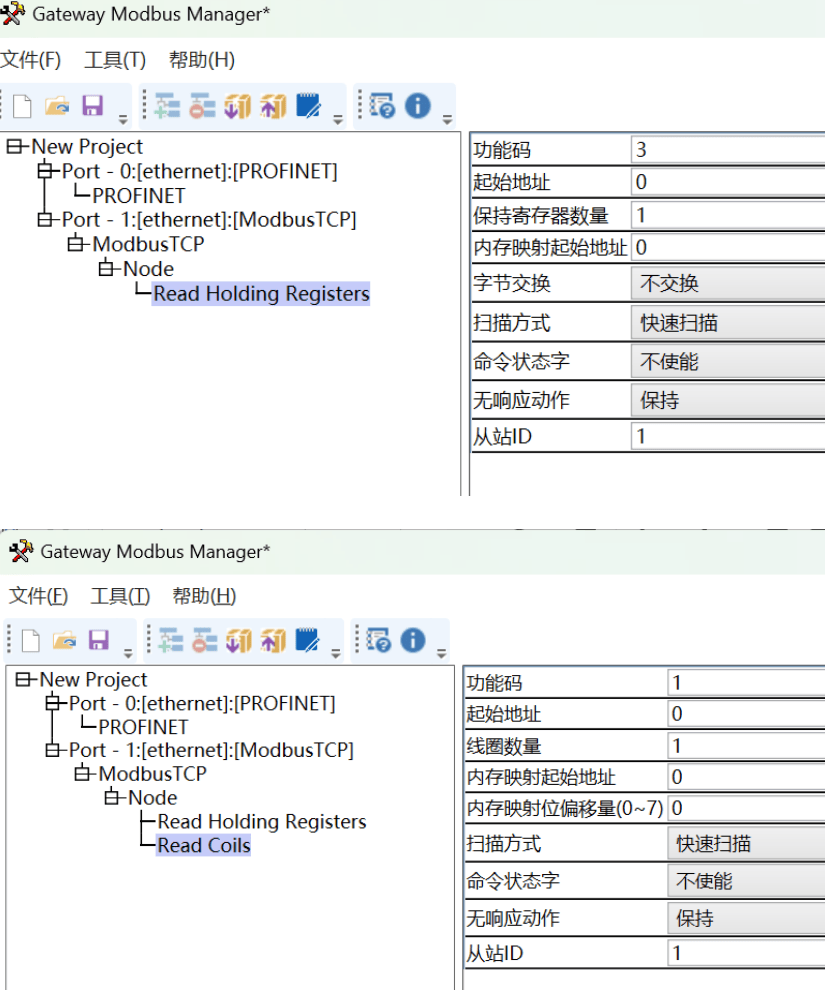
添加Node并填写机器人IP地址,并设置读写时间参数。
选择需要用到的功能码用于对机器人进行读写。
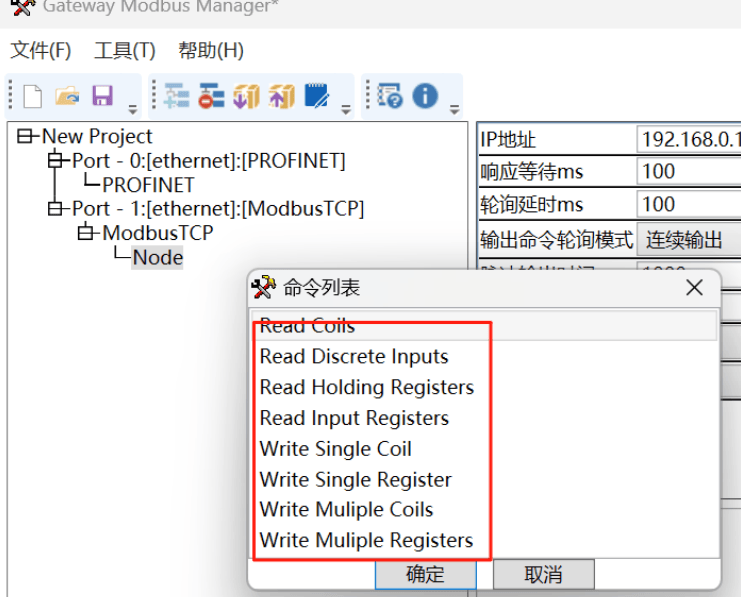
根据需要填写对应的寄存器地址与数量
确认好要读写的功能码与寄存器参数后下载配置进网关即可。
PLC配置
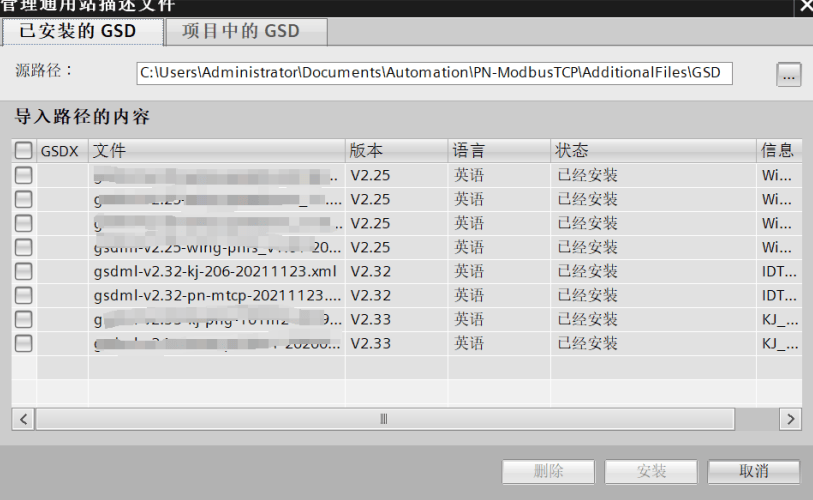
打开西门子PLC组态软件博图设置网关Profinet一侧的参数配置,首先导入网关GSD文件并设置PLC的IP地址
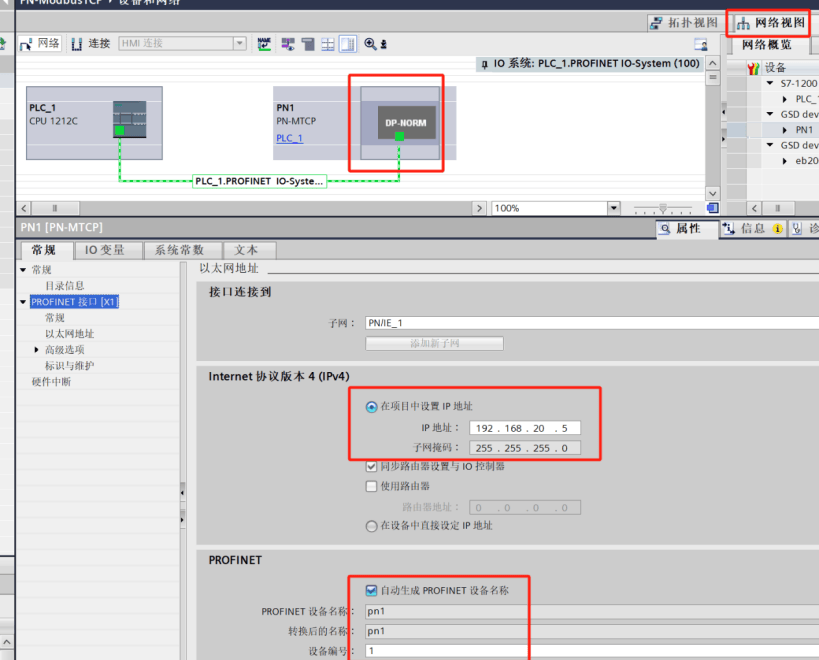
在网络视图中点击模块,设置网关的IP地址和设备名称
添加网关用到的数据输入输出长度
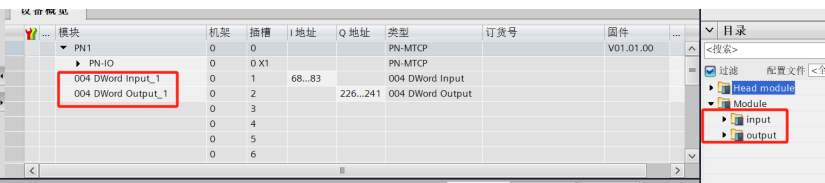
设置好分配的IQ地址,确认无误后下载到PLC
到此网关通讯配置全部完成,所有设备全部上电即可正常工作。