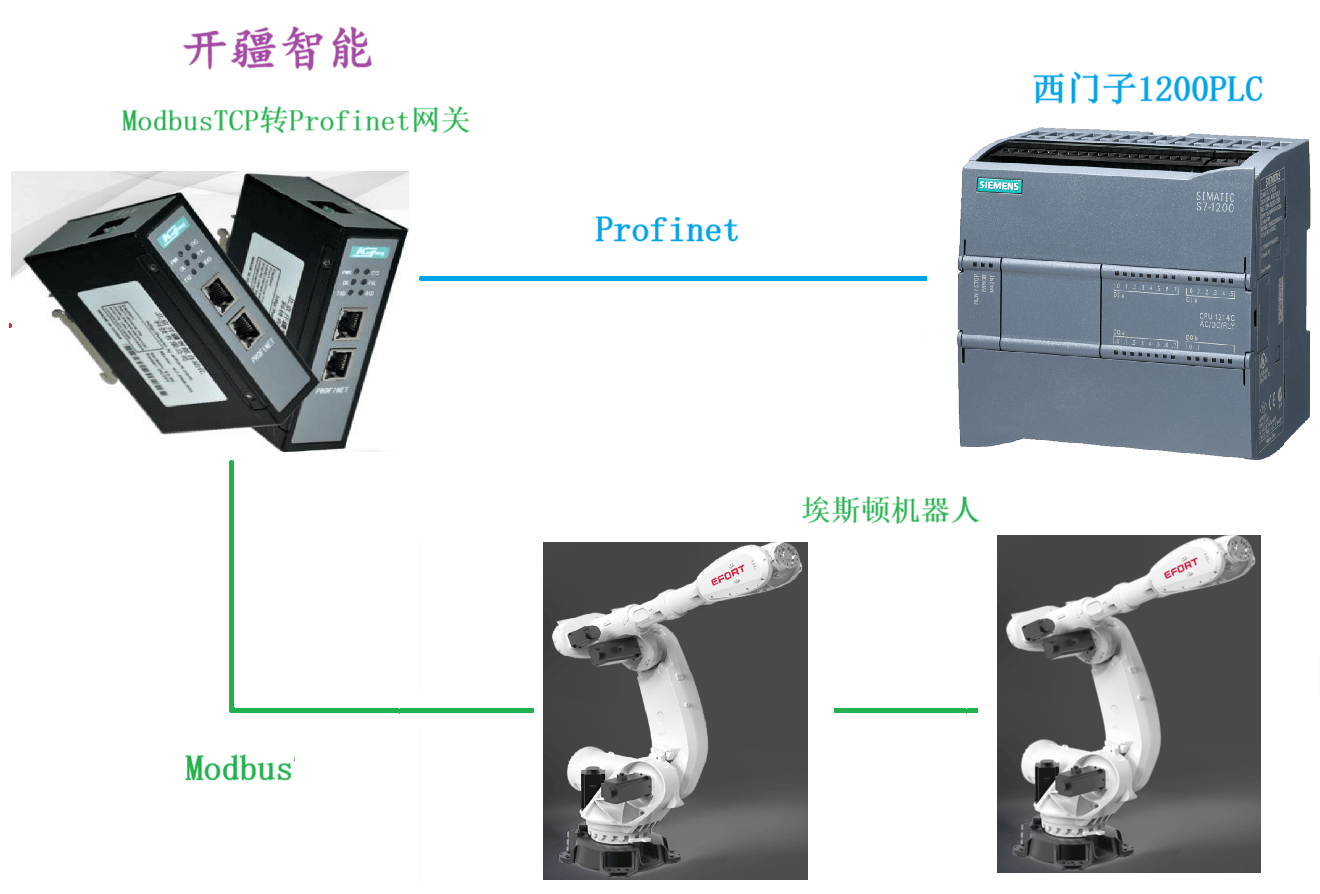
开疆智能ModbusTCP转Profient网关连接ER机器人配置案例
本案例时西门子1200PLC通过ModbusTCP转Profinet网关连接埃斯顿机器人的配置案例,网关作为ModbusTCP的客户端连接机器人。
配置过程:
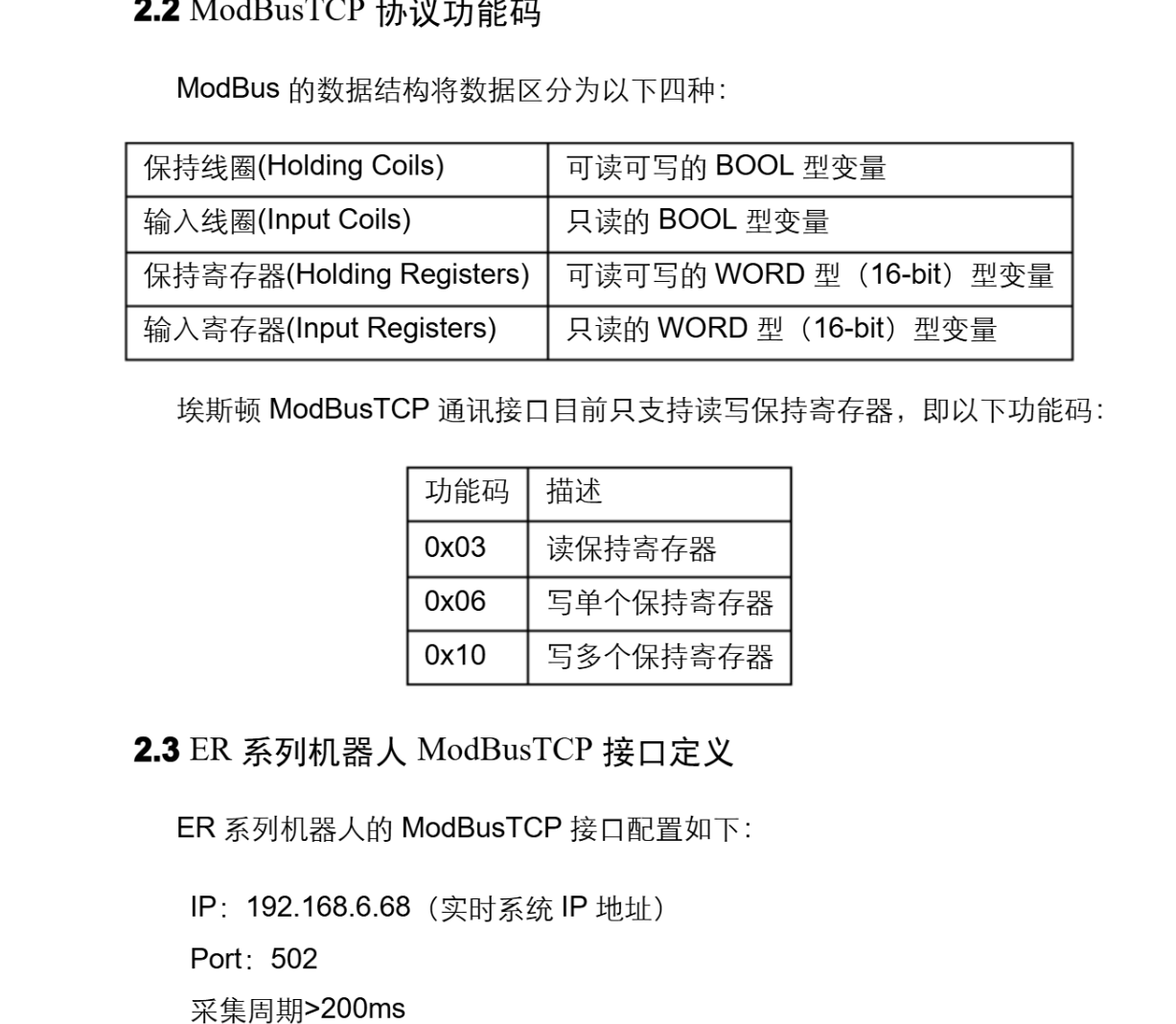
首先打开机器人通讯手册。查询机器人支持的功能码及默认IP和端口号
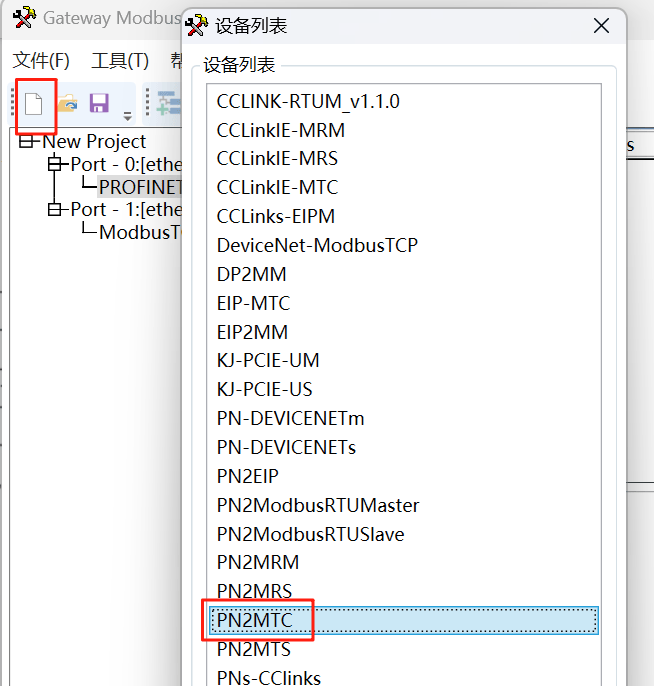
打开网关配置软件“Gateway Configuration Studio”新建项目“PN2MTC”
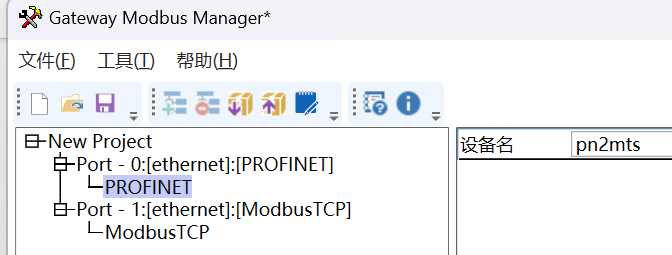
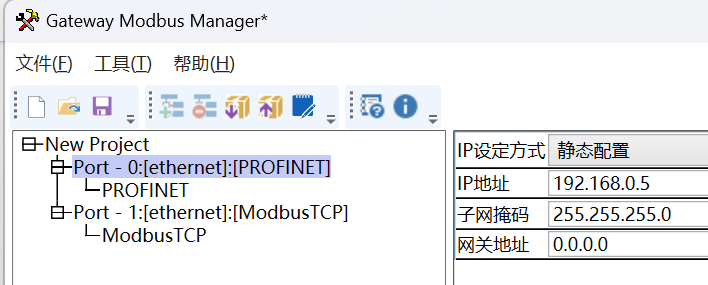
设置网关在Profinet一侧的设备名称与IP地址,与PLC一侧组态配置保持一致。
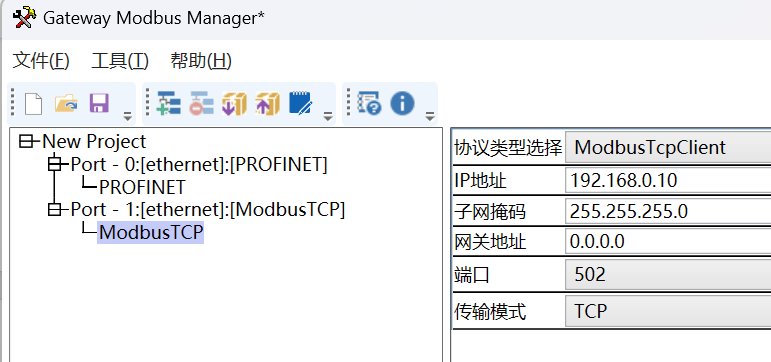
设置网关作为ModbusTCP客户端的IP地址,与机器人保持同一网段。
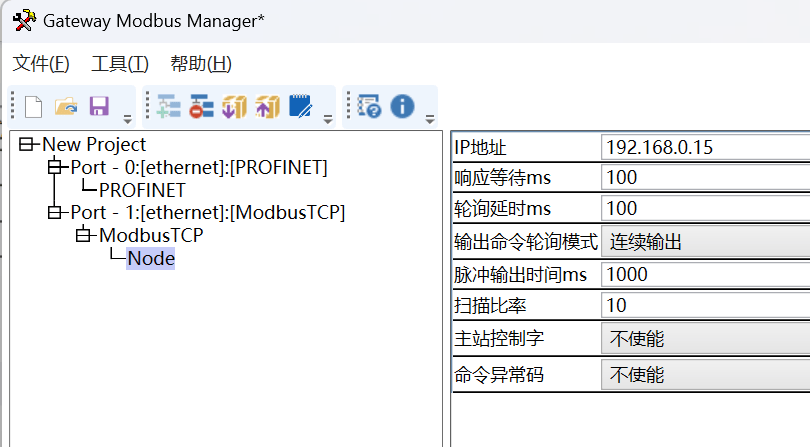
添加Node并填写机器人IP地址,并设置读写时间参数。
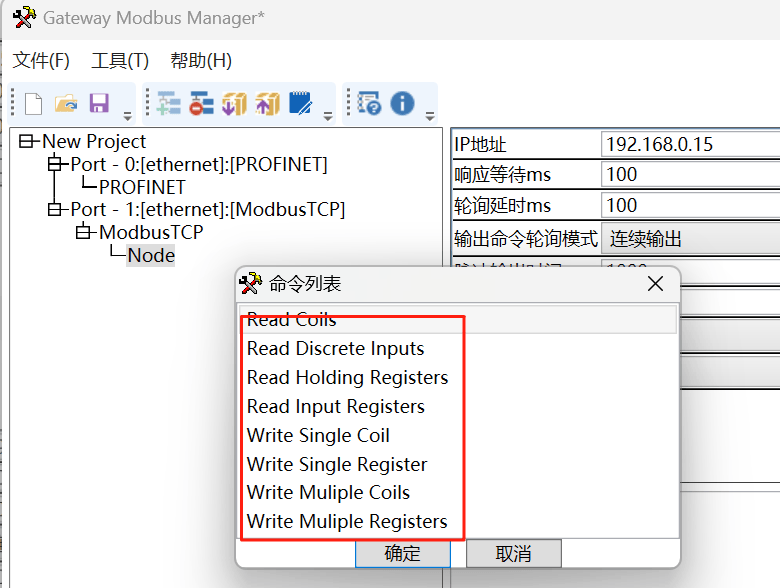
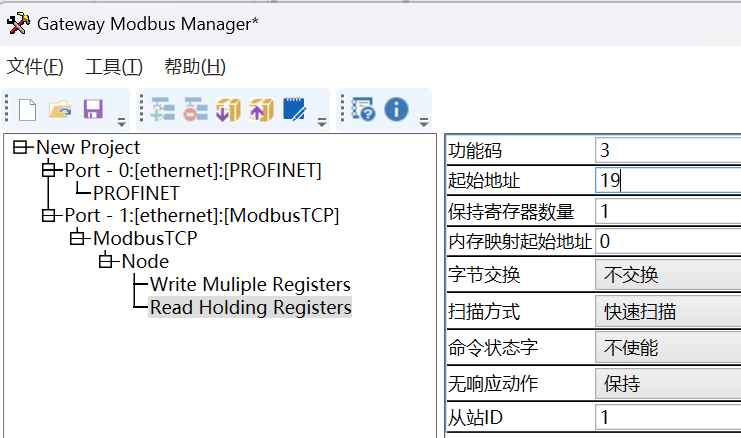
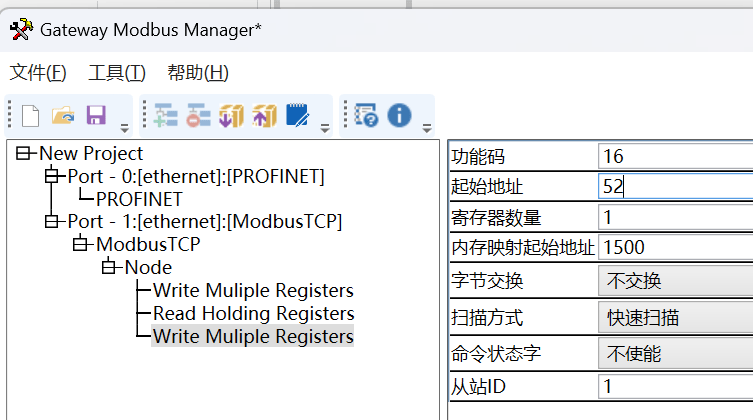
选择需要用到的功能码用于对机器人进行读写。
根据需要填写对应的寄存器地址与数量
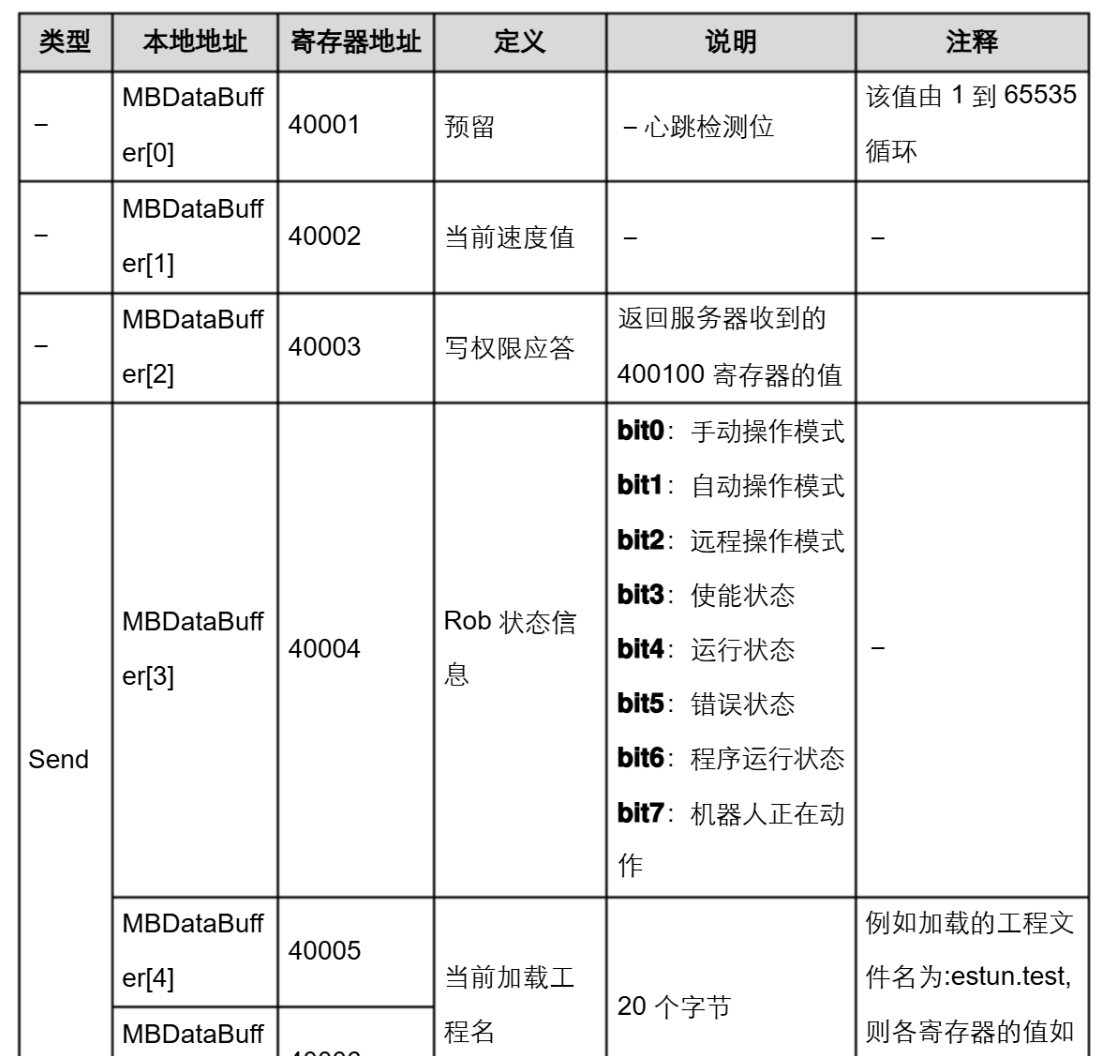
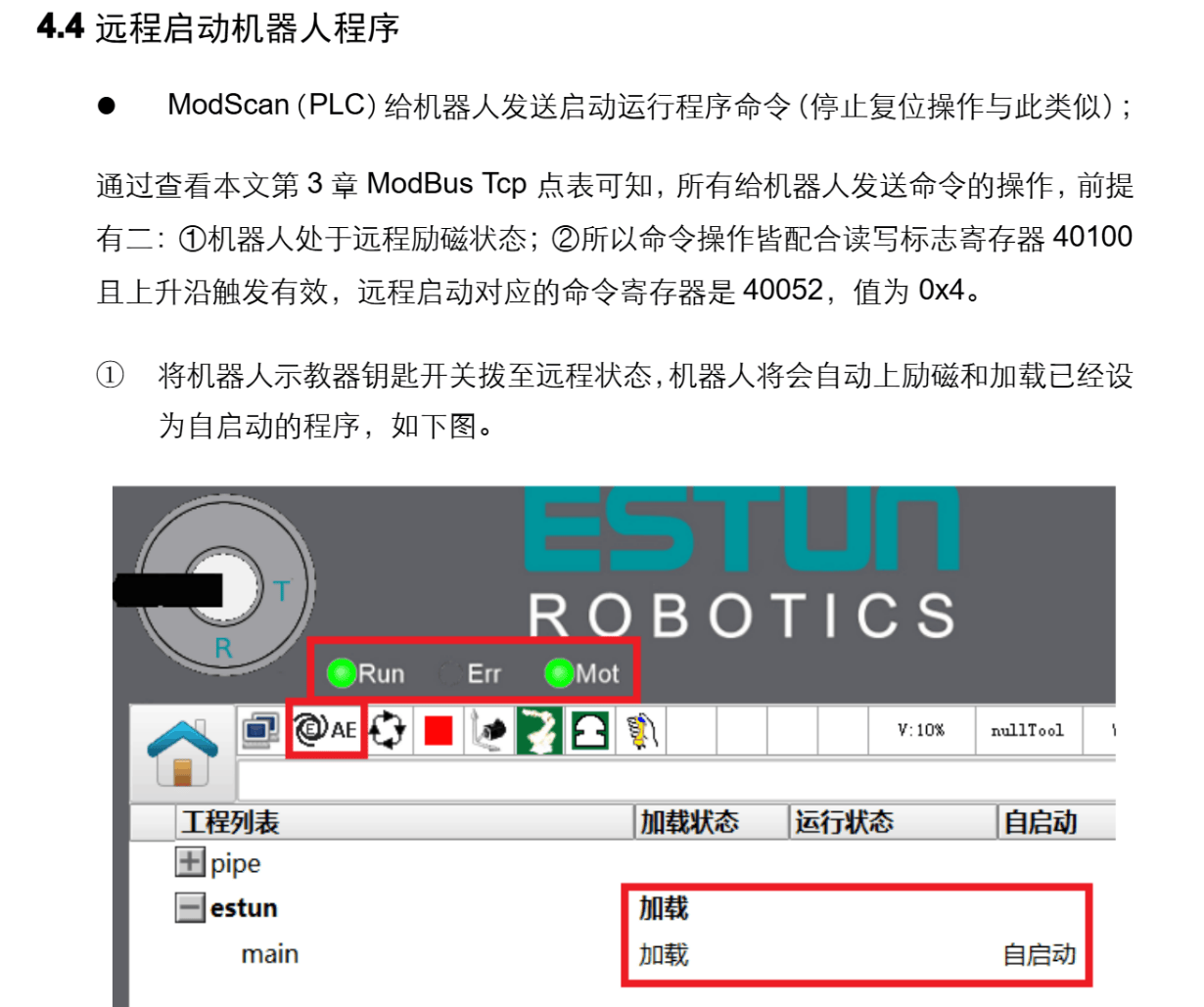
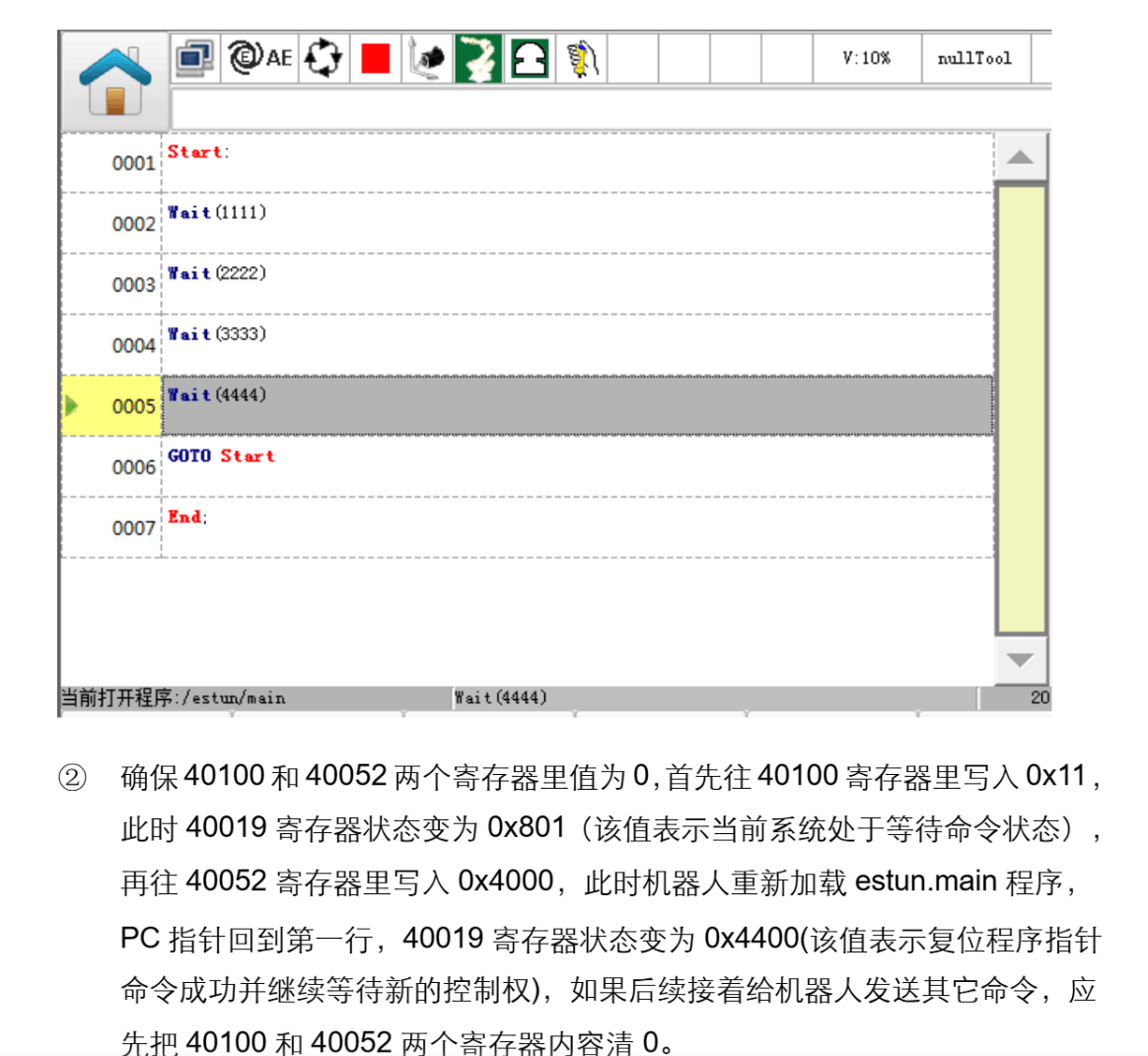
比如图中启动机器人要给寄存器40100写值
添加写寄存器功能码并写入地址100
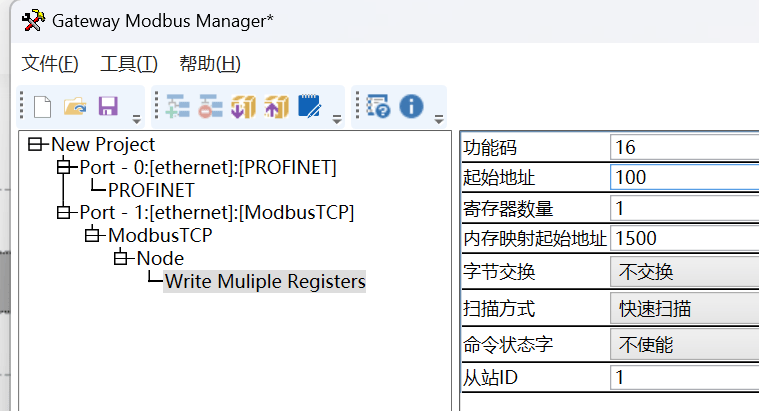
默认内存映射地址对应PLC的Q地址分配的起始地址。
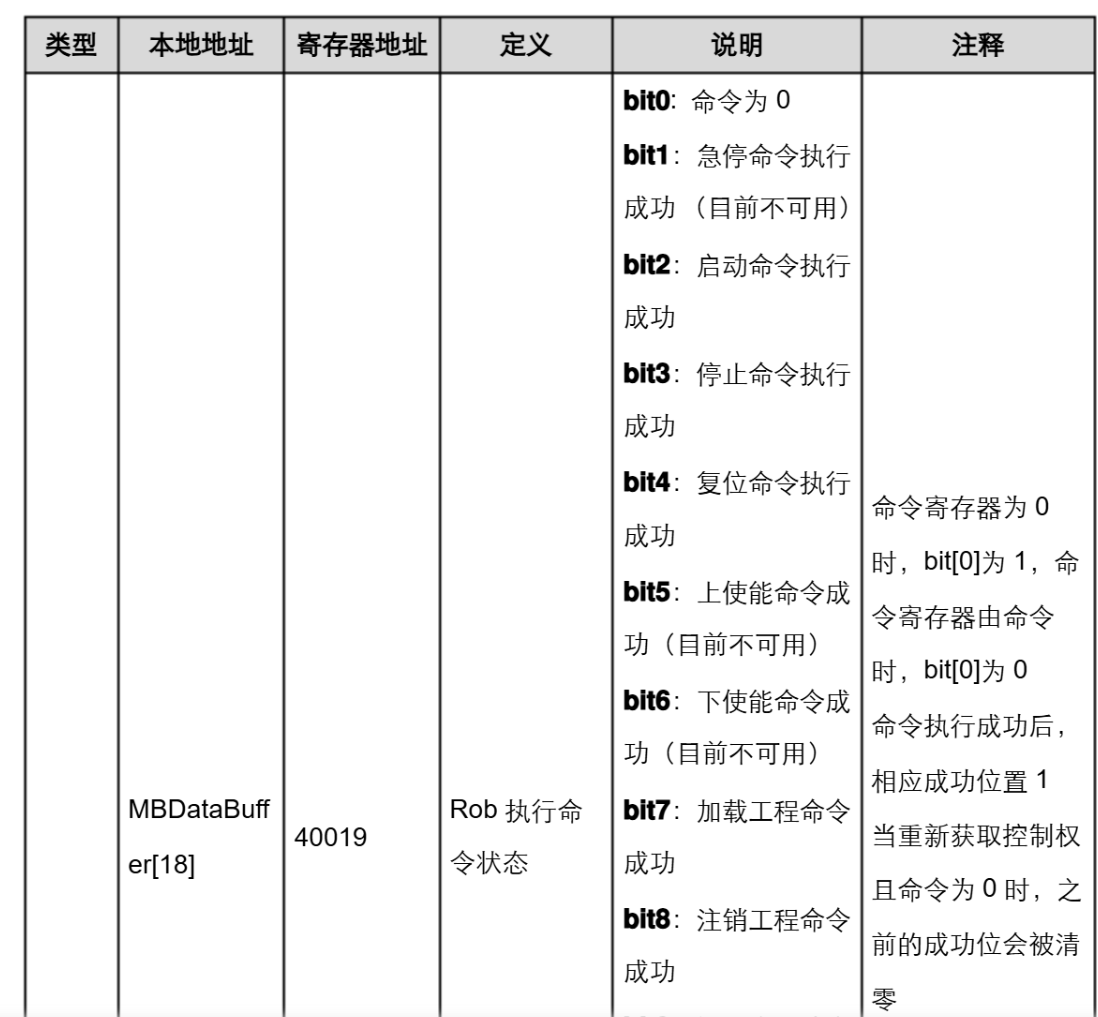
再读取40019数值和读取40052
下载配置到网关即可。
PLC配置
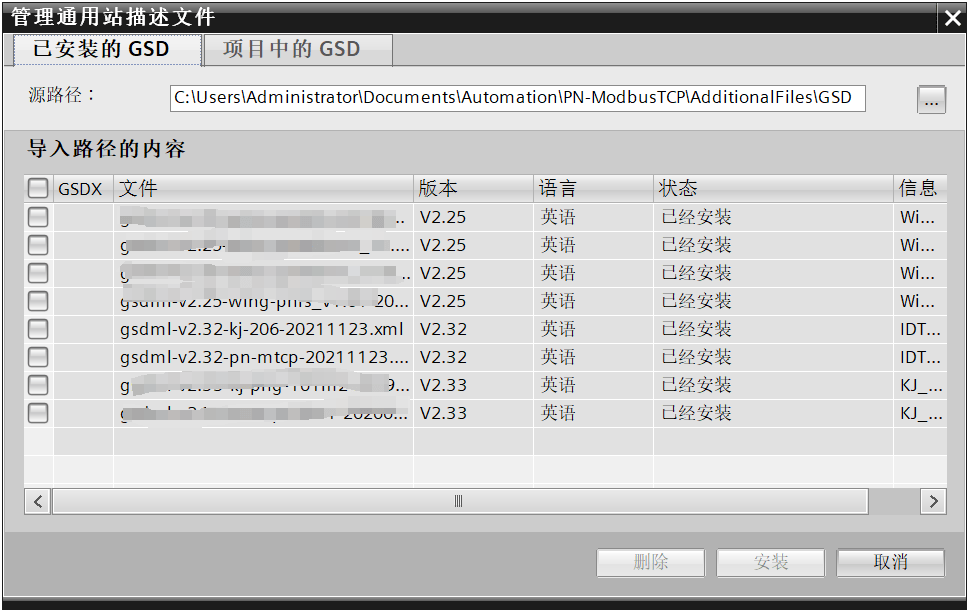
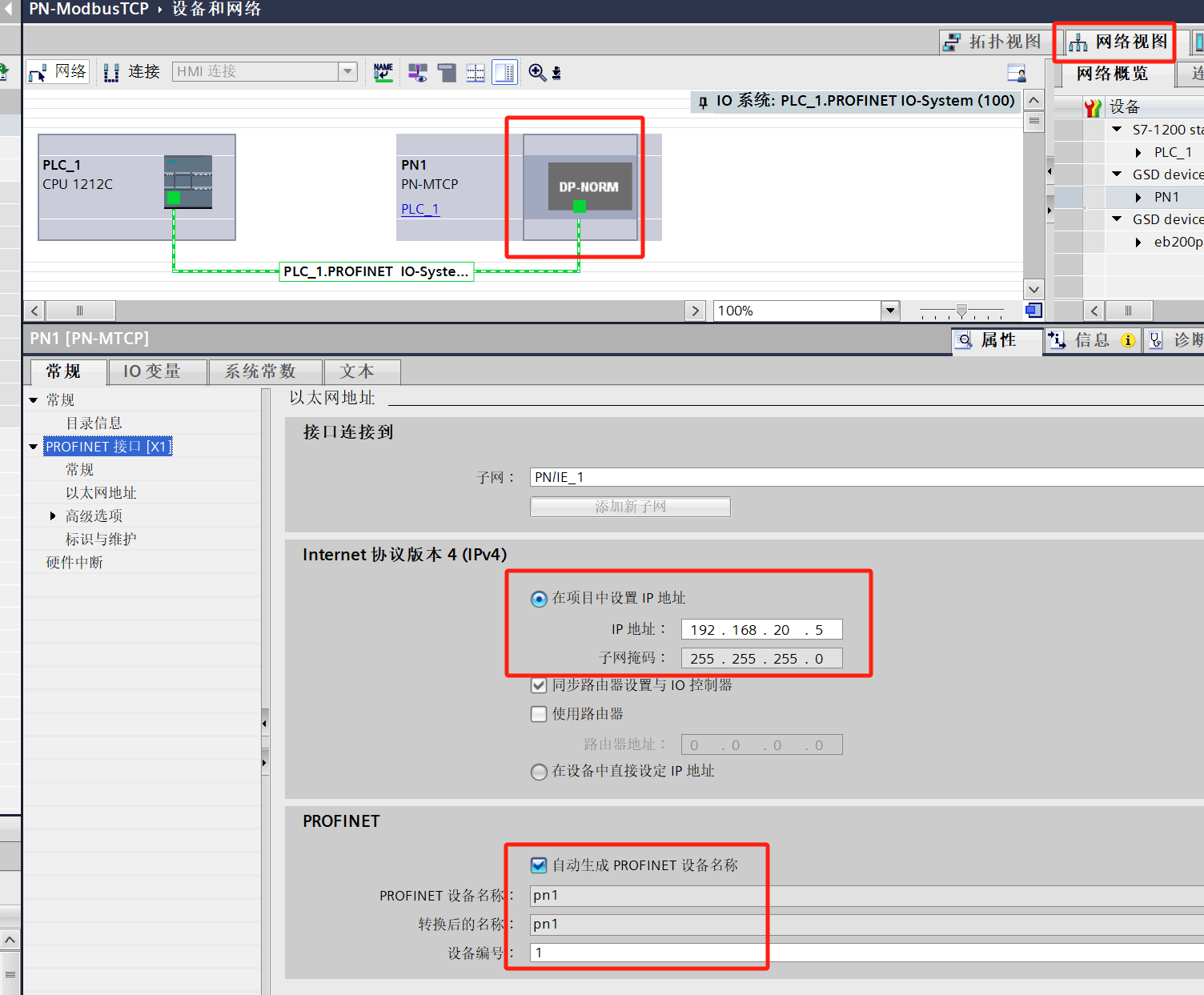
打开西门子PLC组态软件博图设置网关Profinet一侧的参数配置,首先导入网关GSD文件并设置PLC的IP地址
在网络视图中点击模块,设置网关的IP地址和设备名称
添加网关用到的数据输入输出长度
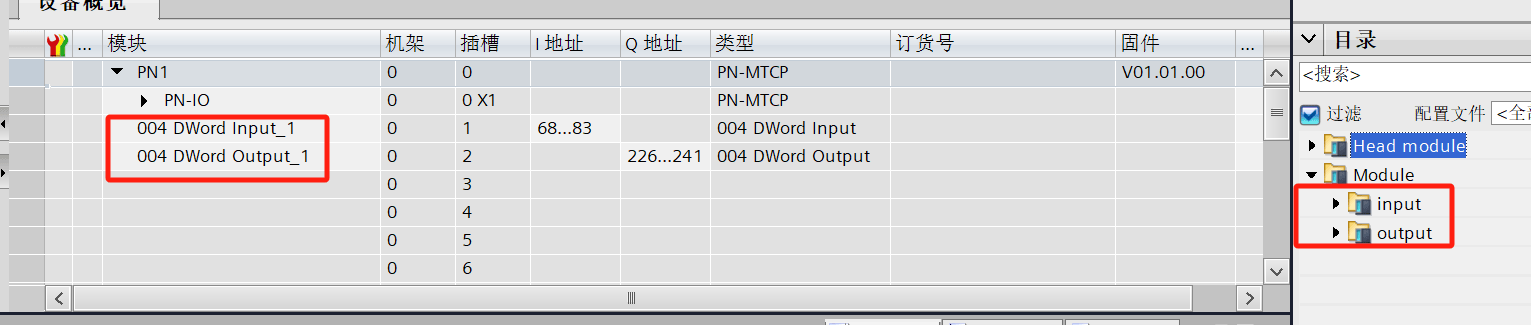
设置好分配的IQ地址,确认无误后下载到PLC
到此网关通讯配置全部完成,所有设备全部上电即可正常工作。