《基于电阻抗断层成像(EIT)的触觉传感器:物理模拟与机器学习的创新结合》论文解读

目录
I. 引言
为什么需要柔性触觉传感器?
EIT 技术:柔性传感器的 “潜力股”
现有技术的瓶颈
本研究的创新点
II. 方法
A. 传感器原型:做一只 “电子鞋垫”
原型设计
制作过程(图 1)
硬件设备
B. 正向问题:用电脑模拟 “压力如何影响电压”
虚拟模型的原理(图 2)
模拟工具与细节
C. 参数估计:让虚拟模型更像 “真实鞋垫”
优化什么参数?
怎么优化?
D. 反向问题:从 “电压变化” 猜 “压力位置”
1. 传统方法:用公式硬算
2. 新方法:让神经网络 “学” 会猜(图 3)
神经网络的结构(图 3)
训练数据怎么来?
怎么训练?
E. 模拟评估:用虚拟数据测试哪种方法更准
测试数据
评分标准
统计方法
F. 原型评估:用真实鞋垫测试
单点触摸定位测试(图 4)
两点触摸测试
III. 结果
A. 模拟测试结果:神经网络碾压传统方法
基础测试集(高斯压力点)
非高斯测试集(正方形 / 圆形压力点)
B. 原型测试结果:神经网络实战依然最强
单点触摸定位
两点触摸测试(图 11)
IV. 讨论
为什么神经网络更准?
训练数据越多样,效果越好
未来可以改进的地方
V. 结论
这篇文章讲了一个很酷的技术:用 “电阻抗断层成像(EIT)” 原理做一款能像皮肤一样感知压力的传感器,还结合了物理模拟和机器学习让它更实用。研究团队做了一个鞋垫形状的柔性传感器原型,通过电脑模拟构建虚拟模型,再用神经网络 “训练” 模型学会判断压力位置。结果显示,这个方法比传统技术更准 —— 模拟测试中,神经网络的误差只有 0.8 S/m;实际测试时,定位压力的平均误差仅 5.74 毫米。这说明用电脑生成的 “虚拟数据” 训练机器学习模型,能有效解决 EIT 触觉传感器的核心难题,让它在假肢、可穿戴设备等领域更有实用价值。
I. 引言
为什么需要柔性触觉传感器?
我们的皮肤能感知压力、温度和疼痛,这种能力对日常活动至关重要。科学家想给机器人、假肢装上 “人造皮肤”,让它们也能像人一样感知触碰。但传统的触觉传感器有个大问题:里面的导线、电路都是硬的,很难贴在弯曲或拉伸的表面上(比如假肢的关节、鞋垫的弧度)。
比如,给机器人做一只 “手”,如果传感器太硬,就握不住柔软的东西;给残障人士做假肢,硬传感器可能磨伤皮肤。所以,柔性、可拉伸的触觉传感器成了研究热点。
EIT 技术:柔性传感器的 “潜力股”
近年来,“电阻抗断层成像(EIT)” 技术被发现特别适合做柔性传感器。它的原理很巧妙:传感器中间是一块导电材料(比如特殊的柔性墨水),边缘装几个电极。当材料某处受到压力,那里的导电性会变化;通过电极通电流、测电压,就能反推 “哪里被压了”。
打个比方,这就像用手捏一块橡皮泥 —— 捏的地方形状变了,我们能通过表面的触感猜出手捏的位置;EIT 则是通过 “电流的触感”(电压变化)猜压力的位置。
EIT 的优势很明显:电极都在边缘,中间没有硬结构,所以传感器能做得很软、可拉伸,贴在任何形状的表面上。
现有技术的瓶颈
但 EIT 传感器有个难题:从 “电压变化” 反推 “压力位置” 的过程(叫 “ inverse problem”)特别复杂。因为导电性和压力的关系不是简单的 “一一对应”,微小的测量误差可能导致结果差很远。传统方法用公式计算,不仅慢,还容易出错。
另外,之前的 EIT 传感器大多是正方形、圆形这种简单形状,电极也被简化成 “点”,和实际应用中复杂的形状(比如鞋垫、机器人手指)差距很大。
本研究的创新点
研究团队针对这些问题,做了三个突破:
- 非标准形状:传感器做成鞋垫形状(不是简单的方形 / 圆形),更贴近实际应用;
- 完全柔性:整个传感器能拉伸,电极不固定在硬架子上;
- 机器学习 + 物理模拟:用电脑模拟生成大量 “虚拟数据”,训练神经网络解决 “反推压力位置” 的难题,比传统公式更准。
II. 方法
A. 传感器原型:做一只 “电子鞋垫”
研究团队的目标是做一个能感知脚底压力的鞋垫传感器,具体步骤如下:
原型设计
和传统鞋垫传感器(通常是三层结构,中间夹导线)不同,这个 EIT 鞋垫是单层结构:中间是能导电的压阻材料(受压后导电性会变),边缘有 16 个电极,负责通电流和测电压。
为什么用鞋垫形状?因为步态分析、糖尿病足监测等场景都需要鞋垫能感知脚底压力,而传统鞋垫传感器要么太硬,要么精度不够。
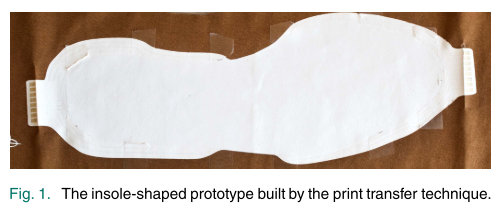
制作过程(图 1)
用一种叫 “印刷转移技术” 的方法,有点像我们往衣服上印图案:
- 先在一张 “牺牲载体”(用完就扔的临时基底)上,用丝网印刷技术一层层刷上不同墨水:
- 导电墨水(银基):做电极和连接导线;
- 压阻墨水(碳基):做鞋垫形状的 “敏感区”(受压后导电性变化明显);
- 绝缘墨水:保护内部结构;
- 热塑性胶水:方便后面粘到布上。
- 用热压机把这些墨水层转移到棉布上(180℃、15 秒、4 bar 压力),胶水受热融化,牢牢粘住;
- 撕掉 “牺牲载体”,再高温固化(150℃、5 分钟),让墨水更稳定。
最终的成品是一块能弯曲、拉伸的布质鞋垫,中间黑色的是敏感区,边缘灰色的是 16 个电极(图 1 就是这个原型的照片)。
硬件设备
给鞋垫 “搭电路” 需要这些工具:
- 电流泵:往电极里通 0.25mA 的稳定直流电流;
- 多路转换器:切换电流通入的电极(比如先给电极 1 和 2 通电,再给 2 和 3 通电);
- 数据采集卡:测量电极间的电压变化。
他们用了 “相邻驱动模式”:电流在相邻的两个电极间通入,同时测其他相邻电极间的电压差。这样能全面捕捉传感器内部的导电性变化。
B. 正向问题:用电脑模拟 “压力如何影响电压”
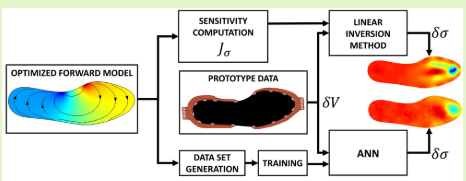
要让传感器好用,得先搞清楚 “如果某处受压,电极的电压会怎么变”—— 这就是 “正向问题”。研究团队用电脑建了个虚拟模型来模拟这个过程。
虚拟模型的原理(图 2)
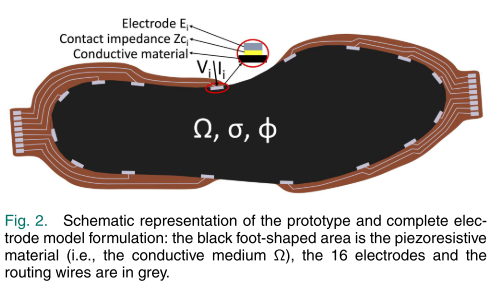
图 2 是这个虚拟模型的示意图:黑色区域是鞋垫形状的导电材料,灰色是 16 个电极。模型要算的是:当材料里某点的导电性变化(比如被压了),边缘电极的电压会怎么变。
为什么要做虚拟模型?因为直接用物理原型测试太麻烦 —— 每次改变压力位置、大小,都要重新测量,效率低。用电脑模拟可以快速生成大量数据。
模拟工具与细节
用 COMSOL Multiphysics 这款物理模拟软件,它能精准计算电流、电压在复杂形状里的分布。模型里考虑了两个关键细节:
- 电极不是 “点”,而是有实际面积的 “面”(更贴近真实情况);
- 电极和导电材料之间有 “接触阻抗”(就像电极和材料没完全贴紧,有微小电阻)。
通过模拟,只要输入 “哪里受压、压力多大”,就能算出 “每个电极的电压是多少”,为后面的机器学习提供数据。
C. 参数估计:让虚拟模型更像 “真实鞋垫”
虚拟模型再复杂,也可能和真实原型有差距(比如材料实际导电性和假设的不一样)。为了缩小差距,研究团队做了 “参数优化”:
优化什么参数?
- 背景电导率:鞋垫没受压时的基础导电性(就像没捏的橡皮泥,本身有一定软硬度);
- 电极接触阻抗:电极和鞋垫材料之间的微小电阻(影响电流传递)。
怎么优化?
- 让真实鞋垫不受压力,测 100 组电极电压数据(这是 “真实值”);
- 用虚拟模型猜这些电压(基于初始参数),算出和真实值的差距;
- 一点点调整参数,直到虚拟模型算出的电压和真实值几乎一样(用高斯 - 牛顿算法自动调整)。
最终得到:背景电导率是 247.56 S/m,平均接触阻抗约 2×10⁻⁶ Ω・m²。这一步让虚拟模型更 “真实”,后面生成的数据也更可靠。
D. 反向问题:从 “电压变化” 猜 “压力位置”
这是整个研究的核心:已知电极的电压变化,怎么反推 “哪里被压了”?研究团队试了两种方法。
1. 传统方法:用公式硬算
传统上,科学家用 “灵敏度矩阵”(可以理解为一组提前算好的系数)来解这个问题。就像已知 “y = ax + b”,知道 y 求 x,需要先知道 a 和 b。但这个方法有个大问题:EIT 的 “方程” 特别复杂,算出来的结果误差大,尤其是压力复杂时。
他们测试了四种传统方法(L2 正则化、NOSER 算法等),本质都是用不同的数学技巧减少误差,但效果有限。
2. 新方法:让神经网络 “学” 会猜(图 3)
神经网络是一种能 “学习” 的数学模型,就像教学生做选择题:给大量 “电压变化→压力位置” 的例题,让它自己总结规律,最后能独立解题。
神经网络的结构(图 3)
图 3 是这个网络的示意图:
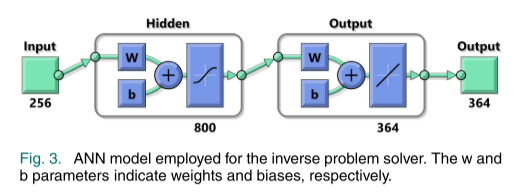
- 输入:256 个电压变化值(因为有 16 个电极,相邻驱动模式下能测 256 组电压差);
- 隐藏层:800 个 “神经元”(相当于中间处理器,负责找规律);
- 输出:364 个点的导电性变化(把鞋垫分成 364 个小格子,每个格子的导电性变化代表是否受压)。
训练数据怎么来?
用前面优化好的虚拟模型生成 10100 组 “例题”:
- 每个例题模拟 1-5 个 “压力点”(用高斯分布模拟,类似手指按压的圆形区域);
- 每个压力点的位置(比如脚趾、脚跟)、大小(10-50 毫米)、强度(导电性变化 - 30 到 0 S/m)都是随机的;
- 用虚拟模型算出每个例题对应的电压变化,再加点小噪声(模拟实际测量误差)。
怎么训练?
把 10100 组数据分成:70% 用来训练(教网络做题),15% 用来验证(看网络有没有学偏),15% 用来测试(最终评分)。用 “反向传播算法” 让网络不断调整参数,直到输出的压力位置和实际位置越来越近。
训练花了约 11 小时(在 AMD EPYC 处理器上),跑了 26000 个 “回合”(epoch)才收敛 —— 可以理解为学生做了 26000 套题,终于掌握了规律。
E. 模拟评估:用虚拟数据测试哪种方法更准
有了两种方法,需要用虚拟数据先 “考试”,看谁的成绩好。
测试数据
- 基础测试集:1515 组数据,和训练数据类似(高斯分布的压力点);
- 非高斯测试集:200 组数据,压力点是正方形或圆形(和训练数据的 “题型” 不同,看网络是否能举一反三)。
评分标准
用 “均方根误差(RMSE)” 衡量:算出方法预测的压力位置(或导电性变化)和真实情况的平均差距,差距越小越好。
统计方法
因为误差数据不一定符合正态分布,用了非参数检验(克鲁斯卡尔 - 沃利斯检验),确保结论可靠。
F. 原型评估:用真实鞋垫测试
虚拟测试通过后,还要用前面做的物理原型实际测试,看在真实场景中是否好用。
单点触摸定位测试(图 4)
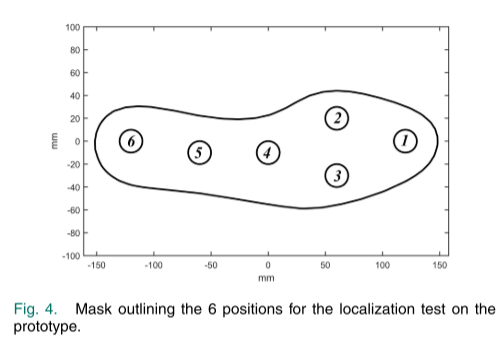
图 4 是测试位置的示意图:在鞋垫上选了 6 个点(比如脚趾前端、脚跟中心、足弓等),每个点用手指轻压,记录电压变化。
怎么判断定位准不准?
- 用不同方法根据电压变化,画出 “哪里导电性变化最大”(也就是压力可能在的地方);
- 把变化最明显的区域(ROI)圈出来,算这个区域的中心(质心);
- 用质心和实际按压点的距离作为 “位置误差(PE)”。
每个位置测 5 次,总共 30 组数据,确保结果稳定。
两点触摸测试
同时按压两个点,看传感器能不能区分开(比如同时按脚趾和脚跟,能不能看出是两个地方受压)。
III. 结果
A. 模拟测试结果:神经网络碾压传统方法
基础测试集(高斯压力点)
直观对比(图 5):图 5 左边是复杂压力模式(多个点叠加),右边是两个分离的压力点(脚趾和脚跟)。可以看到:
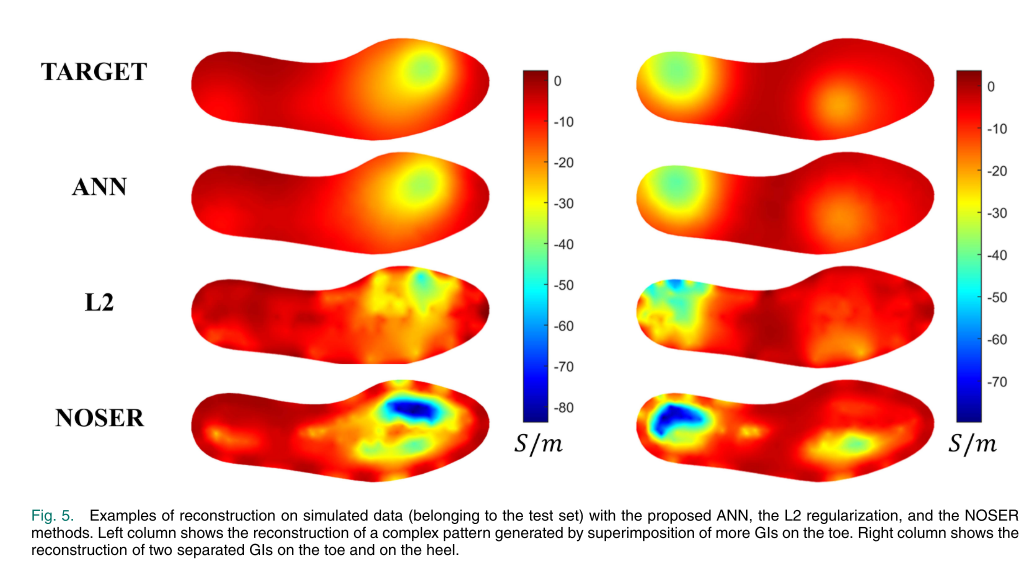
神经网络(ANN)重建的 “压力区域” 和真实情况(TARGET)几乎一样;
L2 正则化方法的结果很模糊;
NOSER 方法能大概找到位置,但区域形状不准。
定量对比(图 6):图 6 是不同方法的误差箱线图,箱体越矮、中线越低,说明误差越小。结果显示:
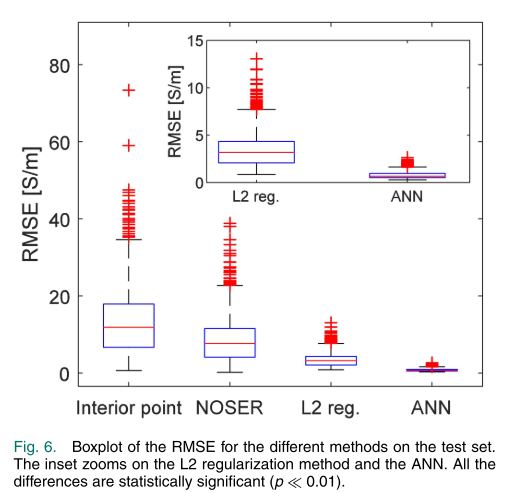
神经网络的平均误差(RMSE)只有 0.80 S/m;
L2 正则化是 3.44 S/m(约 4 倍);
NOSER 是 8.41 S/m(约 10 倍);
内点法和非正最小二乘法更差(13-34 S/m)
所有方法的误差差异都有统计学意义(p<0.01),说明神经网络的优势不是偶然。
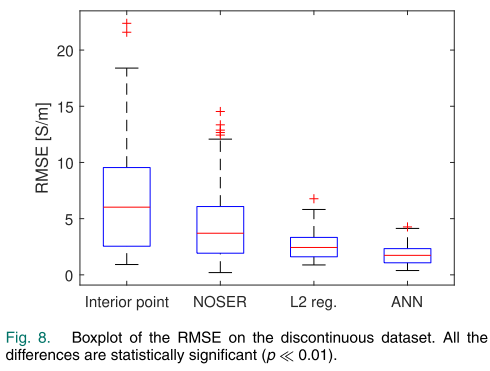
非高斯测试集(正方形 / 圆形压力点)
直观对比(图 7):图 7 是正方形和圆形压力点的重建结果。神经网络虽然让边缘有点模糊(因为训练数据多是高斯分布),但整体形状和位置都准;传统方法则偏差很大。
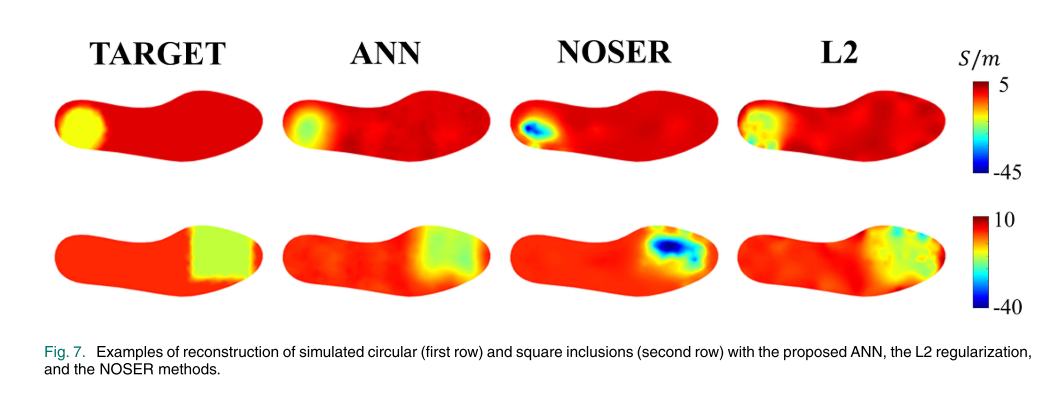
定量对比(图 8):神经网络的平均误差 1.80 S/m,依然远低于其他方法(L2 是 5.23 S/m,NOSER 是 9.17 S/m)。这说明神经网络能 “举一反三”,即使遇到没学过的压力形状,也比传统方法准。
B. 原型测试结果:神经网络实战依然最强
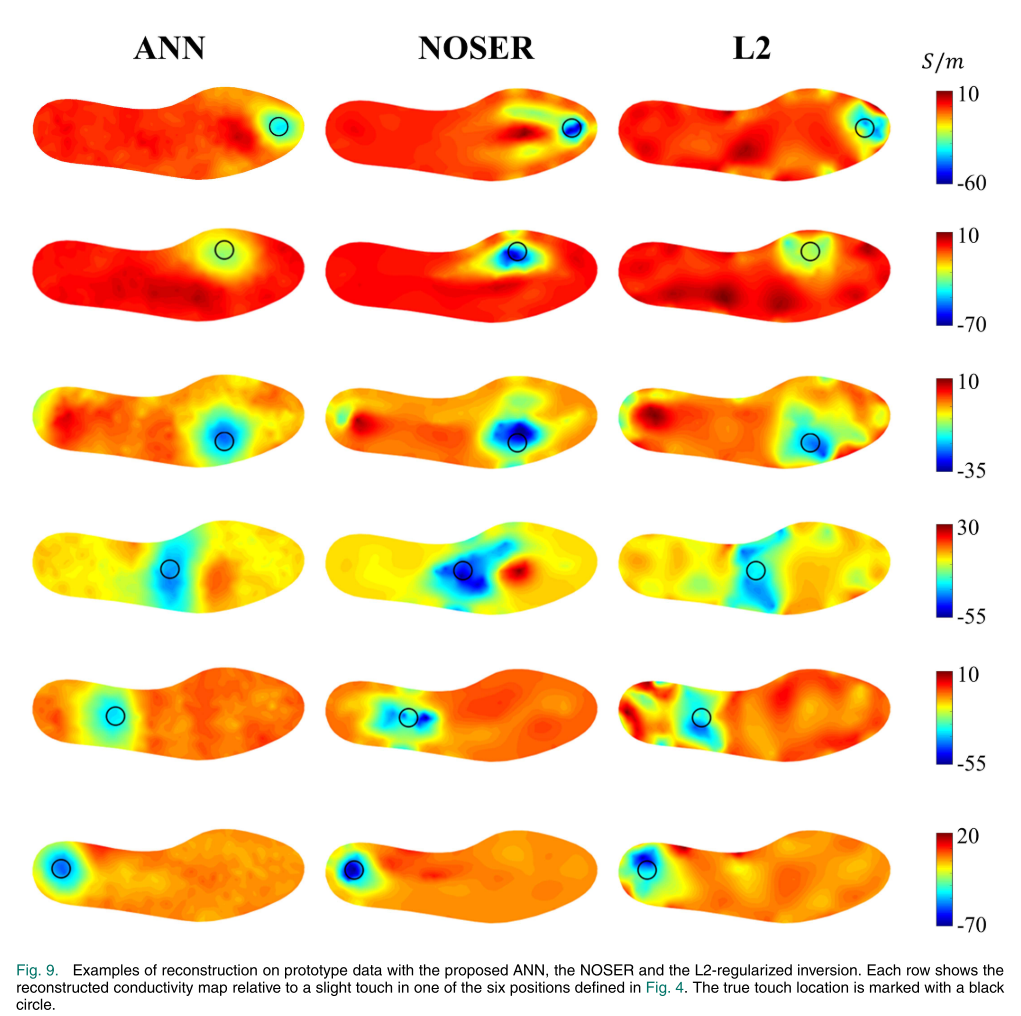
单点触摸定位
直观对比(图 9):图 9 是 6 个测试位置的重建结果,每个位置的真实按压点用黑圈标出来。神经网络重建的 “高变化区” 基本都围着黑圈,而 L2 和 NOSER 方法的区域要么偏得远,要么有很多 “假阳性”(不该有变化的地方出现变化)。
定量对比(图 10、表 1):
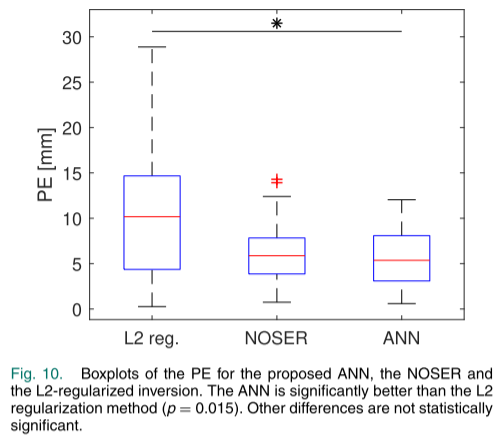
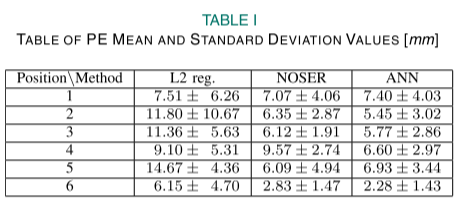
表 1 详细列出了每个位置的误差:在电极密集的位置(比如位置 6,脚趾边缘),所有方法误差都小;但在电极少的位置(比如位置 4、5,足弓附近),神经网络的优势更明显。
神经网络的平均位置误差 5.74 毫米;
L2 正则化 10.10 毫米(几乎差一倍);
NOSER6.34 毫米(和神经网络接近,但看重建图会发现它的 “压力区域” 幅度不准)。
两点触摸测试(图 11)
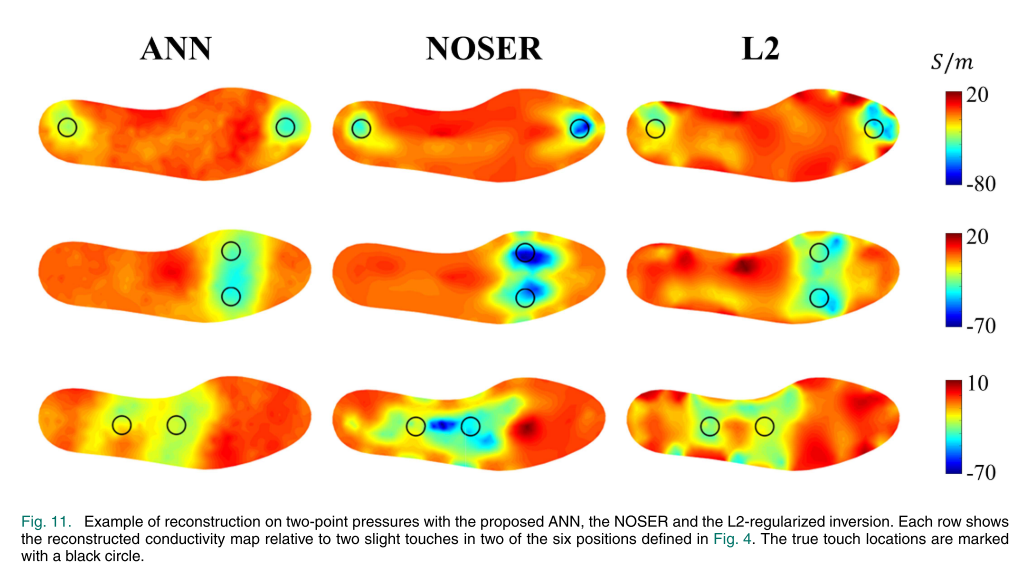
当两个点离得远(比如脚趾和脚跟),三种方法都能区分;
当两个点离得近(比如相邻的位置 2 和 3),神经网络的两个 “压力区域” 重叠更少,区分度更高。
IV. 讨论
为什么神经网络更准?
传统方法用公式硬算,对 “模型和真实的差距”(比如传感器实际形状和虚拟模型有点不一样)很敏感,容易出错。而神经网络在训练时见过大量 “虚拟数据”,其中包含各种可能的误差模式,相当于 “见多识广”,所以对实际误差的容忍度更高。
比如,真实传感器的电极位置可能和模型有点偏差,传统方法会因为这个偏差算错,而神经网络因为训练时见过类似的 “不完美数据”,反而能忽略这个偏差。
训练数据越多样,效果越好
非高斯测试集的结果说明:如果训练数据里不仅有高斯压力点,还加入正方形、圆形等形状,神经网络的泛化能力会更强。就像学生做题,见过的题型越多,考试时越不容易慌。
未来可以改进的地方
- 模型更真实:现在的虚拟模型没考虑 “传感器被拉伸时形状会变”,未来可以加入 “多物理场模拟”(同时算力学拉伸和电学变化),让数据更贴近实际;
- 网络更深:现在用的是单隐藏层神经网络,试试更深的网络(比如深度学习)可能更准;
- 感知更多信息:目前只能测压力位置,未来可以研究 “导电性变化和压力大小的关系”,让传感器不仅知道 “哪里被压”,还知道 “压了多重”。
V. 结论
研究团队用 “物理模拟 + 机器学习” 的方法,成功做出了一款鞋垫形状的 EIT 触觉传感器,解决了传统技术的两个大问题:
- 非标准形状(鞋垫)也能精准感知压力;
- 用神经网络替代传统公式,大幅提高了定位精度。
这个技术的价值在于提供了一套 “通用流程”:
- 设计传感器形状(比如鞋垫、机器人手指);
- 用物理软件建虚拟模型,优化参数;
- 生成虚拟数据训练神经网络;
- 做出物理原型,用训练好的模型实现精准感知。
未来,这种传感器可以用在智能鞋垫(监测步态)、假肢(让使用者感知触碰)、机器人抓手(抓东西时不捏碎)等领域,让机器更 “懂” 触觉。