LPVIMO-SAM:基于多传感器紧耦合的高精度鲁棒SLAM系统
编辑:陈萍萍的公主@一点人工一点智能
LPVIMO-SAM:基于多传感器紧耦合的高精度鲁棒SLAM系统论文提出了一种创新的多传感器紧耦合SLAM框架,通过融合激光雷达、偏振视觉、惯性测量单元、磁力计和光流等多种传感器数据,显著提升了在退化环境(如低纹理、特征稀缺或LiDAR性能下降场景)中的定位与建图性能。![]() https://mp.weixin.qq.com/s/tc1oLsXY3t8g1KDpC3roCw论文提出了一种创新的多传感器紧耦合SLAM框架,通过融合激光雷达、偏振视觉、惯性测量单元、磁力计和光流等多种传感器数据,显著提升了在退化环境(如低纹理、特征稀缺或LiDAR性能下降场景)中的定位与建图性能。全文将从摘要与引言、相关工作、方法论细节、实验验证以及结论与展望五个方面展开系统分析,重点剖析其技术创新的核心思想、多传感器融合机制的数学表达、因子图优化框架的设计理念,以及在复杂环境中的性能表现,为读者提供一个全面而深入的技术视角。
https://mp.weixin.qq.com/s/tc1oLsXY3t8g1KDpC3roCw论文提出了一种创新的多传感器紧耦合SLAM框架,通过融合激光雷达、偏振视觉、惯性测量单元、磁力计和光流等多种传感器数据,显著提升了在退化环境(如低纹理、特征稀缺或LiDAR性能下降场景)中的定位与建图性能。全文将从摘要与引言、相关工作、方法论细节、实验验证以及结论与展望五个方面展开系统分析,重点剖析其技术创新的核心思想、多传感器融合机制的数学表达、因子图优化框架的设计理念,以及在复杂环境中的性能表现,为读者提供一个全面而深入的技术视角。
01 简介
论文开篇即以明确的科研问题为导向,直指当前SLAM领域在复杂环境中面临的三大挑战:LiDAR在非结构化场景中的性能退化、视觉系统在低纹理环境下的特征提取困难,以及单传感器系统固有的局限性。尽管现有LiDAR-视觉-惯性组合系统(如LVI-SAM、R2LIVE)通过多传感器融合已取得显著进展,但在Z轴漂移抑制、航向角误差累积和极端环境鲁棒性方面仍存在明显不足。
LPVIMO-SAM的核心创新体现在三个层面:
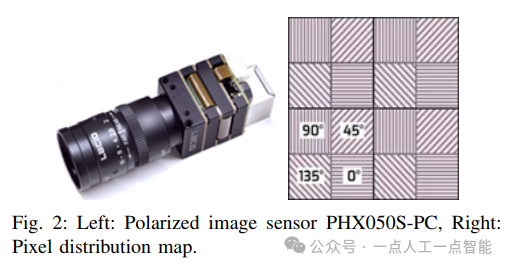
首先,创造性地引入偏振视觉传感,通过度偏振(DOP)和角偏振(AOP)图像增强传统灰度图像的特征提取能力,解决了低纹理环境下视觉特征稀缺的根本问题。如图6所示,在苛刻条件(corner selection quality level 0.9-0.95)下,传统VIO系统已无法提取足够特征,而偏振增强的RGB图像仍能保持稳定的特征点检测。
其次,系统设计了多模态传感器紧耦合架构,通过磁力计提供航向角先验因子,光流模块提供速度与高度观测因子,有效抑制了LiDAR子系统在退化环境中的误差累积。
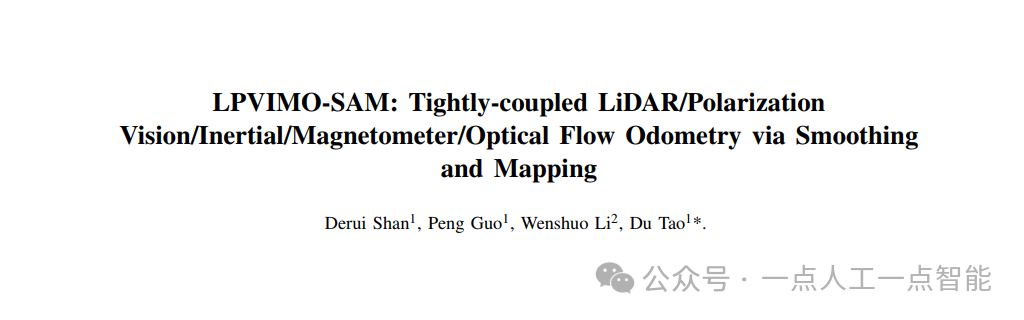
最后,论文提出了双层冗余设计的系统架构(如图1所示),使系统在任一子系统(PVIS或LIMOS)失效时仍能维持基本定位功能,显著提升了整体鲁棒性。
从技术贡献来看,论文的三大创新点形成了层次分明的解决方案:
1) 针对低纹理环境的偏振视觉增强;
2) 针对LiDAR退化的光流/磁力计辅助;
3) 基于因子图优化的紧耦合框架。
这种多层次的创新架构不仅解决了特定环境下的定位问题,更重要的是提供了一种多传感器协同工作的通用范式。作者在摘要中特别强调,在典型的256.1米测试场景中,系统实现了0.87米的RMSE精度,较基准方法LVI-SAM提升43.4%,这一数据为后续的详细实验分析埋下了伏笔。
02 相关工作综述分析
论文以清晰的逻辑脉络梳理了LiDAR-视觉-惯性SLAM和偏振集成导航系统两大领域的研究进展,通过分类比较揭示了技术演进的轨迹与现存挑战。在LiDAR-视觉-惯性SLAM方面,作者创新性地提出以耦合程度作为分类标准,将现有系统划分为松耦合与紧耦合两大范式。
松耦合系统如VIL-SLAM[10]和[11][12]中提到的方案,仅在不同子系统间交换状态估计结果,而未实现传感器数据的深度融合。这种架构虽然实现简单,但由于缺乏测量层面的约束,难以从根本上解决误差累积问题。作者引用Cheng等[13]的工作说明,即使引入关键帧和滑动窗口算法,松耦合系统的精度(相比ORB-SLAM3提升70%)仍落后于紧耦合方法。
在紧耦合系统分析中,论文构建了一条清晰的技术发展路径:从LIC-Fusion[15]基于MSCKF的早期尝试(室外轨迹误差降低62%),到里程碑式的LVI-SAM[7](RMSE降低81%),再到近年来的FAST-LIVO[16](误差减少58%)及其改进版FAST-LIVO2[17](再降50%),最终到LVIO-Fusion[18]通过光度校准实现的47.8%精度提升。
这一演进过程揭示了领域内精度竞赛背后的技术逻辑——从状态估计融合到原始测量融合,从特征级匹配到直接图像配准,从几何约束到光电联合优化。作者特别指出,尽管这些先进系统性能卓越,但在LiDAR退化、低纹理等极端场景下仍存在匹配失败和特征提取困难等根本问题,这为LPVIMO-SAM的偏振视觉创新提供了理论依据。
在偏振导航部分,论文从偏振信息源的角度切入,创造性地分为天空偏振与场景偏振两大应用方向。天空偏振导航受生物启发(如沙漠蚂蚁[19]),已形成相对成熟的技术体系,论文列举了从基础姿态参考系统[22](俯仰/横滚精度0.1°)、UKF融合系统[23](RMSE 1.7°)到因子图优化方法[24]和抗差滤波[25]的技术演进。
值得注意的是,作者团队此前在[26-29]中已对天空偏振在水下、月光等特殊环境的应用进行了探索,这些积累为当前工作奠定了坚实基础。相比之下,场景偏振的应用研究尚属新兴领域,此前主要集中于目标检测[30]和稠密重建[31],直到最近才出现与ORB-SLAM3的结合尝试[32]。论文明确指出,将场景偏振用于LiDAR-视觉-惯性融合的研究几乎空白,这一洞见直接催生了LPVIMO-SAM的核心创新。
作者指出,现有LVIS系统面临两大未解难题:LiDAR子系统在非结构化环境中的扫描匹配失败,以及视觉子系统在低纹理场景下的特征提取困境。这些痛点无法通过简单的传感器叠加或现有融合策略解决,必须寻求新的信息源和处理范式。正是基于这一分析,论文自然过渡到方法论部分,引出偏振视觉与多传感器紧耦合的创新方案。
03 方法论深度解析
LPVIMO-SAM的方法论设计体现了多传感器信息深度融合的系统级创新,其技术内核可分解为偏振视觉增强、多因子图优化框架和故障容错机制三个关键层面。图1所示的系统流程图揭示了这一紧耦合架构的精妙之处——不同于传统级联式处理流程,系统采用并行-交互式设计,其中偏振视觉-惯性系统(PVIS)与LiDAR-惯性-磁力计-光流系统(LIMOS)既能独立运作形成冗余,又通过因子图优化实现深度协同。这种架构在传感器层面实现了"分而治之",在状态估计层面则保持"全局最优",为系统的高精度和强鲁棒性奠定了结构基础。
3.1 偏振视觉增强机制
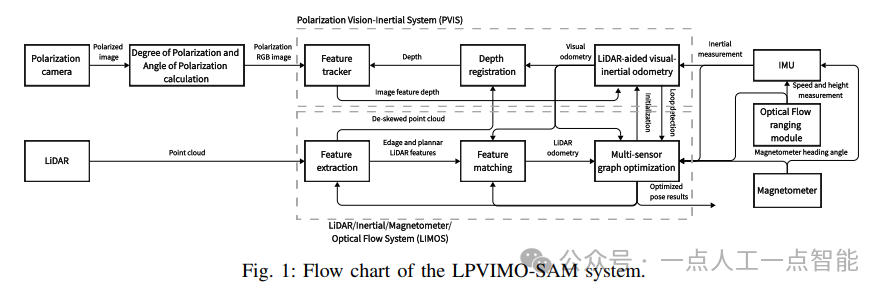
偏振视觉增强是解决低纹理环境下特征提取问题的核心技术。如图2所示,系统采用的Sony IMX250MZR偏振相机可同时捕获0°、45°、90°和135°四个方向的偏振图像,基于此通过公式(1)-(5)计算灰度图像、DOP图像和AOP图像。公式(1)通过四方向偏振强度的平均获取传统灰度信息,而公式(2)则通过斯托克斯参数计算每个像素的偏振度,其中分子项反映偏振强度的方向差异,分母实现归一化处理。
![]()

值得注意的是,论文对原始DOP值进行了非线性映射(公式3),通过的二次变换增强低偏振区域的对比度,这一处理显著提升了弱纹理区域的可用特征数量。
![]()
偏振角信息的处理同样独具匠心。公式(4)基于四方向强度计算偏振角θ,其物理意义反映了物体表面法向的方位信息;而公式(5)通过线性映射将θ∈[-π/2, π/2]转换为0-255的灰度值。最终,系统将g(灰度)、
(DOP)和
(AOP)分别赋予RGB通道,合成偏振增强的彩色图像。这种表示方法不仅保留了传统视觉信息,更融入了物体表面的偏振物理特性,使得即使在没有纹理的均匀表面,也能基于材质的光学特性提取稳定特征。如图6所示,在苛刻条件下,传统灰度图像几乎无法检测到有效特征,而偏振RGB图像仍能保持丰富的角点分布,这一对比直观证明了偏振增强的有效性。
![]()
![]()
3.2 因子图优化框架
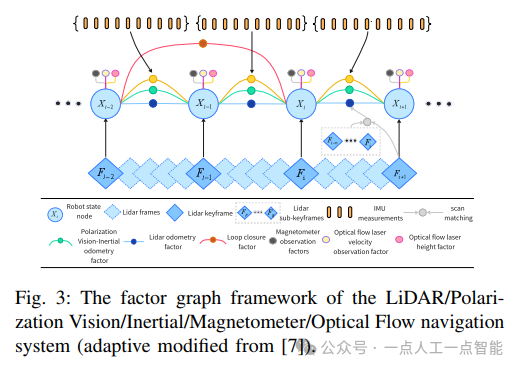
系统的状态估计核心是基于iSAM2[33]的因子图优化框架,如图3所示,其创新性体现在多种新型因子的引入与协同机制。在IMU预积分因子和LiDAR里程计因子等传统约束之外,论文针对特定问题设计了三类关键因子:
磁力计航向因子解决了LiDAR子系统在长航程中的航向漂移问题。系统通过JY-RM3100磁力计获取绝对航向,经过阈值滤波剔除地磁异常干扰后,构建航向观测因子。该因子与系统估计航向的误差函数定义在因子图中形成软约束,有效抑制了陀螺仪积分导致的航向误差累积。特别是在LiDAR退化场景(如开阔操场)中,当扫描匹配失效时,这一先验信息成为维持航向精度的关键。
光流速度与高度因子则针对Z轴漂移这一LiDAR SLAM的经典难题。光流模块提供的速度观测和高度观测形成误差函数。这些约束在因子图中锚定了垂直方向的运动估计,实验部分证明,该设计使LIOMO-SAM在Z轴误差上较LIO-SAM降低约65.7%(场景a)。值得注意的是,光流数据虽然绝对精度有限,但其相对测量稳定性极高,作为持续的低频修正源,能有效抑制惯性导航的误差发散。
系统还创新性地设计了偏振视觉-惯性里程计因子,将PVIS子系统的位姿估计以约束形式融入全局优化。这一设计使得即使在某子系统(如LiDAR)完全失效的情况下,系统仍能基于另一子系统维持基本定位功能,实现了真正的传感器冗余。
这种紧耦合优化策略确保了系统在各种环境条件下都能获得全局最优的状态估计,体现了"整体大于部分之和"的多传感器融合哲学。
04 实验与结果分析
论文的实验设计体现了严谨的科学方法论,通过五组不同特性的场景数据集(a-e)系统验证了LPVIMO-SAM的优越性能。
如表1所示,这些场景精心覆盖了曲折路径(场景a)、高动态干扰(场景b/d)、LiDAR退化(场景c/e)等多种挑战条件,总测试轨迹达1.28公里,为结论的可信度提供了坚实基础。
在基准方法选择上,作者兼顾了传统方案(LIO-SAM)、先进滤波方法(FAST-LIO2)和紧耦合优化框架(LVI-SAM,FAST-LIVO),形成了层次丰富的对比体系。
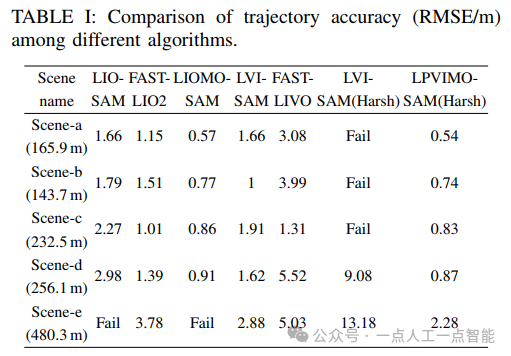
在LiDAR-惯性系统对比中,LIOMO-SAM(LPVIMO-SAM的纯LiDAR-惯性版本)展现出显著的精度优势。场景a数据显示,其1.15米的RMSE较LIO-SAM的1.66米提升30.7%,而加入磁力计和光流约束后,性能进一步提升至0.54米(提升67.5%)。这一结果验证了辅助传感器对抑制误差累积的有效性。
特别值得注意的是场景e的极端测试,在480.3米的LiDAR退化环境中,LIO-SAM完全失效,FAST-LIO2虽能运行但RMSE达3.78米,而LIOMO-SAM仍保持2.28米的精度。这一对比强有力地证明了光流/磁力计辅助在传感器退化场景中的必要性。
全系统LPVIMO-SAM的表现更为突出。在最具挑战性的场景d(256.1米,高动态+LiDAR退化)中,系统取得0.87米的RMSE,较LVI-SAM的1.54米提升43.4%,较FAST-LIVO的5.52米提升84.2%。
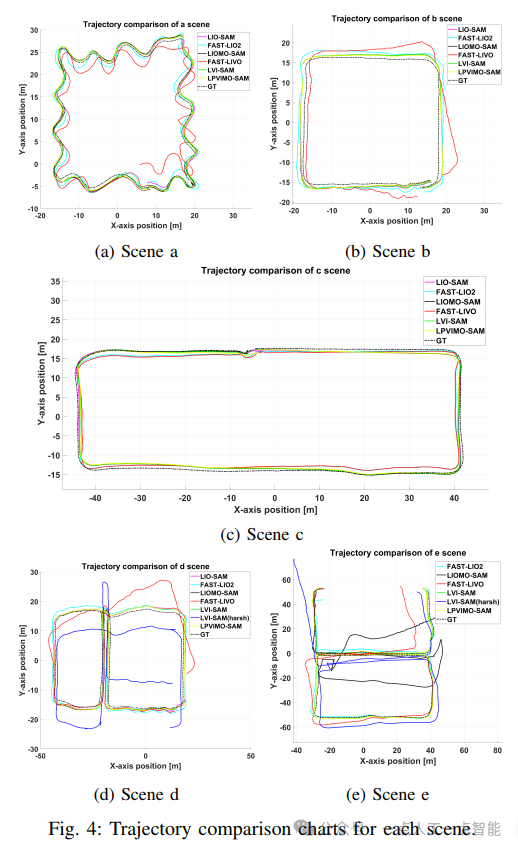
图4的轨迹对比图直观显示,在其他方法出现明显漂移的区域(如场景d中X=-40m附近),LPVIMO-SAM仍能紧密贴合真值轨迹。
这种稳定性源于偏振视觉的特征增强效果——如图6所示,在苛刻条件下(特征提取质量阈值0.9-0.95),传统VIO已无法工作(LVI-SAM(Harsh)完全失效),而基于偏振的PVIS仍能提取充足特征,使系统保持运转。
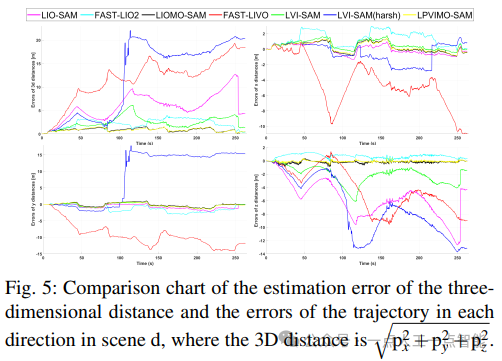
图5的场景d误差分析进一步揭示了各系统的性能差异。LIO-SAM的主要误差集中在Z轴(峰值超2米),反映了缺乏垂直约束的固有缺陷;FAST-LIO2虽抑制了Z轴漂移,但XY平面误差显著大于LPVIMO-SAM;而LPVIMO-SAM在所有坐标轴上的误差均稳定维持在±0.5米以内。这种全方位的精度优势印证了多传感器紧耦合的设计理念。
值得注意的是,论文坦承了系统的局限性——由于基于因子图优化,其输出频率(约50%于FAST-LIO2)和计算效率不及基于滤波的方法,这一诚实评估体现了作者科学的学术态度。
05 结论与展望
论文的结论部分凝练了LPVIMO-SAM的三大技术突破:针对低纹理环境的偏振视觉增强、针对LiDAR退化的多传感器约束,以及基于因子图的紧耦合优化框架。这些创新不仅解决了特定场景下的SLAM问题,更重要的意义在于提供了一种多模态传感的系统级设计范式。从应用角度看,该系统在无人机巡检、自动驾驶、移动机器人等领域具有广阔前景,特别是在开阔场地、地下空间、弱光环境等传统SLAM系统易失效的场景中。
技术的潜在改进方向也值得探讨。计算效率方面,可探索增量式因子图优化或异构计算加速,以提升系统实时性;传感器配置上,考虑引入事件相机或毫米波雷达进一步增强极端环境适应性;算法层面,深度学习与传统几何方法的结合可能开辟新的性能提升路径。此外,论文未涉及的长期定位问题(如季节变化下的地图更新)也是值得探索的方向。
总体而言,LPVIMO-SAM代表了多传感器SLAM领域的重要进展,其创新思路和系统架构将为后续研究提供宝贵参考。这项工作最突出的价值在于,它不局限于单一技术的突破,而是通过系统级创新实现了复杂环境下的鲁棒定位,为SLAM技术的实际应用扫清了重要障碍。未来随着传感器小型化和计算平台的进步,这种紧耦合多模态方法有望成为机器人感知的标准配置。